TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058617
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2023174077
出願日
2023-10-06
発明の名称
システム、サーバ、車両および方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
30/10 20060101AFI20240418BHJP(車両一般)
要約
【課題】ガイド追従制御を適切に実行することができる技術を提供する。
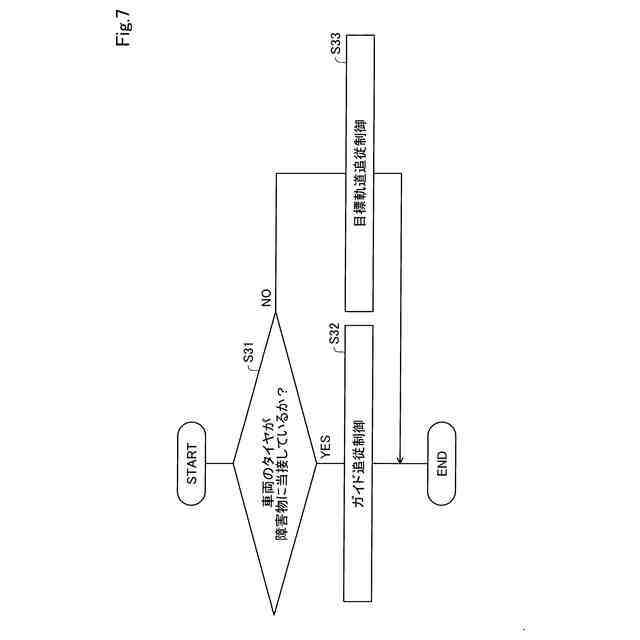
【解決手段】システムは、路面に設けられた凹凸構造を有するガイドを含むガイドエリアに車両が位置しているか否かを判定する位置判定部と、車両の車輪が障害物に当接しているか否かを判定する当接判定部と、位置判定部の判定結果と当接判定部の判定結果とに応じて、車両の走行を制御する制御部と、を備える。制御部は、位置判定部により車両がガイドエリアに位置していないと判定され、かつ、当接判定部により車両の車輪が障害物に当接していると判定された場合に、車両を目標軌道に追従するように走行させ、または、車両を停止させる第1制御を実行し、位置判定部により車両がガイドエリアに位置していると判定され、かつ、当接判定部により車両の車輪が障害物に当接していると判定された場合に、障害物に追従するように車両を走行させる第2制御を実行する。
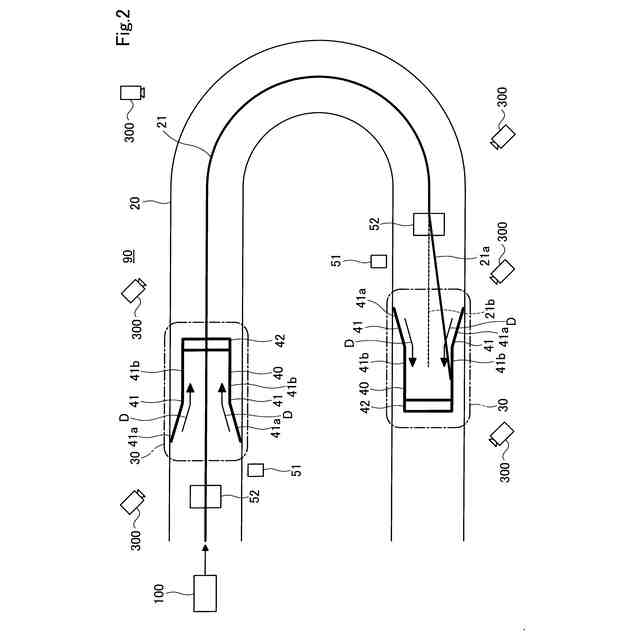
【選択図】図2
特許請求の範囲
【請求項1】
システムであって、
路面に設けられた凹凸構造を有するガイドを含むガイドエリアに車両が位置しているか否かを判定する位置判定部と、
前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定部と、
前記位置判定部の判定結果と前記当接判定部の判定結果とに応じて、前記車両の走行を制御する制御部と、
を備え、
前記制御部は、
前記位置判定部により前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、
前記位置判定部により前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する、
システム。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載のシステムであって、
前記車両の車輪が前記ガイドから受ける荷重の方向に基づいて、前記ガイドの誘導方向を判定する方向判定部を更に備え、
前記制御部は、前記誘導方向に沿うように前記車両を走行させる、システム。
【請求項3】
請求項2に記載のシステムであって、
前記制御部は、前記誘導方向が前記目標軌道と異なる場合に、前記誘導方向に沿うように前記目標軌道を修正する、システム。
【請求項4】
請求項1に記載のシステムであって、
前記位置判定部は、前記車両の前方カメラの撮像画像に基づいて、前記ガイドエリアに対応する看板又は前記ガイドエリアに対応する路面表示の認識結果から前記車両が前記ガイドエリアに位置しているか否かを判定する、システム。
【請求項5】
サーバであって、
路面に設けられた凹凸構造を有するガイドを含むガイドエリアに車両が位置しているか否かを判定する位置判定部と、
前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定部と、
前記位置判定部の判定結果と前記当接判定部の判定結果とに応じて、前記車両の走行を遠隔制御する遠隔制御部と、
を備え、
前記遠隔制御部は、
前記位置判定部により前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、
前記位置判定部により前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する、
サーバ。
【請求項6】
車両であって、
路面に設けられた凹凸構造を有するガイドを含むガイドエリアに前記車両が位置しているか否かを判定する位置判定部と、
前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定部と、
前記位置判定部の判定結果と前記当接判定部の判定結果とに応じて、前記車両の走行を制御する走行制御部と、
を備え、
前記走行制御部は、
前記位置判定部により前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、
前記位置判定部により前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する、
車両。
【請求項7】
方法であって、
路面に設けられた凹凸構造を有するガイドを含むガイドエリアに車両が位置しているか否かを判定する位置判定工程と、
前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定工程と、
前記位置判定工程の判定結果と前記当接判定工程の判定結果とに応じて、前記車両の走行を制御する制御工程と、
を備え、
前記制御工程では、
前記位置判定工程において前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定工程において前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、
前記位置判定工程において前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定工程において前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する、
方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、システム、サーバ、車両および方法に関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
従来、自動運転システムに関する技術文献として、特開2001-265438号公報が知られている。特開2001-265438号公報には、ガイド誘導区間及び走行ルートに関する情報を含むマップデータが車両の記憶装置に格納されており、走行ルートから逸脱しないように車両を制御する技術が示されている。
【先行技術文献】
【特許文献】
【0003】
特開2001-265438号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来技術のようにマップデータが車両の記憶装置に格納されている場合には、マップデータに含まれるガイドに関する情報の簡略化が求められる場合がある。しかし、ガイドに関する情報が簡略化されると、ガイドに追従するように車両を走行させるガイド追従制御を適切に実行することが困難になるおそれがある。
【0005】
本開示は、ガイド追従制御を適切に実行することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示は、以下の形態として実現することが可能である。
【0007】
(1)本開示の第1の形態によれば、システムが提供される。このシステムは、路面に設けられた凹凸構造を有するガイドを含むガイドエリアに車両が位置しているか否かを判定する位置判定部と、前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定部と、前記位置判定部の判定結果と前記当接判定部の判定結果とに応じて、前記車両の走行を制御する制御部と、を備える。前記制御部は、前記位置判定部により前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、前記位置判定部により前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する。
この形態のシステムによれば、車両をガイドに追従するように走行させることができる。
(2)上記形態のシステムは、前記車両の車輪が前記ガイドから受ける荷重の方向に基づいて、前記ガイドの誘導方向を判定する方向判定部を更に備え、前記制御部は、前記誘導方向に沿うように前記車両を走行させてもよい。
この形態のシステムによれば、車両をガイドの誘導方向に沿って走行させることができる。
(3)上記形態のシステムにおいて、前記制御部は、前記誘導方向が前記目標軌道と異なる場合に、前記誘導方向に沿うように前記目標軌道を修正してもよい。
この形態のシステムによれば、車両がガイドから逸脱して走行することを抑制できる。
(4)上記形態のシステムにおいて、前記位置判定部は、前記車両の前方カメラの撮像画像に基づいて、前記ガイドエリアに対応する看板又は前記ガイドエリアに対応する路面表示の認識結果から前記車両が前記ガイドエリアに位置しているか否かを判定してもよい。
この形態のシステムによれば、車両がガイドエリアに位置しているか否かを簡単に判定することができる。
(5)本開示の第2の形態によれば、サーバが提供される。このサーバは、路面に設けられた凹凸構造を有するガイドを含むガイドエリアに車両が位置しているか否かを判定する位置判定部と、前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定部と、前記位置判定部の判定結果と前記当接判定部の判定結果とに応じて、前記車両の走行を遠隔制御する遠隔制御部と、を備える。前記遠隔制御部は、前記位置判定部により前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、前記位置判定部により前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する。
この形態のサーバによれば、車両をガイドに追従するように走行させることができる。
(6)本開示の第3の形態によれば、車両が提供される。この車両は、路面に設けられた凹凸構造を有するガイドを含むガイドエリアに前記車両が位置しているか否かを判定する位置判定部と、前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定部と、前記位置判定部の判定結果と前記当接判定部の判定結果とに応じて、前記車両の走行を制御する走行制御部と、を備える。前記走行制御部は、前記位置判定部により前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、前記位置判定部により前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定部により前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する。
この形態の車両によれば、車両をガイドに追従するように走行させることができる。
(7)本開示の第4の形態によれば、方法が提供される。この方法は、路面に設けられた凹凸構造を有するガイドを含むガイドエリアに車両が位置しているか否かを判定する位置判定工程と、前記車両に搭載されている車載センサの検出結果、または、前記車両の外部に位置している外部センサの検出結果を用いて、前記車両の車輪が障害物に当接しているか否かを判定する当接判定工程と、前記位置判定工程の判定結果と前記当接判定工程の判定結果とに応じて、前記車両の走行を制御する制御工程と、を備える。前記制御工程では、前記位置判定工程において前記車両が前記ガイドエリアに位置していないと判定され、かつ、前記当接判定工程において前記車両の車輪が前記障害物に当接していると判定された場合に、前記車両を目標軌道に追従するように走行させ、または、前記車両を停止させる第1制御を実行し、前記位置判定工程において前記車両が前記ガイドエリアに位置していると判定され、かつ、前記当接判定工程において前記車両の車輪が前記障害物に当接していると判定された場合に、前記障害物に追従するように前記車両を走行させる第2制御を実行する。
この形態の方法によれば、車両をガイドに追従するように走行させることができる。
本開示は、システム、サーバ、車両および方法以外の種々の形態で実現することも可能である。例えば、コンピュータプログラム、および、コンピュータプログラムが記録された記録媒体などの形態で実現することができる。
【図面の簡単な説明】
【0008】
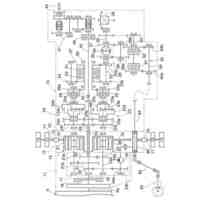
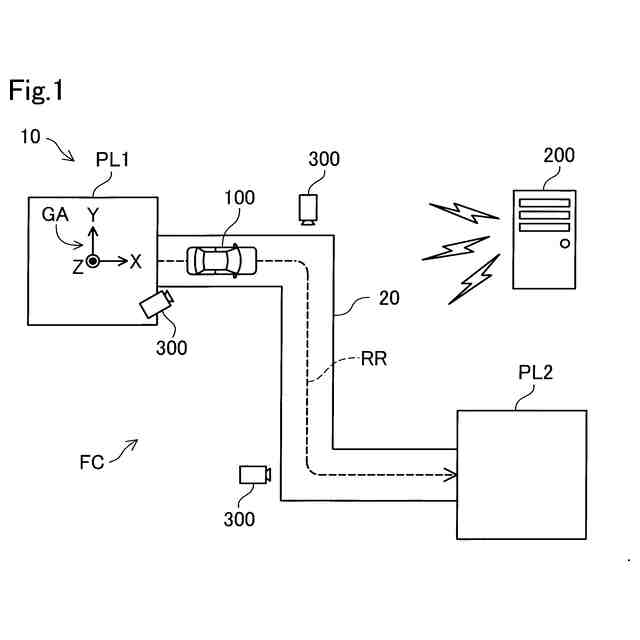
第1実施形態のシステムの構成を示す概念図。
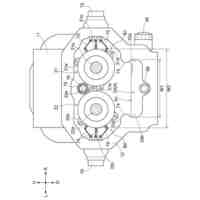
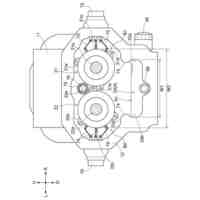
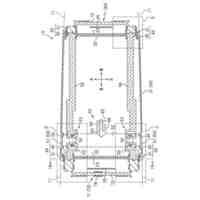
工場敷地を示す説明図。
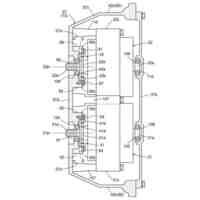
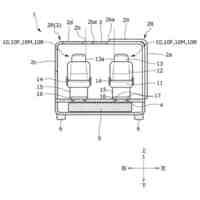
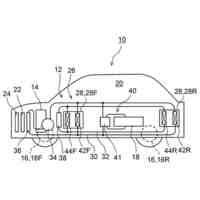
第1実施形態の車両の構成を示す説明図。
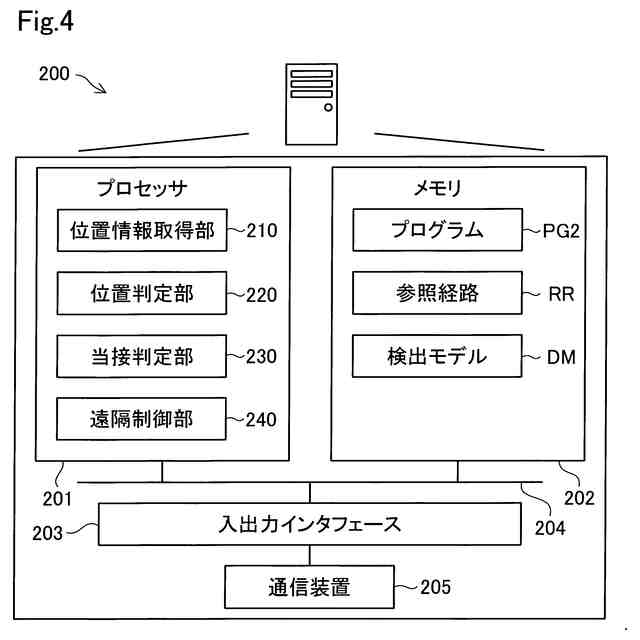
第1実施形態のサーバの構成を示す説明図。
第1実施形態の車両の走行制御の処理手順を示すフローチャート。
位置判定の処理手順を示すフローチャート。
ガイドエリア内制御の処理手順を示すフローチャート。
ガイドエリア外制御の処理手順を示すフローチャート。
第2実施形態のシステムの構成を示す概念図。
第2実施形態の車両の構成を示す説明図。
第2実施形態の車両の走行制御の処理手順を示すフローチャート。
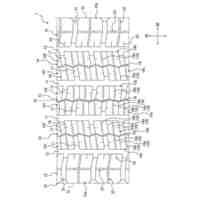
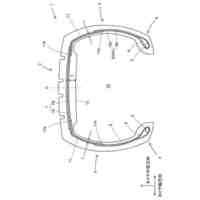
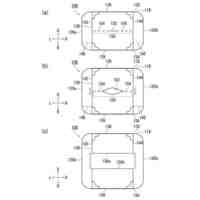
他の実施形態の誘導部の構成を示す説明図。
【発明を実施するための形態】
【0009】
A.第1実施形態:
図1は、第1実施形態におけるシステム10の構成を示す概念図である。図2は、工場FCの敷地90を示す説明図である。図3は、車両100の構成を示す説明図である。図4は、サーバ200の構成を示す説明図である。図1に示すように、本実施形態では、システム10は、車両100と、サーバ200と、少なくとも1つの外部センサ300とを備えている。
【0010】
車両100は、車輪WHによって走行する。本開示では、車輪WHには、無限軌道が含まれる。車両100は、例えば、乗用車、トラック、バス、二輪車、四輪車、戦車、工事用車両などである。車両100は、例えば、ガソリン自動車、ハイブリッド自動車(HEV:Hybrid Electric Vehicle)、電気自動車(BEV:Battery Electric Vehicle)、あるいは、燃料電池自動車(FCEV:Fuel Cell Electric Vehicle)である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
1日前
株式会社クボタ
作業車
1日前
株式会社クボタ
作業車
1日前
株式会社クボタ
作業車
1日前
株式会社アイシン
開閉体支持装置
1日前
豊田合成株式会社
車両用収容装置
1日前
テイ・エス テック株式会社
車両
1日前
株式会社ブリヂストン
タイヤ
1日前
株式会社ブリヂストン
タイヤ
1日前
東海興業株式会社
ルーフモールの製造方法及び製造装置
1日前
日本発條株式会社
車両用シート
1日前
トヨタ紡織株式会社
乗物用収納構造
1日前
トヨタ紡織株式会社
乗物用収納構造
1日前
日産自動車株式会社
車両の制御方法及び車両の制御装置
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
株式会社竹内製作所
作業用車両
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
住友ゴム工業株式会社
空気入りタイヤ
1日前
トヨタ自動車株式会社
自動清掃システム
1日前
日本発條株式会社
シートバックの保持構造
1日前
トヨタ自動車株式会社
管理システム
1日前
トヨタ自動車株式会社
車輪状態取得システム
1日前
オートリブ ディベロップメント エービー
車両用エアバッグ装置
1日前
パナソニックオートモーティブシステムズ株式会社
入力装置
1日前
トヨタ自動車株式会社
車両の熱管理システム
1日前
株式会社小糸製作所
車両用前照灯
今日
ソフトバンクグループ株式会社
情報処理装置及びプログラム
1日前
ソフトバンクグループ株式会社
情報処理装置及びプログラム
1日前
ソフトバンクグループ株式会社
情報処理装置及びプログラム
1日前
トヨタ自動車株式会社
空調制御装置および空調制御プログラム
1日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ