TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024048887
公報種別
公開特許公報(A)
公開日
2024-04-09
出願番号
2022155026
出願日
2022-09-28
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20240402BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動運転の利便性や作業性が向上する作業車両を提供する。
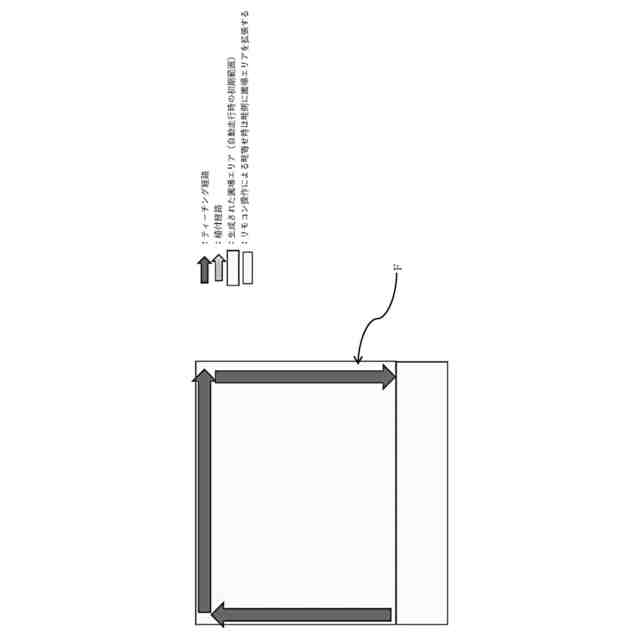
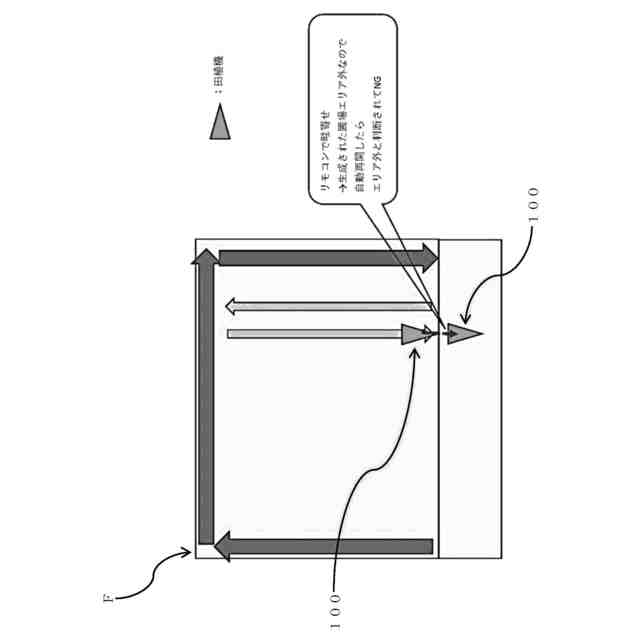
【解決手段】圃場Fの少なくとも一部に沿ったティーチング走行を行うことにより自動走行基準データを取得し、前記自動走行基準データに基づいて自動植付け走行を行う作業車両であって、所定の一辺の反対側の辺へ向かって行われる自動往路直進走行、所定の一辺へ向かって行われる自動復路直進走行、を備え、前記自動往路直進走行または、前記自動復路直進走行の開始位置で、機体が停止することを特徴とする。
【選択図】図2
特許請求の範囲
【請求項1】
圃場の少なくとも一部に沿ったティーチング走行を行うことにより自動走行基準データを取得し、前記自動走行基準データに基づいて自動植付け走行を行う作業車両であって、
所定の一辺の反対側の辺へ向かって行われる自動往路直進走行、所定の一辺へ向かって行われる自動復路直進走行、を備え、
前記自動往路直進走行または、前記自動復路直進走行の開始位置で、機体が停止することを特徴とする作業車両。
続きを表示(約 200 文字)
【請求項2】
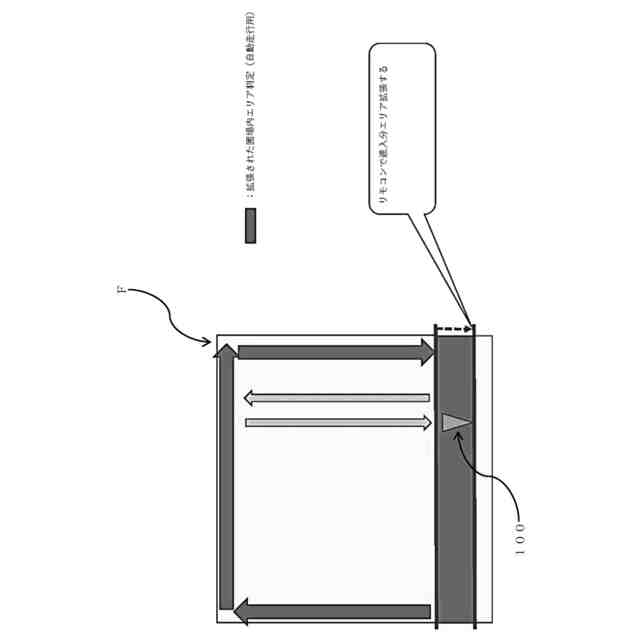
前記機体へ遠隔操作を行う遠隔操作具を備え、遠隔操作具により前記自動往路直進走行または、前記自動復路直進走行の開始位置で、機体が停止する停止予約の操作を行うことができる請求項1に記載の作業車両。
【請求項3】
前記遠隔操作具に表示機能を備え、前記停止予約により機体が停止したことを前記表示機能により作業者へ知らせることを特徴とする請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転を行うことが可能な田植機、トラクターなどの農業用の作業車両に関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、ステアリングモータを駆動してステアリングホイールの舵角を調整し、自動運転を行うことが可能な作業車両が開示されている。以下、作業車両のことを単に「車両」ともいう。
【0003】
作業車両には、自動運転を行う間、特に、無人の状態で作業車両が自動運転を行う車両は、ある程度遠隔操作できることが望ましい。
【先行技術文献】
【特許文献】
【0004】
特開2021-108595号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、自動運転から遠隔操作へ切り替え作業が煩わしいことや、遠隔操作を行う場面が少ない方が作業性は良い。
【0006】
したがって、本発明は、自動運転の利便性や作業性が向上する作業車両を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明に係る作業車両(1)は、圃場(F)の少なくとも一部に沿ったティーチング走行を行うことにより自動走行基準データを取得し、前記自動走行基準データに基づいて自動植付け走行を行う作業車両であって、
所定の一辺の反対側の辺へ向かって行われる自動往路直進走行、所定の一辺へ向かって行われる自動復路直進走行、を備え、
前記自動往路直進走行または、前記自動復路直進走行の開始位置で、機体が停止することを特徴とする。
【発明の効果】
【0008】
本発明に係る作業車両によれば、例えば、機体の後方に備えた作業装置へ作業資材を補給する際に、遠隔操作具で機体を操作し停止等の操作をする必要がないため、作業性が向上する。また、補充作業をスムーズに行うことができ、作業性が向上する。また、自動運転から遠隔操作への切り替えが不要であるため、作業性や利便性が良い。
【図面の簡単な説明】
【0009】
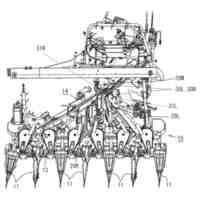
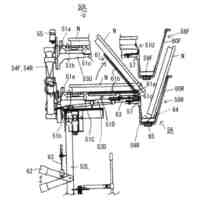
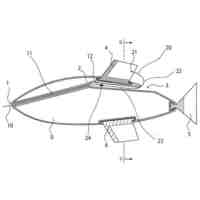
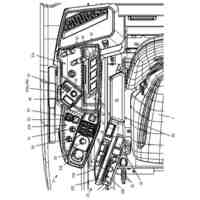
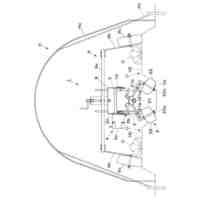
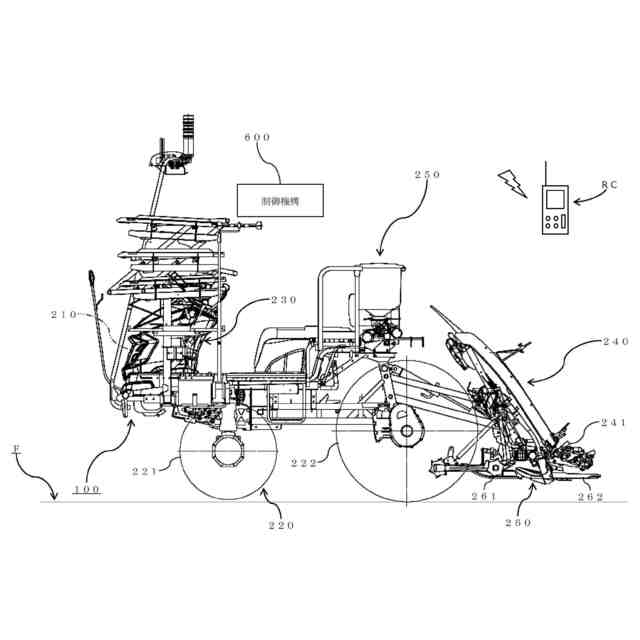
本発明における実施の形態の田植え機の左側面図
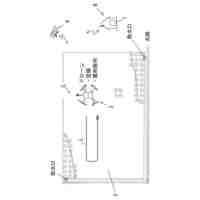
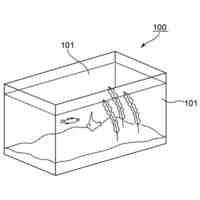
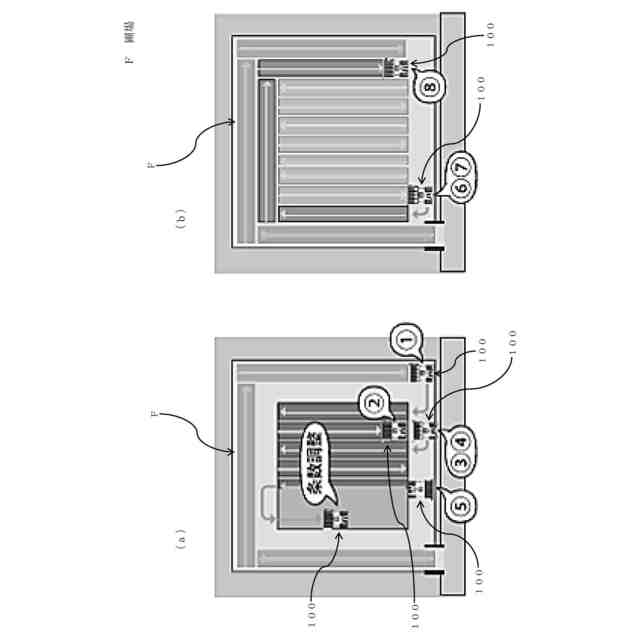
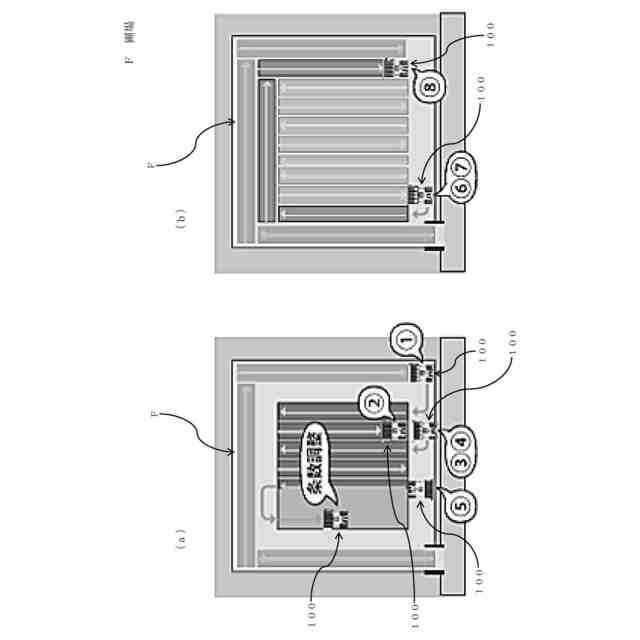
(a)本発明における実施の形態の田植え機の苗植付け作業の説明図(その一)、(b)本発明における実施の形態の田植え機の苗植付け作業の説明図(その二)
本発明における実施の形態の田植え機の苗植付け作業の説明図(その三)
本発明における実施の形態の田植え機の苗植付け作業の説明図(その四)
本発明における実施の形態の田植え機の苗植付け作業の説明図(その五)
本発明における実施の形態の田植え機の苗植付け作業の説明図(その六)
本発明における実施の形態の田植え機の苗植付け作業の説明図(その七)
本発明における実施の形態の田植え機の苗植付け作業の説明図(その八)
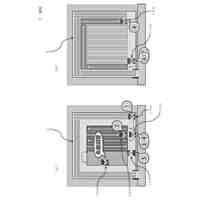
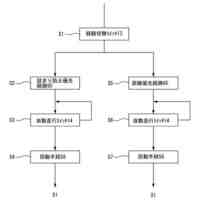
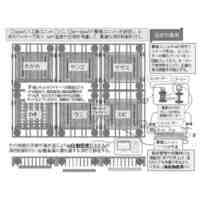
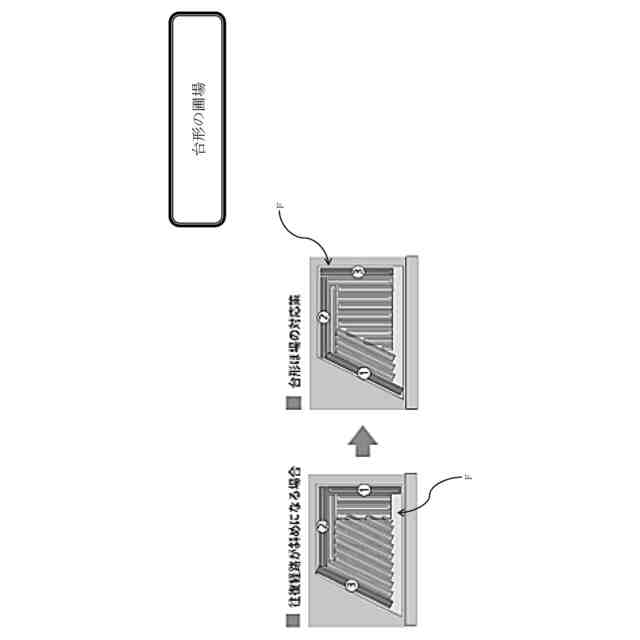
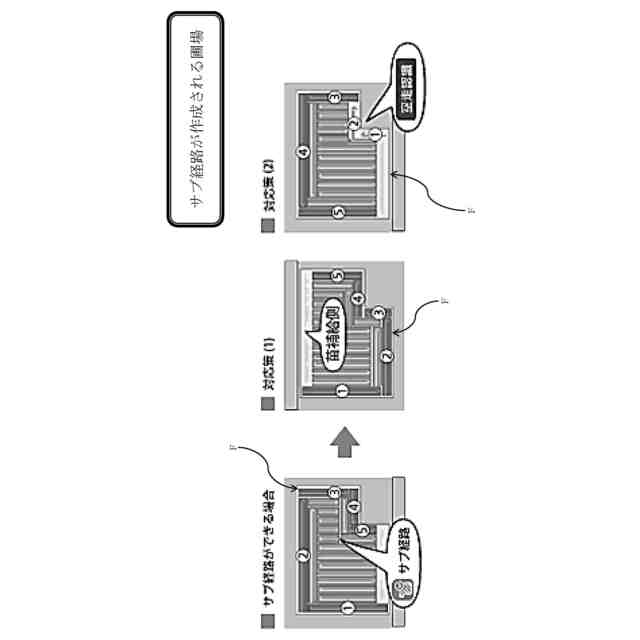
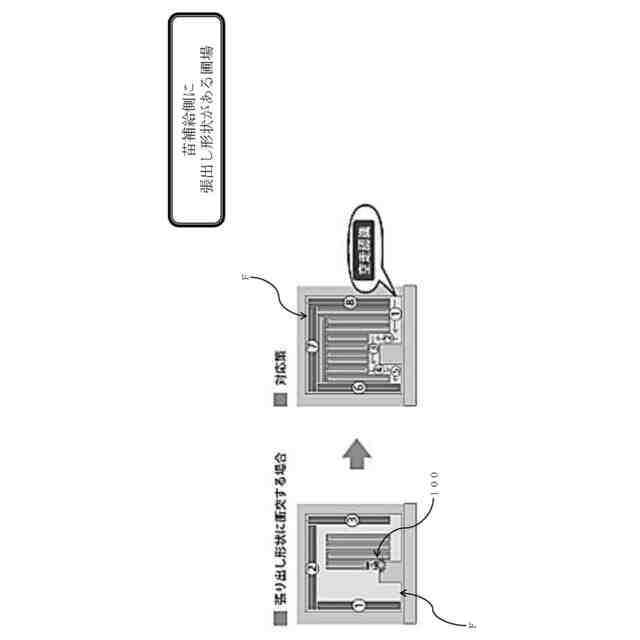
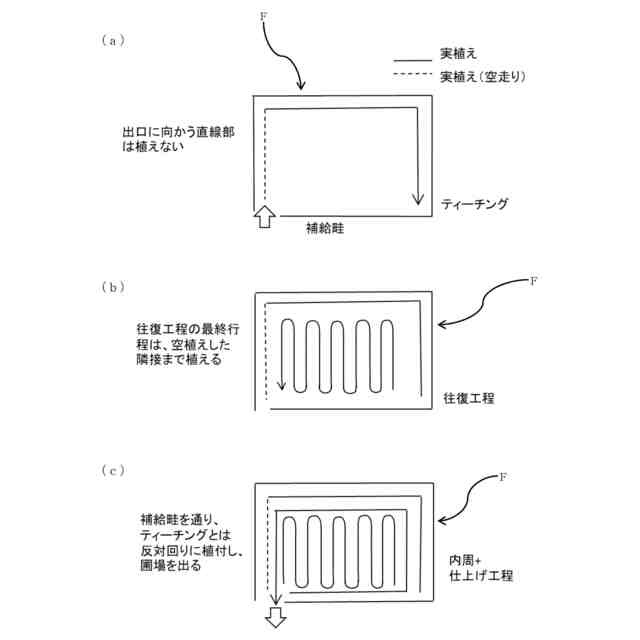
(a)本発明における実施の形態のロボット田植え機の走行経路の説明図(その一)、(b)本発明における実施の形態のロボット田植え機の走行経路の説明図(その二)、(c)本発明における実施の形態のロボット田植え機の走行経路の説明図(その三)、
(a)本発明における実施の形態のロボット田植え機の走行経路の説明図(その四)、(b)本発明における実施の形態のロボット田植え機の走行経路の説明図(その五)、(c)本発明における実施の形態のロボット田植え機の走行経路の説明図(その六)、(d)本発明における実施の形態のロボット田植え機の走行経路の説明図(その七)
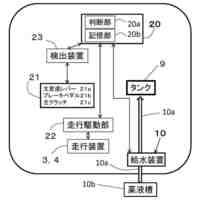
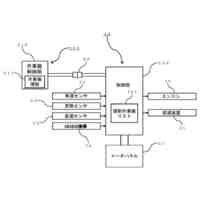
本発明における実施の形態の直進制御における圃場診断およびフィードバック制御の説明図
【発明を実施するための形態】
【0010】
図面を参照しながら、本発明における実施の形態について詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
22日前
井関農機株式会社
苗移植機
12日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
精米設備
19日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
乗用型作業機
今日
井関農機株式会社
乗用型苗植機
15日前
井関農機株式会社
防除システム
19日前
井関農機株式会社
穀稈の刈取作業方法
18日前
井関農機株式会社
複数作業車の連携制御システム
6日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
コンバイン
19日前
個人
産卵床
5日前
個人
魚釣用ルアー
27日前
個人
動物飼育用ケージ
12日前
個人
猫用のトイレ
12日前
株式会社シマノ
釣竿
今日
井関農機株式会社
作業車両
21日前
個人
水中生物採集器
5日前
井関農機株式会社
作業車両
21日前
個人
計量カップ付き肥料袋
25日前
個人
木造人工島の海産物農業
21日前
井関農機株式会社
収穫機
22日前
井関農機株式会社
苗移植機
12日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
12日前
株式会社大垣化工
糸収容具
13日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
20日前
株式会社大貴
動物用トイレ
5日前
井関農機株式会社
作業車両
22日前
みのる産業株式会社
作業台車
14日前
日東電工株式会社
水槽
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ