TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024052732
公報種別
公開特許公報(A)
公開日
2024-04-12
出願番号
2022153677
出願日
2022-09-27
発明の名称
穀稈の刈取作業方法
出願人
井関農機株式会社
代理人
弁理士法人永井国際特許事務所
主分類
A01B
69/00 20060101AFI20240405BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】1台のコンバインで圃場内の倒伏した穀稈の刈取作業を効率良く行うことができる穀稈の刈取作業方法を提供する。
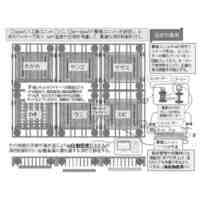
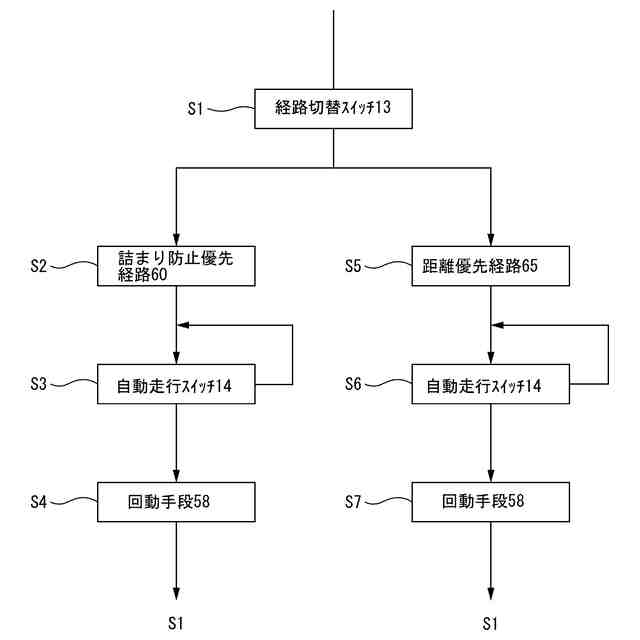
【解決手段】操縦部(5)に、穀稈の倒伏角度(A)が予め設定した角度を超える倒伏穀稈が刈取装置(3)に詰まるのを抑制する第1優先経路(60)と、走行装置(2)の走行距離を短くする第2優先経路(65)を切替えるスイッチ(13)を設け、第1優先経路(60)側にスイッチが(13)が切替えられている場合には、操縦部(5)のコントローラ(30)は、刈取装置(3)が倒伏穀稈を左倒伏刈り(55A)、又は、追い刈り(55B)する往復刈りの第1設定経路(61)を設定し、第2優先経路(65)側にスイッチが(13)が切替えられている場合には、コントローラ(30)は、倒伏穀稈を刈取装置(3)で左倒伏刈り(55A)、追い刈り(55B)、右倒伏刈り(55C)、及び向い刈り(55D)する反時計の回り刈りの第2設定経路(66)を設定する。
【選択図】図14
特許請求の範囲
【請求項1】
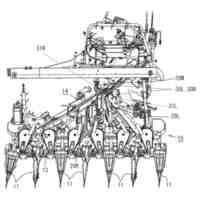
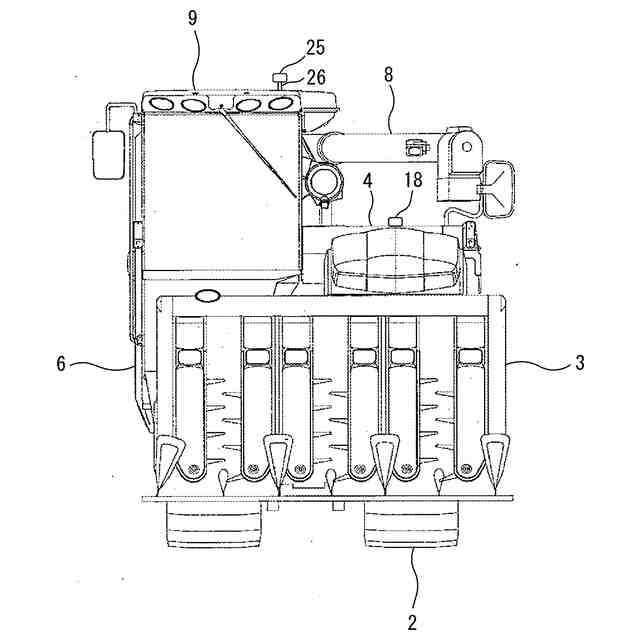
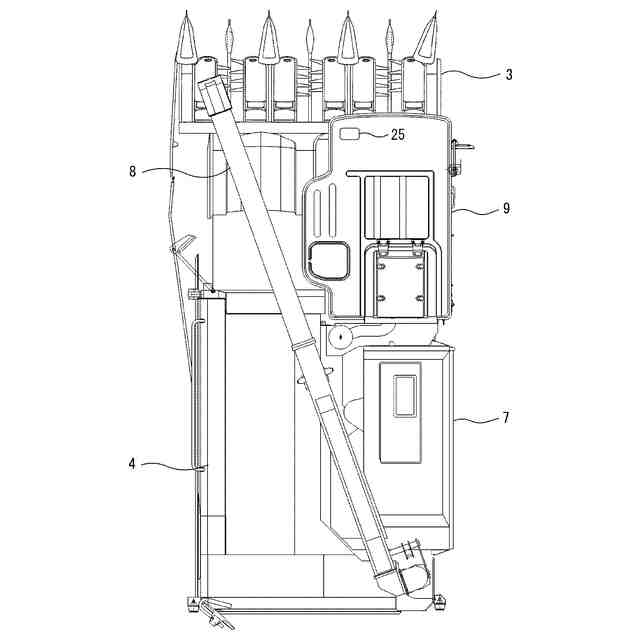
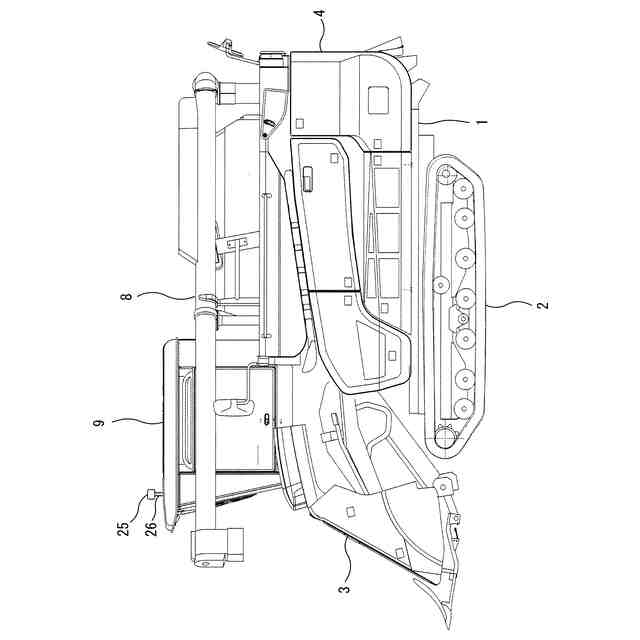
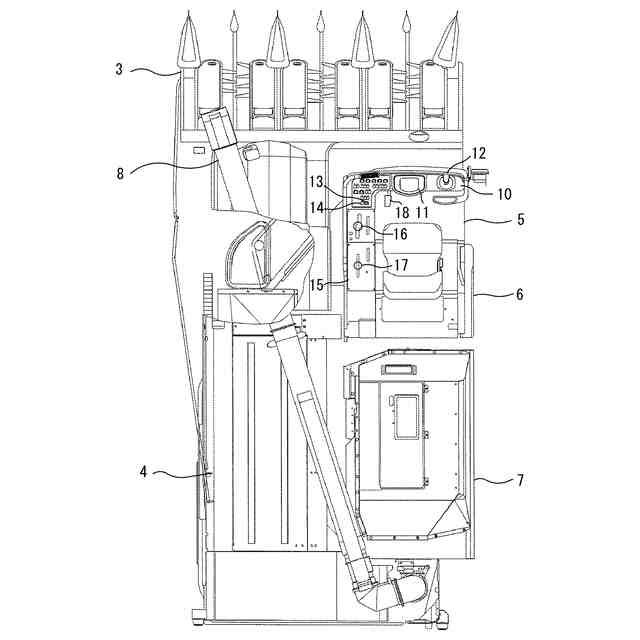
機体フレーム(1)の下側に圃場を走行する走行装置(2)と、該機体フレーム(1)の前側に穀稈を刈取る刈取装置(3)と、前記刈取装置(3)の後方左側に作業者が搭乗する操縦部(5)を設けたコンバインを自動走行させて圃場の穀稈を刈取る穀稈の刈取作業方法であって、
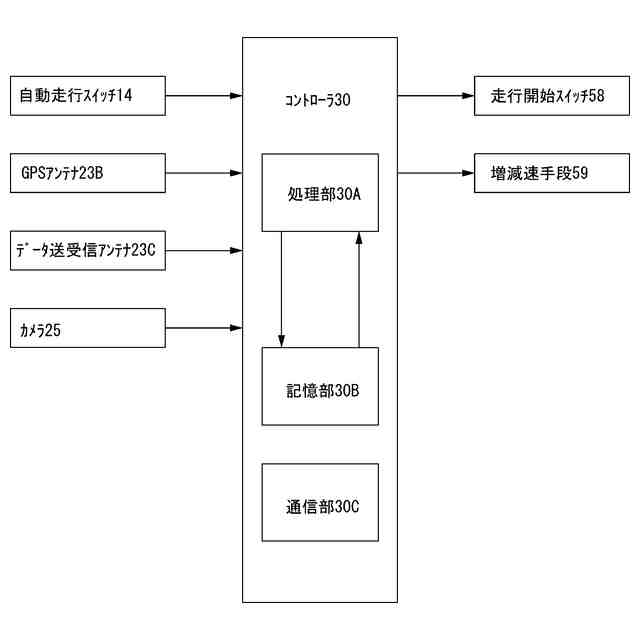
前記操縦部(5)に、前記穀稈の倒伏角度(A)が予め設定した角度を超える倒伏穀稈が刈取装置(3)に詰まるのを抑制する第1優先経路(60)と、前記走行装置(2)の走行距離を短くする第2優先経路(65)を切替えるスイッチ(13)を設け、
前記第1優先経路(60)側にスイッチが(13)が切替えられている場合には、前記操縦部(5)のコントローラ(30)は、前記刈取装置(3)が倒伏穀稈を左倒伏刈り(55A)、又は、追い刈り(55B)する往復刈りの第1設定経路(61)を設定し、
前記第2優先経路(65)側にスイッチが(13)が切替えられている場合には、前記コントローラ(30)は、前記倒伏穀稈を刈取装置(3)で左倒伏刈り(55A)、追い刈り(55B)、右倒伏刈り(55C)、及び向い刈り(55D)する反時計の回り刈りの第2設定経路(66)を設定することを特徴する穀稈の刈取作業方法。
続きを表示(約 800 文字)
【請求項2】
前記コントローラ(30)は、左倒伏刈り(55A)と追い刈り(55B)の場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を第1直線(56B)上に沿って増減速し、
前記コントローラ(30)は、右倒伏刈り(55C)と向かい刈り(55D)の場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を、前記第1直線(56B)よりも高速の第2直線(56C)上に沿って増減速する請求項1記載の穀稈の刈取作業方法。
【請求項3】
前記コントローラ(30)は、前記左倒伏刈り(55A)と追い刈り(55B)の場合で、且つ、倒伏穀稈の穂先高さ(B)が予め設定した高さを超える場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を第1直線(56B)よりも高速の第2直線(56C)上に沿って増減速し、
前記コントローラ(30)は、前記右倒伏刈り(55C)と向かい刈り(55D)の場合で、且つ、倒伏穀稈の穂先高さ(B)が所定の高さを超える場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を、前記第2直線(56C)よりも高速の第3直線(56D)上に沿って増減速する請求項2記載の穀稈の刈取作業方法。
【請求項4】
前記穂先高さ(B)を120cmに設定した請求項3記載の穀稈の刈取作業方法。
【請求項5】
前記倒伏角度(A)を60度に設定した請求項1~4のいずれか1項に記載の穀稈の刈取作業方法。
【請求項6】
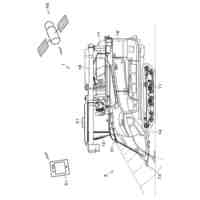
前記操縦部(5)のキャビン(9)の上部に、前記倒伏角度(A)と穂先高さ(B)を測定するカメラ(25)を上下方向の昇降と軸心方向に回動する支持装置(26)を介して設けた請求項1記載の穀稈の刈取作業方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動走行しているコンバインの穀稈の刈取作業方法に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
圃場に植立された穀稈の倒伏状態や圃場の湿田状態に応じて大型コンバインと小型コンバインを自動走行させて圃場の穀稈の刈取作業を行う技術が知られている。(特許文献1)
【先行技術文献】
【特許文献】
【0003】
特開2021―19531号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の技術では、圃場に少なくとも大型コンバインと小型コンバインを自動走行させて穀稈を刈取る必要があることから複数台のコンバインを所有する必要があった。
【0005】
そこで、本発明は、1台のコンバインで圃場内の倒伏した穀稈の刈取作業を効率良く行うことができる穀稈の刈取作業方法を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決した本発明は次のとおりである。
すなわち、請求項1記載の発明は、機体フレーム(1)の下側に圃場を走行する走行装置(2)と、該機体フレーム(1)の前側に穀稈を刈取る刈取装置(3)と、前記刈取装置(3)の後方左側に作業者が搭乗する操縦部(5)を設けたコンバインを自動走行させて圃場の穀稈を刈取る穀稈の刈取作業方法であって、
前記操縦部(5)に、前記穀稈の倒伏角度(A)が予め設定した角度を超える倒伏穀稈が刈取装置(3)に詰まるのを抑制する第1優先経路(60)と、前記走行装置(2)の走行距離を短くする第2優先経路(65)を切替えるスイッチ(13)を設け、前記第1優先経路(60)側にスイッチが(13)が切替えられている場合には、前記操縦部(5)のコントローラ(30)は、前記刈取装置(3)が倒伏穀稈を左倒伏刈り(55A)、又は、追い刈り(55B)する往復刈りの第1設定経路(61)を設定し、前記第2優先経路(65)側にスイッチが(13)が切替えられている場合には、前記コントローラ(30)は、前記倒伏穀稈を刈取装置(3)で左倒伏刈り(55A)、追い刈り(55B)、右倒伏刈り(55C)、及び向い刈り(55D)する反時計の回り刈りの第2設定経路(66)を設定することを特徴する穀稈の刈取作業方法である。
【0007】
請求項2記載の発明は、前記コントローラ(30)は、左倒伏刈り(55A)と追い刈り(55B)の場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を第1直線(56B)上に沿って増減速し、前記コントローラ(30)は、右倒伏刈り(55C)と向かい刈り(55D)の場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を、前記第1直線(56B)よりも高速の第2直線(56C)上に沿って増減速する請求項1記載の穀稈の刈取作業方法である。
【0008】
請求項3記載の発明は、前記コントローラ(30)は、前記左倒伏刈り(55A)と追い刈り(55B)の場合で、且つ、倒伏穀稈の穂先高さ(B)が予め設定した高さを超える場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を第1直線(56B)よりも高速の第2直線(56C)上に沿って増減速し、前記コントローラ(30)は、前記右倒伏刈り(55C)と向かい刈り(55D)の場合で、且つ、倒伏穀稈の穂先高さ(B)が所定の高さを超える場合には、前記走行装置(2)の走行速度に対して、前記刈取装置(3)の刈取回転数を、前記第2直線(56C)よりも高速の第3直線(56D)上に沿って増減速する請求項2記載の穀稈の刈取作業方法である。
【0009】
請求項4記載の発明は、前記穂先高さ(B)を120cmに設定した請求項3記載の穀稈の刈取作業方法である。
【0010】
請求項5記載の発明は、前記倒伏角度(A)を60度に設定した請求項1~4のいずれか1項に記載の穀稈の刈取作業方法である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
乗用型作業機
今日
個人
産卵床
5日前
個人
魚釣用ルアー
27日前
個人
動物飼育用ケージ
12日前
個人
猫用のトイレ
12日前
株式会社シマノ
釣竿
今日
個人
計量カップ付き肥料袋
25日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
21日前
個人
水中生物採集器
5日前
個人
木造人工島の海産物農業
21日前
井関農機株式会社
収穫機
22日前
株式会社大垣化工
糸収容具
13日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
苗移植機
12日前
株式会社大貴
動物用トイレ
5日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
12日前
みのる産業株式会社
作業台車
14日前
日東電工株式会社
水槽
28日前
井関農機株式会社
乗用型苗植機
15日前
井関農機株式会社
乗用型作業機
今日
カゴメ株式会社
トマト種子の製造方法
28日前
ロンタイ株式会社
植生体
12日前
井関農機株式会社
防除システム
19日前
井関農機株式会社
台木切断装置
25日前
MWPO株式会社
キャットタワー
5日前
個人
水田用除草機器および水田用除草体
13日前
有限会社伊藤テクノリサーチ
防草施工方法
6日前
株式会社クボタ
田植機
12日前
グローブライド株式会社
ルアー
22日前
株式会社 ジークラック
ルアー
13日前
株式会社クボタ
降雨制御システム
13日前
有限会社シーム
横紐支持具
21日前
アース製薬株式会社
線香
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ