TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024036899
公報種別
公開特許公報(A)
公開日
2024-03-18
出願番号
2022141441
出願日
2022-09-06
発明の名称
発電システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
H02P
9/00 20060101AFI20240311BHJP(電力の発電,変換,配電)
要約
【課題】発電機が出力する交流電圧の変化に追従して電圧重畳装置が印加する電圧を制御する。
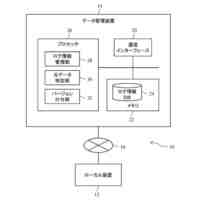
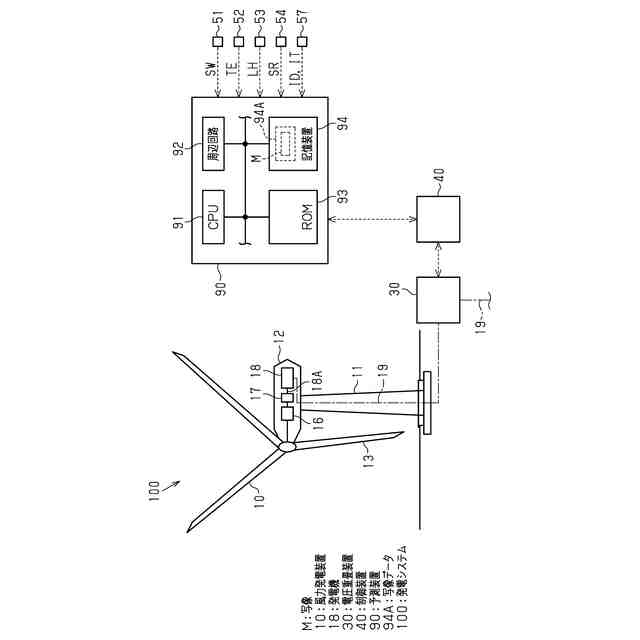
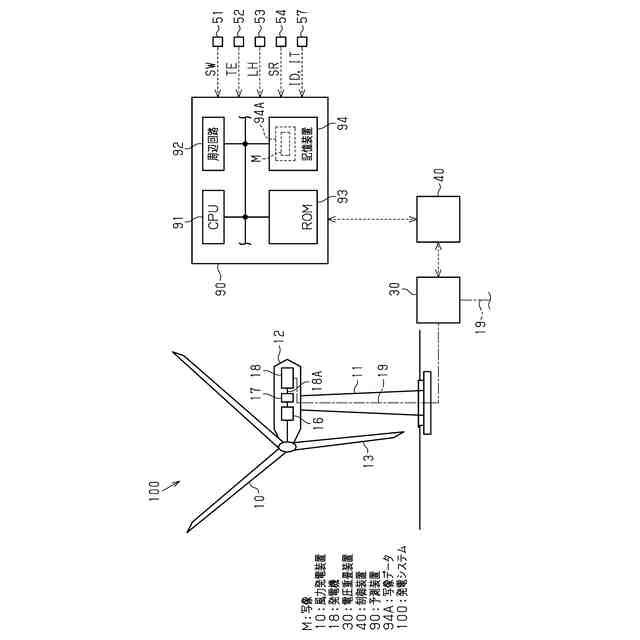
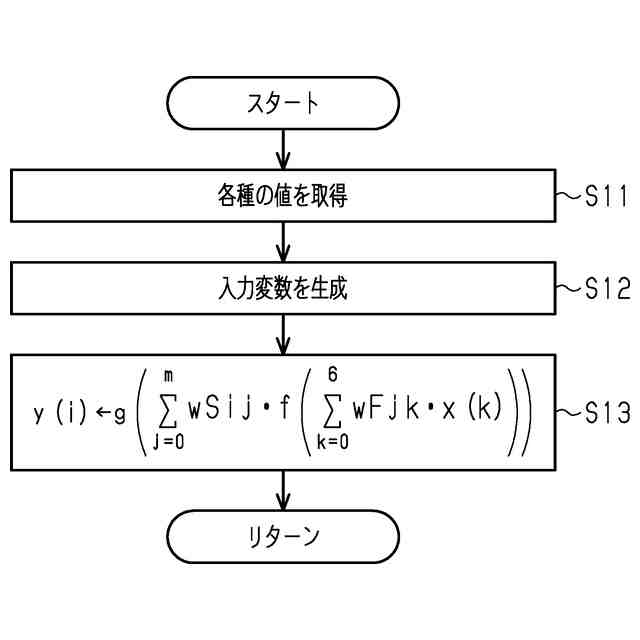
【解決手段】発電システム100は、風力発電装置10、電圧重畳装置30、制御装置40、及び予測装置90を備えている。電圧重畳装置30は、風力発電装置10の発電機18が出力する交流電圧のうちのノイズ成分の波形に対して、逆位相の波形の電圧を印加する。予測装置90は、複数の入力変数が入力されることにより、予め定められた一定時間後のノイズ成分の予測波形を示す出力変数を出力する写像Mを規定する写像データ94Aを記憶している。写像Mは、予め機械学習により学習されたものである。予測装置90は、入力変数を取得する取得処理と、複数の入力変数を写像に入力することによって、出力変数の値を出力する算出処理と、を実行する。制御装置40は、出力変数で示される予測波形に基づいて電圧重畳装置30が印加する電圧を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
風車及び発電機を有する風力発電装置と、
前記発電機が出力する交流電圧のうちのノイズ成分の波形に対して、逆位相の波形の電圧を印加する電圧重畳装置と、
前記電圧重畳装置を制御する制御装置と、
前記ノイズ成分の波形を予測する予測装置と、を備える発電システムであって、
前記予測装置は、実行装置と、記憶装置と、を備え、
前記記憶装置は、複数の入力変数が入力されることにより、予め定められた一定時間後の前記ノイズ成分の予測波形を示す出力変数を出力する写像を規定する写像データを記憶しており、
前記写像は、予め機械学習により学習されたものであり、
前記写像は、前記入力変数の1つとして、前記風車に衝突する風の風速を示す変数を含み、
前記実行装置は、
前記入力変数を取得する取得処理と、
前記取得処理により取得した複数の前記入力変数を前記写像に入力することによって、前記出力変数の値を出力する算出処理と、を実行し、
前記制御装置は、前記出力変数で示される前記予測波形に基づいて前記電圧重畳装置が印加する電圧を制御する
発電システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、発電システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1の発電システムは、風力発電装置、収音器、スピーカ、及び制御回路を備えている。風力発電装置は、風車及び発電機を備えている。収音器は、風力発電装置で発生した騒音を取得する。制御回路は、収音器が取得した騒音の波形を、逆位相の波形に変換する。そして、制御回路は、逆位相の波形の音をスピーカから風力発電装置に向けて出力する。その結果、スピーカから出力された音により風力発電装置で発生した騒音の一部が打ち消される。
【先行技術文献】
【特許文献】
【0003】
特開2014-227977号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のような発電システムでは、風力発電装置の風車に衝突する風の風速が変化すると、その後に風車の回転速度及び発電機の回転軸の回転速度が変化する。そして、回転軸の回転速度に応じて風力発電装置で発生する騒音の波形が変化する。このような騒音の波形の変化に、制御回路による波形の変換処理が追従できないと、風力発電装置で発生する騒音を十分に抑制できないおそれがある。
【課題を解決するための手段】
【0005】
上記課題を解決するための発電システムは、風車及び発電機を有する風力発電装置と、前記発電機が出力する交流電圧のうちのノイズ成分の波形に対して、逆位相の波形の電圧を印加する電圧重畳装置と、前記電圧重畳装置を制御する制御装置と、前記ノイズ成分の波形を予測する予測装置と、を備える発電システムであって、前記予測装置は、実行装置と、記憶装置と、を備え、前記記憶装置は、複数の入力変数が入力されることにより、予め定められた一定時間後の前記ノイズ成分の予測波形を示す出力変数を出力する写像を規定する写像データを記憶しており、前記写像は、予め機械学習により学習されたものであり、前記写像は、前記入力変数の1つとして、前記風車に衝突する風の風速を示す変数を含み、前記実行装置は、前記入力変数を取得する取得処理と、前記取得処理により取得した複数の前記入力変数を前記写像に入力することによって、前記出力変数の値を出力する算出処理と、を実行し、前記制御装置は、前記出力変数で示される前記予測波形に基づいて前記電圧重畳装置が印加する電圧を制御する。
【0006】
上記構成によれば、発電機が出力する交流電圧のうちのノイズ成分の波形に対して逆位相の波形の電圧を印加することにより、発電機が出力する交流電圧が理想的な正弦波に近づく。そのため、発電機の回転軸が滑らかに回転するので、発電機が発する騒音を抑制できる。そして、上記の逆位相の波形の電圧は、一定時間後のノイズ成分の予測波形に基づいて生成される。このように、一定時間後のノイズ成分の予測波形を把握できれば、例えば制御装置において制御遅れ等が生じ得る状況であっても、発電機が出力する交流電圧の変化に追従して電圧重畳装置が印加する電圧を制御できる。
【図面の簡単な説明】
【0007】
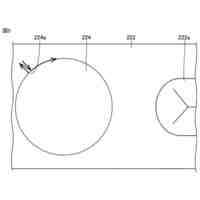
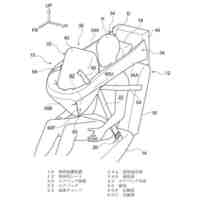
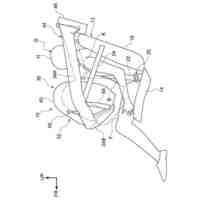
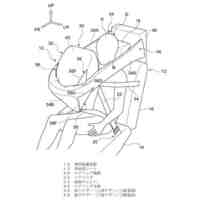
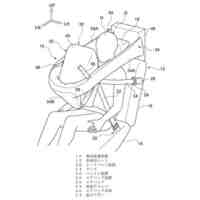
発電システムの概略構成図である。
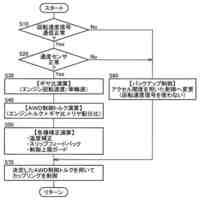
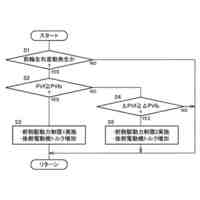
予測制御を示すフローチャートである。
【発明を実施するための形態】
【0008】
<発電システムの概略構成>
以下、本発明の一実施形態を図1及び図2にしたがって説明する。先ず、発電システム100の概略構成について説明する。
【0009】
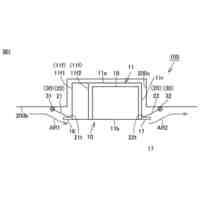
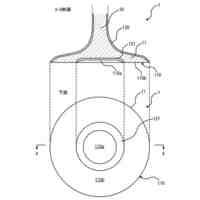
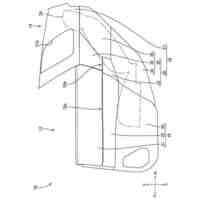
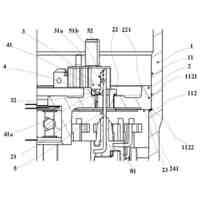
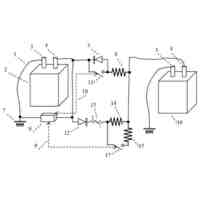
図1に示すように、発電システム100は、風力発電装置10、電圧重畳装置30、及び制御装置40を備えている。
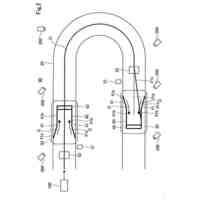
風力発電装置10は、タワー11、ナセル12、及び風車13を備えている。また、風力発電装置10は、増速器16、ブレーキ装置17、発電機18、及び電力線19を備えている。風車13は、当該風車13に衝突する風によりナセル12に対して回転可能である。ナセル12は、増速器16、ブレーキ装置17、及び発電機18を収容している。発電機18は、回転軸18Aを備えている。回転軸18Aは、増速器16及びブレーキ装置17を介して風車13に接続している。したがって、風車13が回転すると、その回転が増速器16で増速されて回転軸18Aに伝えられる。電力線19は、発電機18が発電した電力を図示しない電気設備へと供給する。なお、ブレーキ装置17は、風車13の回転速度が過大になったときに、風車13を減速させる。
【0010】
電圧重畳装置30は、電力線19の途中に位置している。電圧重畳装置30は、発電機18が出力する交流電圧のうちのノイズ成分の波形に対して、逆位相の波形の電圧を印加する。制御装置40は、電圧重畳装置30と互いに通信可能である。制御装置40は、電圧重畳装置30に制御信号を出力することにより、当該電圧重畳装置30を制御する。具体的には、制御装置40は、後述する予測装置90が算出するノイズ成分の予測波形に基づいて、電圧重畳装置30が出力する電圧を制御する。なお、制御装置40は、電圧重畳装置30を介して電力線19における交流電圧を検出可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
運転支援装置
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
車両下部構造
2日前
トヨタ自動車株式会社
データ管理装置
2日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
バルブ及び内燃機関
2日前
トヨタ自動車株式会社
車両の運転支援システム
2日前
トヨタ自動車株式会社
前後輪駆動車両の制御装置
2日前
トヨタ自動車株式会社
車両ボディを塗装する方法
2日前
トヨタ自動車株式会社
車両の回生協調制動制御装置
2日前
トヨタ自動車株式会社
蓄電セルの製造方法及び蓄電セル
2日前
トヨタ自動車株式会社
エアバッグ装置及び乗員保護装置
2日前
トヨタ自動車株式会社
エアバッグ装置及び乗員保護装置
2日前
トヨタ自動車株式会社
エアバッグ装置及び乗員保護装置
2日前
トヨタ自動車株式会社
エアバッグ装置及び乗員保護装置
2日前
トヨタ自動車株式会社
エアバッグ装置及び乗員保護装置
2日前
トヨタ自動車株式会社
エアバッグ装置及び乗員保護装置
2日前
トヨタ自動車株式会社
エアバッグ装置及び乗員保護装置
2日前
トヨタ紡織株式会社
乗物内装構造
2日前
トヨタ自動車株式会社
システム、サーバ、車両および方法
2日前
トヨタ自動車株式会社
情報処理装置、方法、及びプログラム
2日前
トヨタ自動車株式会社
蓄電セル及び蓄電セルの電流遮断方法
2日前
トヨタ自動車株式会社
情報処理装置、及び情報処理プログラム
2日前
株式会社豊田自動織機
燃料電池システム
2日前
トヨタ自動車株式会社
監視システム、監視用コンピュータプログラム及び監視方法
2日前
個人
2軸モーター
1日前
ニデック株式会社
モータ
16日前
個人
バッテリーの補助装置
9日前
ヨツギ株式会社
鳥害防止具
17日前
ニデック株式会社
軸方向界磁モータ
25日前
個人
機械式トルク可変制御型電動機
24日前
個人
磁力のみを動力とするモーター
10日前
株式会社プロテリアル
リニアモータ
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ