TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024049703
公報種別
公開特許公報(A)
公開日
2024-04-10
出願番号
2022156096
出願日
2022-09-29
発明の名称
作業支援装置及び作業支援方法
出願人
株式会社大林組
代理人
個人
,
個人
主分類
B66C
21/00 20060101AFI20240403BHJP(巻上装置;揚重装置;牽引装置)
要約
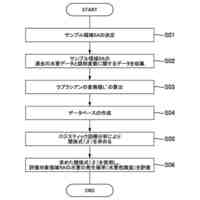
【課題】的確に、作業装置の所在位置を特定するための作業支援装置及び作業支援方法を提供する。
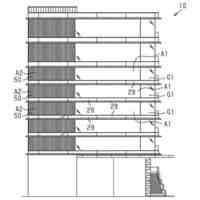
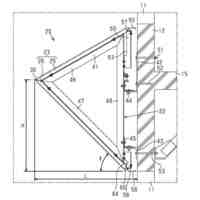
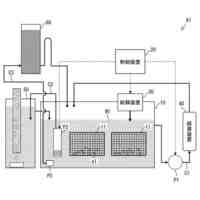
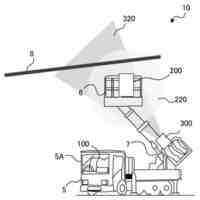
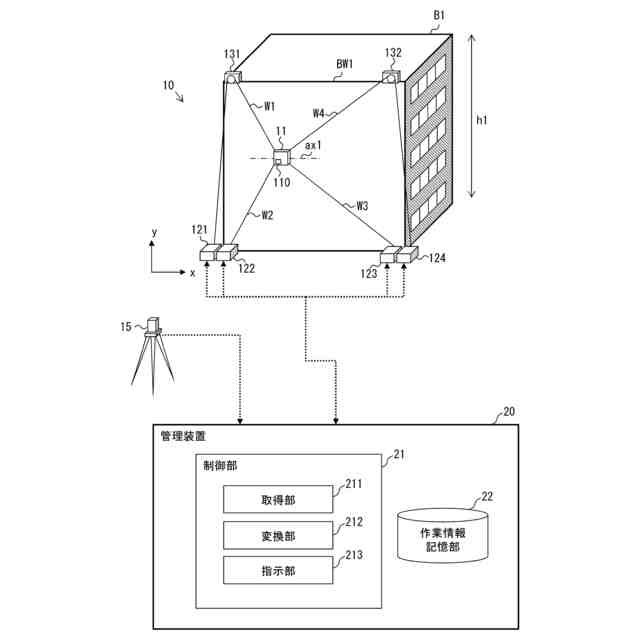
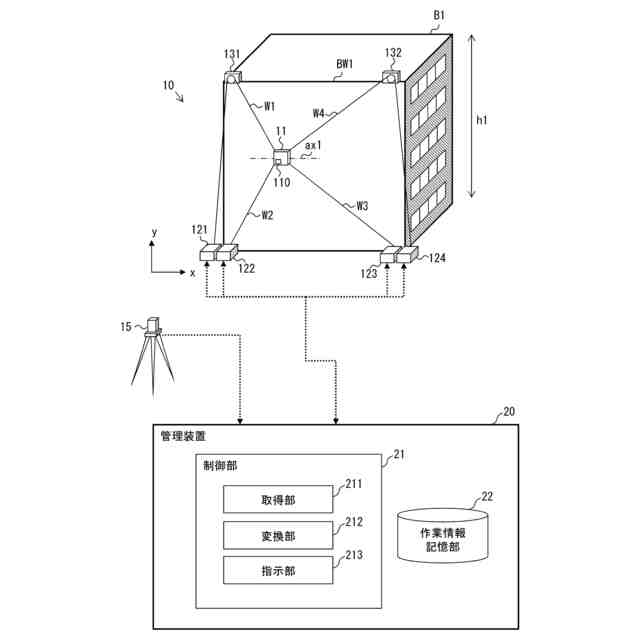
【解決手段】作業支援装置10は、作業対象領域の各頂点に配置された各駆動点からワイヤを繰り出すウィンチ装置121~124と、ウィンチ装置121~124から繰り出された各ワイヤW1~W4により張り渡される作業装置11と、繰り出すウィンチ装置121~124から、各駆動点から繰り出された各ワイヤの繰り出し量を取得する管理装置20と、を備える。そして、管理装置20が、取得した各繰り出し量の一部を組み合わせて、作業装置11の所在位置を特定する。
【選択図】図1
特許請求の範囲
【請求項1】
作業対象領域の各頂点に配置された各駆動点からワイヤを繰り出す巻き取り装置と、
前記巻き取り装置から繰り出された各ワイヤにより張り渡される移動体と、
前記巻き取り装置から、各駆動点から繰り出された前記各ワイヤの繰り出し量を取得する管理装置と、を備え、
前記管理装置が、前記取得した各繰り出し量の一部を組み合わせて、前記移動体の所在位置を特定することを特徴とする作業支援装置。
続きを表示(約 410 文字)
【請求項2】
前記管理装置が、前記取得した各繰り出し量の中で、前記各ワイヤの張り渡し状況に応じて、前記移動体の所在位置を特定する組み合わせを選択することを特徴とする請求項1に記載の作業支援装置。
【請求項3】
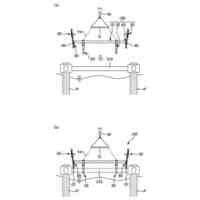
前記張り渡し状況として、前記ワイヤの水平方向に対する傾きを用いることを特徴とする請求項2に記載の作業支援装置。
【請求項4】
作業対象領域の各頂点に配置された各駆動点からワイヤを繰り出す巻き取り装置と、
前記巻き取り装置から繰り出された各ワイヤにより張り渡される移動体と、
前記巻き取り装置から、各駆動点から繰り出された前記各ワイヤの繰り出し量を取得する管理装置と、を備えた作業支援装置を用いた作業支援方法であって、
前記管理装置が、前記取得した各繰り出し量の一部を組み合わせて、前記移動体の所在位置を特定することを特徴とする作業支援方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体を用いた作業を支援する作業支援装置及び作業支援方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
建物の壁面等において、掃除や補修工事等を行なうことがある。このため、壁面を垂直方向に移動できるよう構成した壁面移動ロボットを用いることがある(例えば、特許文献1参照。)。この文献に記載の壁面移動ロボットは、壁面に沿って左右方向及び上下方向に移動するように垂直状態に保持されるロボット本体を備える。ロボット本体は、第1~第4のプーリーと、プーリーに巻き掛けされた第1~第4のワイヤと、各ワイヤを巻き取る第1~第4のワイヤ巻取機構とを備える。そして、各第1~第4のワイヤ巻取機構を制御することにより、壁面に沿って水平及び垂直方向に移動する。
【0003】
また、壁面に沿って、装置の姿勢を保ちながら装置を移動させる装置保持具も検討されている(例えば、特許文献2参照。)。この文献に記載の装置保持具は、壁面に対してロボットユニットを接触させる第1プロペラ機構と、ロボットユニットの傾き及び揺れを抑制する第2プロペラ機構及び第3プロペラ機構とを備える。更に、ケースは、本体部の上面の一点において、上方の2点の吊架ユニットから吊り下がる2本の第1ワイヤの端部を固定する吊下部を備える。
【先行技術文献】
【特許文献】
【0004】
実開平6-55976号公報
特開2021-115889号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された第1実施例では、壁面ロボットでワイヤを巻き取るため、構造が複雑になる。そして、駆動モータを備えたロボット本体の重量が大きくなる。また、第2実施例では、一端が壁面の四隅に設けられたプーリーは駆動モータにより個別に回転駆動される。この場合、ワイヤが自重で弛んだ場合、的確な位置を特定することが困難である。また、特許文献2に記載された技術では、ロボットユニットがプロペラ機構を有するため、構造が複雑になる。
【課題を解決するための手段】
【0006】
上記課題を解決するための作業支援装置は、作業対象領域の各頂点に配置された各駆動点からワイヤを繰り出す巻き取り装置と、前記巻き取り装置から繰り出された各ワイヤにより張り渡される移動体と、前記巻き取り装置から、各駆動点から繰り出された前記各ワイヤの繰り出し量を取得する管理装置と、を備える。そして、前記管理装置が、前記取得した各繰り出し量の一部を組み合わせて、前記移動体の所在位置を特定する。
【発明の効果】
【0007】
本発明は、的確に、作業装置の所在位置を特定することができる。
【図面の簡単な説明】
【0008】
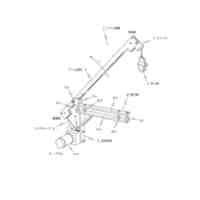
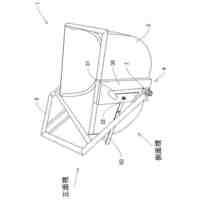
実施形態における作業支援装置の説明図である。
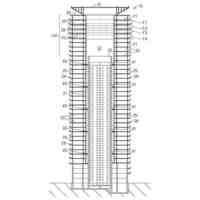
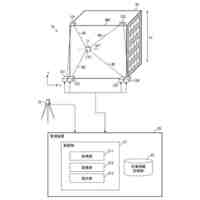
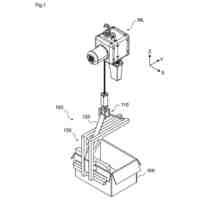
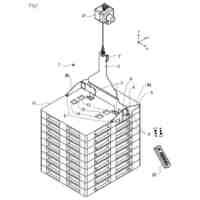
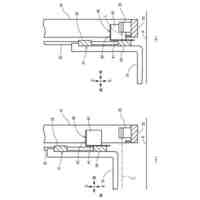
実施形態のハードウェア構成の説明図である。
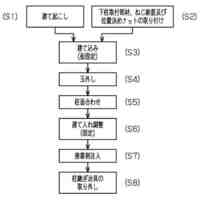
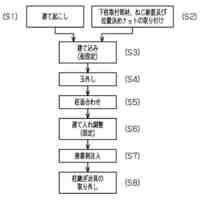
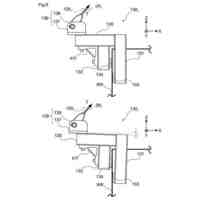
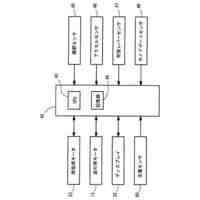
実施形態における処理手順の説明図である。
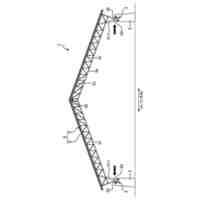
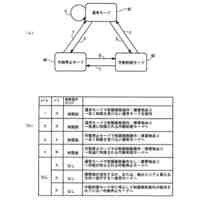
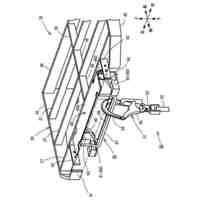
実施形態における作業装置の位置関係の説明図である。
実施形態における作業装置の位置関係の説明図である。
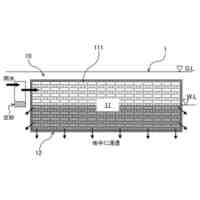
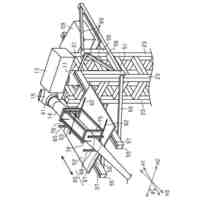
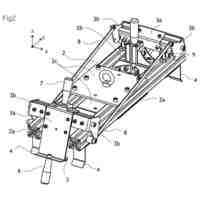
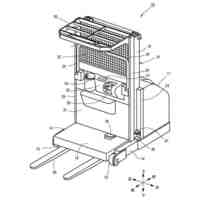
別例の作業支援装置の説明図である。
別例の作業支援装置の説明図である。
【発明を実施するための形態】
【0009】
以下、図1~図5を用いて、作業支援装置及び作業支援方法の一実施形態を説明する。
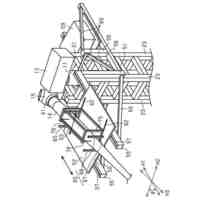
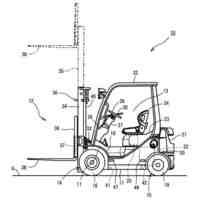
図1に示す作業支援装置10(移動体)を用いて、高さh1の建物B1の壁面BW1(作業対象領域)の検査や補修等を行なう。
【0010】
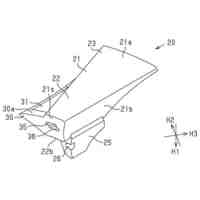
作業支援装置10は、作業装置11、ウィンチ装置121,122,123,124、プーリー装置131,132、管理装置20を備える。
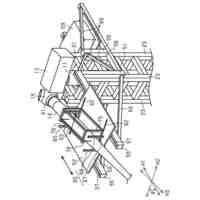
作業装置11は、検査作業や補修作業等のための作業機構(検査装置、補修装置等)を備えるとともに、壁面BW1に沿って移動する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建物
23日前
株式会社大林組
制振建物
16日前
株式会社大林組
地下貯留槽
22日前
株式会社大林組
屋根及び建物
2日前
株式会社大林組
庇および構造物
23日前
株式会社大林組
接続構造及び接続方法
28日前
株式会社大林組
接続構造及び接続方法
28日前
株式会社大林組
作業支援装置及び作業支援方法
23日前
株式会社大林組
貝類養殖方法及び貝類養殖システム
3日前
株式会社大林組
切断装置及び棒状部材の切断撤去方法
28日前
株式会社大林組
回転体設置方法およびブレードリフトアップ装置
8日前
株式会社大林組
貫入抵抗低減装置及びサクション構造体の貫入方法
8日前
株式会社大林組
水害危険度評価方法、及び、水害危険度評価システム
24日前
株式会社大林組
吊り治具
14日前
株式会社大林組
沈下解析システム、沈下解析方法及び沈下解析プログラム
17日前
株式会社大林組
接続構造、踏板ピース、螺旋階段、および、螺旋階段の組立方法
8日前
株式会社大林組
回転体設置方法
1日前
株式会社大林組
接触防止支援方法、接触防止支援システム、及び接触防止支援装置
25日前
株式会社大林組
建築計画提案システム、建築計画提案方法及び建築計画提案プログラム
1日前
株式会社大林組
ブレードリフトアップ装置
8日前
株式会社大林組
柱施工方法及び柱面合わせ治具
14日前
株式会社大林組
柱施工方法及び建て入れ調整治具
14日前
個人
搬送装置
12か月前
個人
リフト装置
11か月前
個人
高低間移動補助装置
8か月前
ユニパルス株式会社
吊具
2か月前
ユニパルス株式会社
吊具
2か月前
ユニパルス株式会社
吊具装置
9か月前
個人
吊りバケット装置
4か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社豊田自動織機
荷役車両
4か月前
株式会社豊田自動織機
産業車両
8か月前
株式会社豊田自動織機
荷役車両
22日前
株式会社豊田自動織機
荷役車両
4か月前
株式会社豊田自動織機
荷役車両
8日前
株式会社豊田自動織機
産業車両
5か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ