TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058815
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166152
出願日
2022-10-17
発明の名称
乗用型作業機
出願人
井関農機株式会社
代理人
個人
主分類
A01M
7/00 20060101AFI20240422BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 給水中に、例えば機体が動き出したような場合、ホースが抜けて貴重な薬液が漏れてしまうような問題があった。
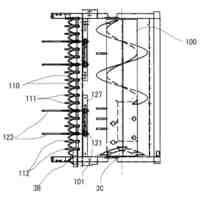
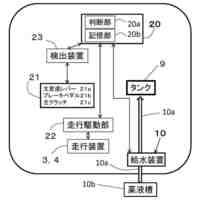
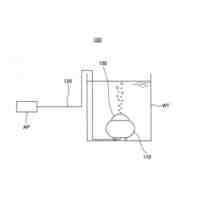
【解決手段】 走行装置3、4と、前記走行装置3、4を操作する操作部21と、前記走行装置3、4を駆動する走行駆動部22と、液体を貯留するタンク9と、前記タンク9へ給水を行う給水装置10と、前記操作部21の状態を検出する検出装置23と、前記検出装置23の検出結果に基づき、前記給水装置10を制御する制御部20を備え、
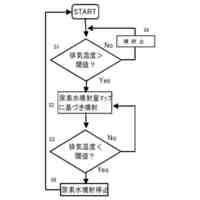
前記走行装置3、4が走行可能な状態になるように前記操作部21が操作されたことを前記検出装置23が検出した場合、前記制御部20は、前記給水装置10による前記タンク9への給水を停止させることを特徴とする乗用型作業機。
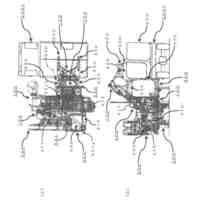
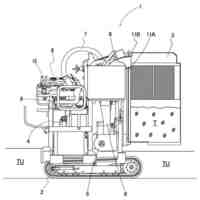
【選択図】 図2
特許請求の範囲
【請求項1】
走行装置と、前記走行装置を操作する操作部と、前記走行装置を駆動する走行駆動部と、液体を貯留するタンクと、前記タンクへ給水を行う給水装置と、前記操作部の状態を検出する検出装置と、前記検出装置の検出結果に基づき、前記給水装置を制御する制御部と、機体とを備え、
前記走行装置が走行可能な状態になるように前記操作部が操作されたことを前記検出装置が検出した場合、前記制御部は、前記給水装置による前記タンクへの給水を停止させることを特徴とする乗用型作業機。
続きを表示(約 1,100 文字)
【請求項2】
前記走行装置の走行可能な状態とは、前記操作部の主変速レバーが走行ポジションに位置した状態、または前記操作部のブレーキペダルが解除された状態、または前記走行装置の走行をオンオフする前記操作部の主クラッチが入りの状態である、請求項1記載の乗用型作業機。
【請求項3】
前記機体の速度を検出する車速センサが検出した車速が所定の速度以上になった場合、または、前記機体に備えられた位置情報測位システムによって測定された前記機体の位置が所定の時間以内に所定の距離以上変化した場合、または、前記走行装置の車輪の回転量を検出する回転量検出装置が所定の回転量以上の回転量を検出した場合に、前記制御部は前記給水装置による前記タンクへの給水を停止する、請求項2記載の乗用型作業機。
【請求項4】
前記機体には液体を散布する散布ブームを備え、前記散布ブームの移動量を検出する移動量センサが所定の距離以上の移動量を検出した場合は、前記制御部はその検出結果に基づいて、前記給水装置による前記タンクへの給水を停止する、請求項3に記載の乗用型作業機。
【請求項5】
前記制御部には、予め決められた前記散布ブームの退避位置が記憶されており、
前記機体に設けられた近接センサが、作業者が前記機体に近づいたことを検出すると、前記制御部はその検出結果に応じて前記散布ブームを、散布ブーム駆動機構を利用して前記所定の退避位置まで移動させる、請求項4記載の乗用型作業機。
【請求項6】
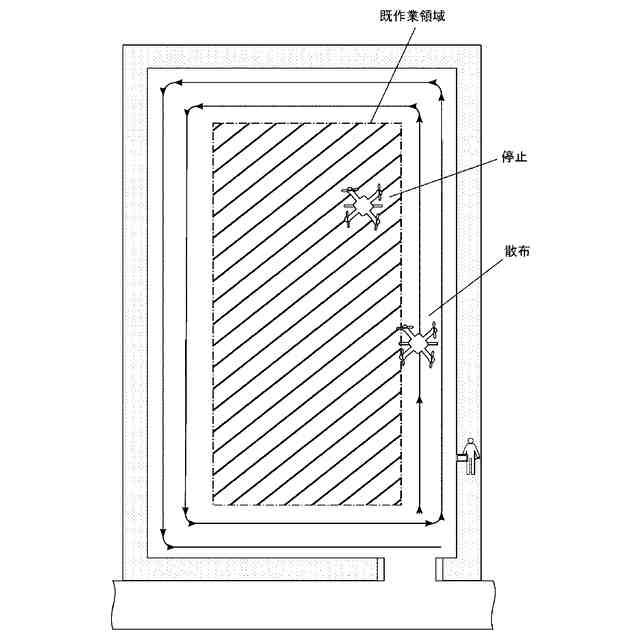
前記散布ブームによって液体が散布された圃場の既作業領域以外の未作業領域を散布することが出来る、ドローン用の散布ブームと撮像カメラを有するドローンをさらに備え、
前記未作業領域を埋める飛行ルートが予め設定されており、前記ドローンは、前記飛行ルートに沿って飛行しながら散布する自動操縦モードと、散布を停止してホバリングするホバリングモードと、手動操縦モードを有し、
前記自動操縦モードとホバリングモード時には、前記撮像カメラは自由に動くことが出来るが、前記自動操縦モードまたは前記ホバリングモードから前記手動操縦モードに切り替わると、前記撮像カメラの横方向の方位は固定され、上下の角度のみ動かせるように制御される、請求項5記載の乗用型作業機。
【請求項7】
前記機体には前記機体の傾斜を検出する傾斜検出装置を備え、前記傾斜検出装置が所定以上の傾斜を検出した場合には、前記制御部は前記給水装置による前記タンクへの給水を停止する、請求項3に記載の乗用型作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、薬剤散布機などの乗用型作業機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
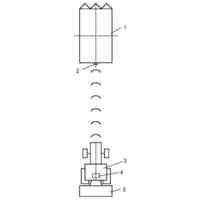
従来、薬液タンクを備える乗用型作業機は公知となっている。例えば先行技術(特許文献1)に示す乗用型作業機では、圃場に置いてある薬液槽から搭載しているタンクへポンプと給水ホースを用いて薬液を供給している。
【先行技術文献】
【特許文献】
【0003】
特開2010-200652号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、そのような従来の技術では、給水中に、例えば機体が動き出したような場合、ホースが抜けて貴重な薬液が漏れてしまう問題があったが、それに対する対策はなされていなかった。
【0005】
本発明は、例えば機体が動き出したような場合に対して、給水動作を適切に対処できる乗用型作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、
走行装置と、前記走行装置を操作する操作部と、前記走行装置を駆動する走行駆動部と、液体を貯留するタンクと、前記タンクへ給水を行う給水装置と、前記操作部の状態を検出する検出装置と、前記検出装置の検出結果に基づき、前記給水装置を制御する制御部と、機体とを備え、
前記走行装置が走行可能な状態になるように前記操作部が操作されたことを前記検出装置が検出した場合、前記制御部は、前記給水装置による前記タンクへの給水を停止させることを特徴とする乗用型作業機である。
【0007】
第2の本発明は、
前記走行装置の走行可能な状態とは、前記操作部の主変速レバーが走行ポジションに位置した状態、または前記操作部のブレーキペダルが解除された状態、または前記走行装置の走行をオンオフする前記操作部の主クラッチが入りの状態である、第1の本発明の乗用型作業機である。
【0008】
第3の本発明は、
前記機体の速度を検出する車速センサが検出した車速が所定の速度以上になった場合、または、前記機体に備えられた位置情報測位システムによって測定された前記機体の位置が所定の時間以内に所定の距離以上変化した場合、または、前記走行装置の車輪の回転量を検出する回転量検出装置が所定の回転量以上の回転量を検出した場合に、前記制御部は前記給水装置による前記タンクへの給水を停止する、第2の本発明の乗用型作業機である。
【0009】
第4の本発明は、
前記機体には液体を散布する散布ブームを備え、前記散布ブームの移動量を検出する移動量センサが所定の距離以上の移動量を検出した場合は、前記制御部はその検出結果に基づいて、前記給水装置による前記タンクへの給水を停止する、第3の本発明の乗用型作業機である。
【0010】
第5の本発明は、
前記制御部には、予め決められた前記散布ブームの退避位置が記憶されており、
前記機体に設けられた近接センサが、作業者が前記機体に近づいたことを検出すると、前記制御部はその検出結果に応じて前記散布ブームを、散布ブーム駆動機構を利用して前記所定の退避位置まで移動させる、第4の本発明の乗用型作業機である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
3日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
エンジン
10日前
井関農機株式会社
苗移植機
29日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
脱穀装置
3日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
コンバイン
8日前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
コンバイン
3日前
井関農機株式会社
精米炊飯機
2日前
井関農機株式会社
洗米炊飯装置
10日前
井関農機株式会社
資材散布装置
10日前
井関農機株式会社
乗用型作業機
17日前
井関農機株式会社
電動化コンバイン
7日前
井関農機株式会社
コンバインの走行制御システム
16日前
井関農機株式会社
複数作業車の連携制御システム
23日前
井関農機株式会社
ディーゼルエンジンの排気ガス浄化装置
10日前
個人
除草機
4日前
個人
産卵床
22日前
個人
動物飼育用ケージ
29日前
個人
水中装飾品
16日前
個人
猫用のトイレ
29日前
個人
水中生物採集器
22日前
株式会社シマノ
釣竿
17日前
株式会社徳工
集材装置
2日前
井関農機株式会社
コンバイン
3日前
個人
ペットケア補助具
10日前
株式会社マツバラ
消毒剤
1日前
株式会社大貴
動物用トイレ
7日前
井関農機株式会社
苗移植機
29日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
脱穀装置
3日前
株式会社寺田製作所
茶生葉摘採機
1日前
井関農機株式会社
作業車両
29日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ