TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024036592
公報種別
公開特許公報(A)
公開日
2024-03-15
出願番号
2024016987,2023087918
出願日
2024-02-07,2020-09-28
発明の名称
飛翔体対応システム及びデータ中継衛星
出願人
三菱電機株式会社
代理人
弁理士法人クロスボーダー特許事務所
主分類
B64G
1/10 20060101AFI20240308BHJP(航空機;飛行;宇宙工学)
要約
【課題】少ない衛星数で全球常時監視が可能であり、空間分解能及び監視性能のような監視性能の高い監視システムを提供する。
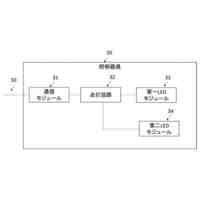
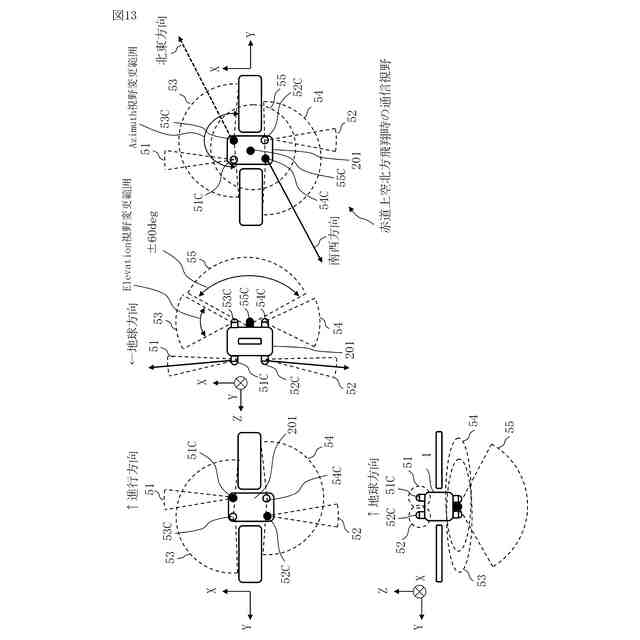
【解決手段】通信衛星201は、赤道上空北方通過の際、前方衛星と光通信する第一の光通信装置51Cと、後方衛星と光通信する第二の光通信装置52Cと、東側隣接軌道の北東を飛翔する衛星と光通信する第三の光通信装置53Cと、西側隣接軌道の南西を飛翔する衛星と光通信する第四の光通信装置54Cと、-Z方向に指向し監視衛星100と通信する通信装置55Cとを有する。第三の光通信装置53CのAzimuth通信視野は、+X軸の方向に対して±90度以上である。第四の光通信装置54CのAzimuth通信視野は、-X方向に対して±90度以上である。通信装置55Cの監視衛星100との通信視野が、-Z方向に対して+X軸のまわりに±60度以上、+Y軸のまわりに±60度以上である。
【選択図】図13
特許請求の範囲
【請求項1】
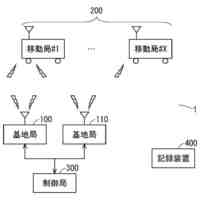
軌道高度2000km以上の赤道上空を飛翔する第一のデータ中継衛星と、
軌道高度2000km以上の極軌道を飛翔する第二のデータ中継衛星と、
軌道高度2000km以下を飛翔する複数の監視衛星と、
を備え、
前記複数の監視衛星である監視衛星群が、
地上から発射されて飛翔する飛翔体の監視情報を取得し、前記データ中継衛星を経由して前記監視情報を伝送する飛翔体対応システム。
続きを表示(約 1,600 文字)
【請求項2】
前記飛翔体対応システムは、さらに、
大気圏の空域ないし陸上ないし海上を移動する対処装置と、
地上に固定された対処装置と、
の少なくともいずれかを備え、
前記複数の監視衛星である監視衛星群は、
前記データ中継衛星を経由して前記対処装置に前記監視情報を伝送し、
前記対処装置が、
伝送された前記監視情報を用いて、前記飛翔体に対する対処行動を実施する請求項1に記載の飛翔体対応システム。
【請求項3】
3機以上の前記第一のデータ中継衛星と、
3機以上の前記第二のデータ中継衛星と、
を備える請求項1または請求項2に記載の飛翔体対応システム。
【請求項4】
前記第一のデータ中継衛星同士と、前記第二のデータ中継衛星同士と、前記第一のデータ中継衛星と前記第二のデータ中継衛星同士とのうちの少なくともいずれかが、
光通信する請求項1から請求項3のいずれか一項に記載の飛翔体対応システム。
【請求項5】
前記データ中継衛星と前記監視衛星とが、電波通信し、
前記データ中継衛星と前記対処装置とが、電波通信する、
請求項2に記載の飛翔体対応システム。
【請求項6】
前記データ中継衛星と前記監視衛星とが、電波通信し、
前記データ中継衛星と前記対処装置とが、光通信し、
前記対処装置同士が前記監視情報を通信回線経由で伝送する、
請求項2に記載の飛翔体対応システム。
【請求項7】
前記データ中継衛星と前記監視衛星とが、光通信し、
前記データ中継衛星と前記対処装置とが、光通信し、
前記対処装置同士が、前記監視情報を通信回線経由で伝送する、
請求項2に記載の飛翔体対応システム。
【請求項8】
前記第一のデータ中継衛星と前記第二のデータ中継衛星との少なくとも一方が、
右手直交座標でプラス方向を向く+X軸の方向をデータ中継衛星の衛星進行方向+X、
右手直交座標でプラス方向を向く+Z軸の方向をデータ中継衛星の地心方向+Zとした場合に、
前記+Z軸の方向に対してAzimuthに360度、
及び、前記+X軸に対して前記+Z軸の方向に0度から80度のElevationの視野方向変更ができる光通信装置
を備える請求項1から請求項7のいずれか一項に記載の飛翔体対応システム。
【請求項9】
前記第一のデータ中継衛星と前記第二のデータ中継衛星との少なくとも一方が、
右手直交座標でプラス方向を向く+X軸の方向をデータ中継衛星の衛星進行方向+X、
右手直交座標でプラス方向を向く+Z軸の方向をデータ中継衛星の地心方向+Zとした場合に、
前記+Z軸に対してAzimuthに360度、
及び
前記+X軸に対して前記+Z軸の方向に0度から70度のElevationの視野方向変更ができる光通信装置
を備える請求項1から請求項7のいずれか一項に記載の飛翔体対応システム。
【請求項10】
前記第一のデータ中継衛星と前記第二のデータ中継衛星との少なくとも一方が、
右手直交座標でプラス方向を向く+X軸の方向をデータ中継衛星の衛星進行方向+X、
右手直交座標でプラス方向を向く+Z軸の方向をデータ中継衛星の地心方向+Zとした場合に、
前記+Z軸に対してAzimuthに360度、
及び、
前記+X軸に対して前記+Z軸の方向に0度から60度のElevationの視野方向変更ができる光通信装置
を備える請求項1から請求項7のいずれか一項に記載の飛翔体対応システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、地球を監視する監視システム、衛星情報を伝送する衛星情報伝送システム、飛翔体に対応する飛翔体対応システム及びデータ中継装置に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
従来では衛星コンステレーションを用いた監視システムがある(例えば特許文献1)。傾斜軌道コンステレーションでは、少ない衛星数で中緯度帯を常時監視できるシステムを構築できるというメリットがある。地球周縁を指向して、飛翔体が発射された後の温度を検知して追跡する監視衛星では、地球周縁を地心方向に対して全周に渡りリング状に監視する監視装置があれば、少ない衛星数で全球監視することも可能となる。
【0003】
HGV(Hypersonic Guided Vehicle)と呼ばれる新しい飛翔体では、発射における噴射終了後の追跡のために、温度上昇した機体を赤外線で検知することが有効な手段となる。この場合、背景信号が雑音とならないためには、宇宙を背景とする地球周縁監視が有効である。原理的には魚眼カメラにより全周をリング状に監視できるが、魚眼カメラでは、空間分解能及び監視性能などの制約があるという課題がある。
【先行技術文献】
【特許文献】
【0004】
国際公開第2017/175696号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0005】
本開示は、少ない衛星数で全球常時監視が可能であり、空間分解能及び監視性能の高い監視システムの提供を目的とする。
【課題を解決するための手段】
【0006】
本開示に係る飛翔体対応システムは、
軌道高度2000km以上の赤道上空を飛翔する第一のデータ中継衛星と、
軌道高度2000km以上の極軌道を飛翔する第二のデータ中継衛星と、
軌道高度2000km以下を飛翔する複数の監視衛星と、
を備え、
前記複数の監視衛星である監視衛星群が、
地上から発射されて飛翔する飛翔体の監視情報を取得し、前記データ中継衛星を経由して前記監視情報を伝送する。
【発明の効果】
【0007】
本開示によれば、少ない衛星数で全球常時監視が可能であり、空間分解能及び監視性能の高い監視システムの提供を提供できる。
【図面の簡単な説明】
【0008】
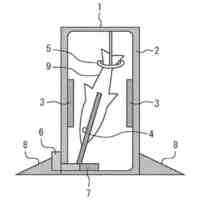
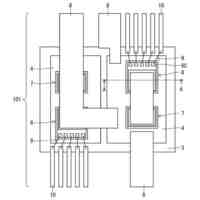
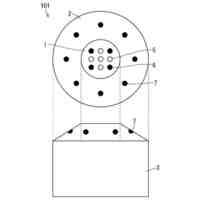
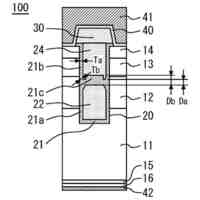
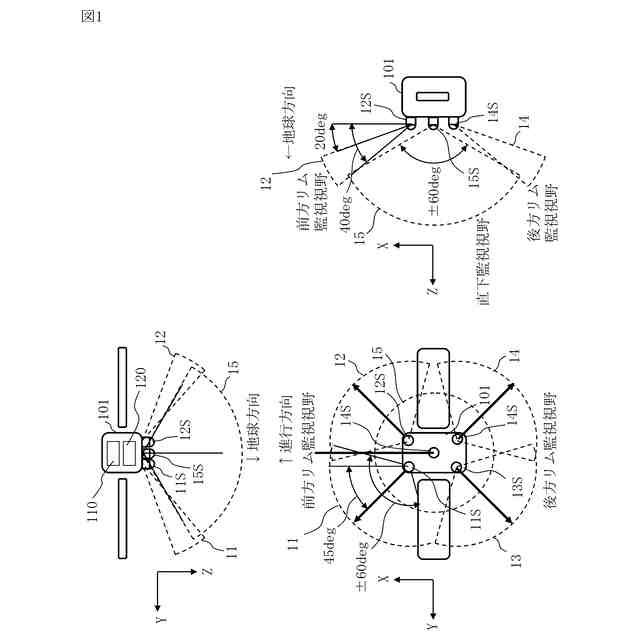
実施の形態1の図で、監視システム501の備える監視衛星101の3面図。
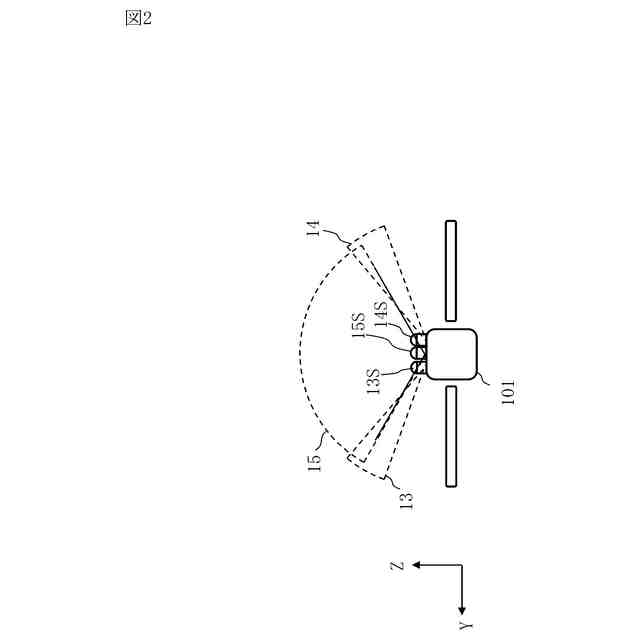
実施の形態1の図で、監視衛星101をYZ平面でみた図。
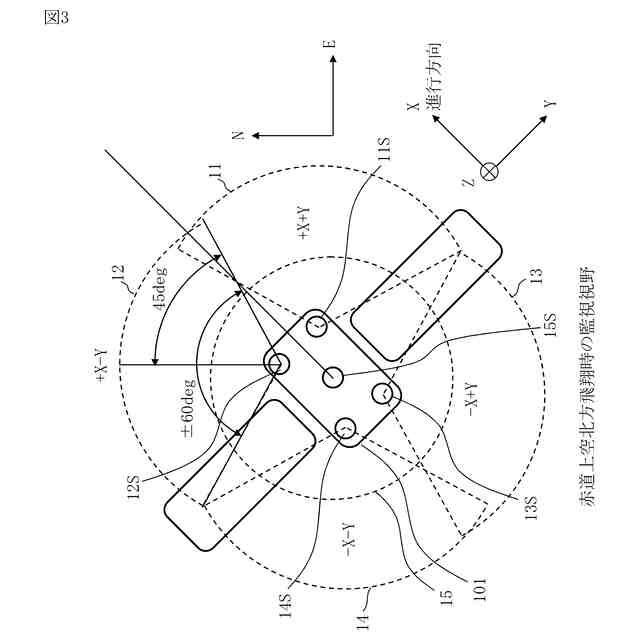
実施の形態1の図で、監視衛星101が、赤道上空を北方へ飛翔する際の監視視野を示す図。
実施の形態1の図で、監視衛星101が、赤道上空を南方へ飛翔する際の監視視野を示す図。
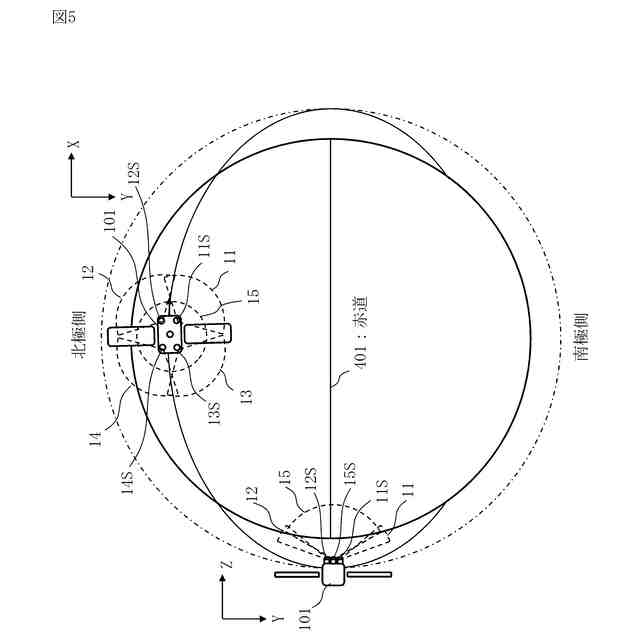
実施の形態1の図で、監視衛星101が赤道上空、及び軌道面の最北端に位置する状態を示す図。
実施の形態1の図で、二つの傾斜軌道のそれぞれを複数の監視衛星101が飛翔する状態を示す図。
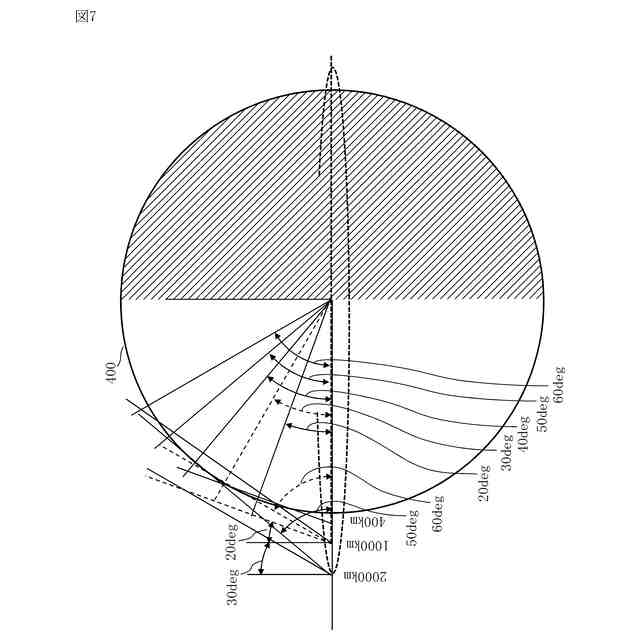
実施の形態1の図で、地球周縁を指向する監視視野の軌道高度と緯度の関係を示す図。
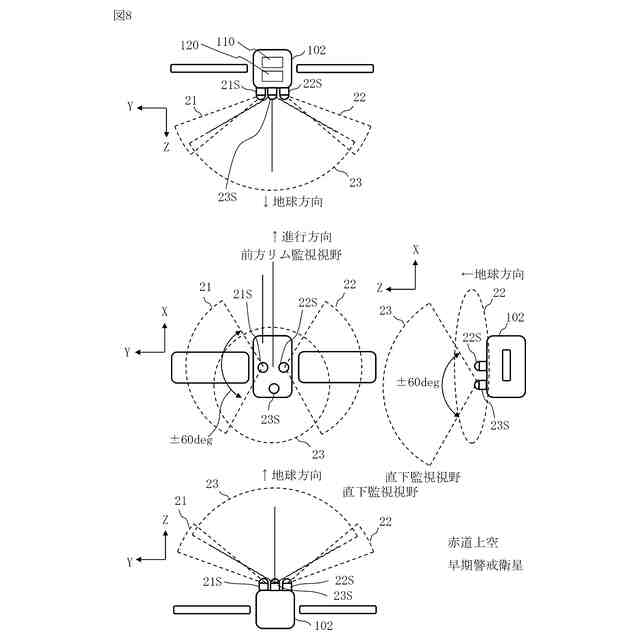
実施の形態1の図で、監視システム502の備える監視衛星102の4面図。
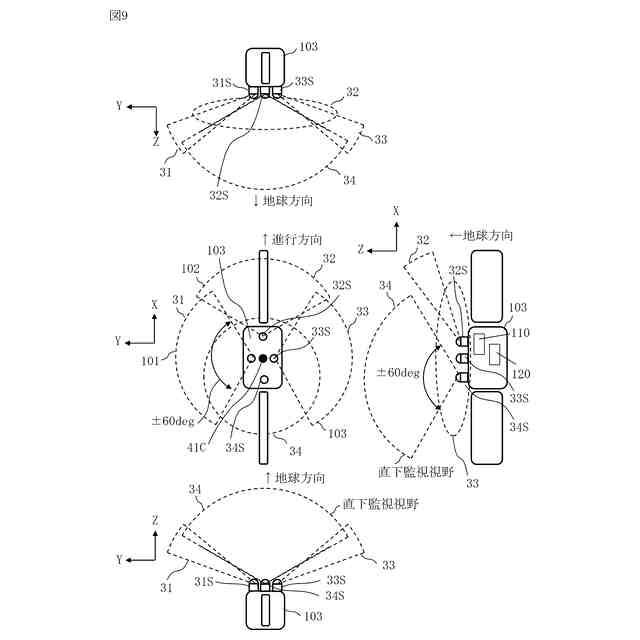
実施の形態1の図で、監視システム503の備える監視衛星103の4面図。
実施の形態1の図で、通信装置41Cを備える監視衛星101を示す図。
実施の形態1の図で、通信装置41Cを備える監視衛星102を示す図。
実施の形態1の図で、通信装置41Cを備える監視衛星103を示す図。
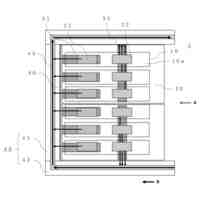
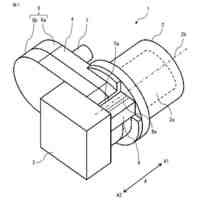
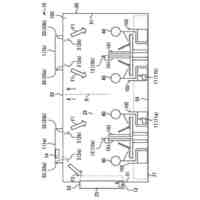
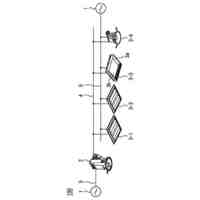
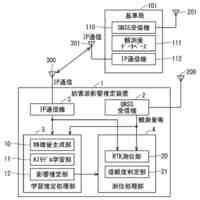
実施の形態1の図で、衛星情報伝送システム600の備える通信衛星201の4面図。
実施の形態1の図で、衛星情報伝送システム600の備える通信衛星202の4面図。
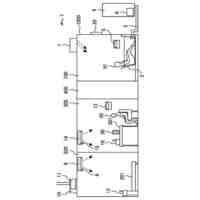
実施の形態1の図で、衛星情報伝送システム600が監視システム501の衛星情報を伝送することを示す図。
実施の形態1の図で、衛星情報伝送システム600が監視システム502の衛星情報を伝送することを示す図。
実施の形態1の図で、衛星情報伝送システム600が監視システム503の衛星情報を伝送することを示す図。
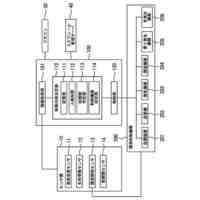
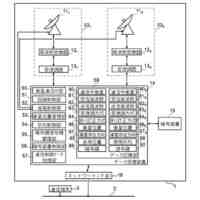
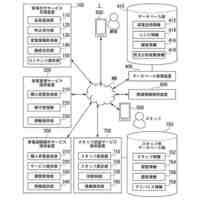
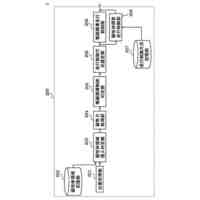
実施の形態2の図で、飛翔体対応システム700を示す図。
実施の形態2の図で、電波通信72の様子を示す図。
実施の形態2の図で、光通信71、電波通信72及び通信回線330を用いた伝送を示す図。
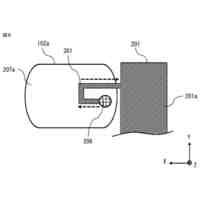
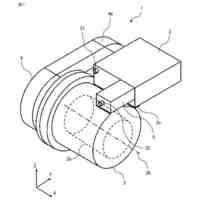
実施の形態2の図で、データ中継衛星211、212が備える光通信装置220CのAzimuth及びElevationの通信視野の変更範囲を示す図。
実施の形態2の図で、第一のデータ中継衛星211と第二のデータ中継衛星212との、光通信装置220Cの通信視野の変更可能の効果を示す図。
実施の形態2の図で、第一のデータ中継衛星211から第二のデータ中継衛星212への、光通信装置220Cの通信視野の変更を示す図。
実施の形態2の図で、Azimuthに360度、及び、0度から70度のElevationの通信視野方向の変更ができることを示す図。
実施の形態2の図で、Azimuthに360度、及び、0度から60度のElevationの通信視野方向の変更ができることを示す図。
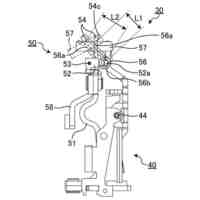
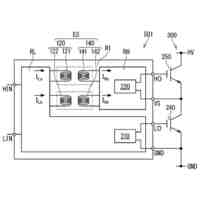
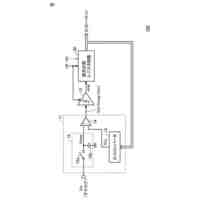
実施の形態2の図で、第一のデータ中継衛星211、第二のデータ中継衛星212の備える通信装置230Cに関する図。
実施の形態2の図で、+Z軸に対して+X軸のまわりに±20度、及び+Z軸に対して+Y軸のまわりに±20度の通信視野の変更可能を示す図。
実施の形態2の図で、+Z軸に対して+X軸のまわりに±30度、及び+Z軸に対して+Y軸のまわりに±30度の通信視野の変更可能を示す図。
実施の形態2の図で、6機のデータ中継衛星を配備した場合、極域が六角形で示される通信不能領域となることを示す図。
実施の形態2の図で、太陽同期条件を維持する軌道高度と軌道傾斜とを示す図。
実施の形態3の図で、第二の監視装置による監視を概念的に示す図。
実施の形態3の図で、第一の監視装置の網羅性を示す図。
実施の形態3の図で、第一の監視装置の網羅性を示す別の図。
実施の形態3の図で、極軌道衛星の監視範囲の模式図。
実施の形態3の図で、極軌道衛星の監視範囲の模式図。
実施の形態3の図で、第一の監視装置の網羅性を示す図。
実施の形態3の図で、第二の監視装置の網羅性を説明する図。
実施の形態3の図で、第二の監視装置の網羅性を説明する別の図。
実施の形態3の図で、極軌道衛星を示す図。
実施の形態3の図で、極軌道衛星を示す別の図。
実施の形態3の図で、傾斜軌道衛星における第二の監視装置の視野を示す図。
実施の形態3の図で、傾斜軌道衛星における第二の監視装置の視野を示す別の図。
実施の形態3の図で、第二の監視装置による全球網羅性を示す図。
実施の形態3の図で、軌道緯度と地球接線との関係を示す図。
実施の形態3の図で、軌道緯度と地球接線との関係を示す別の図。
【発明を実施するための形態】
【0009】
以下、実施の形態について、図を用いて説明する。なお、各図中、同一または相当する部分には、同一符号を付している。実施の形態の説明において、同一または相当する部分については、説明を適宜省略または簡略化する。
【0010】
実施の形態1.
***構成の説明***
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
送信機
19日前
三菱電機株式会社
照明器具
4日前
三菱電機株式会社
回路遮断器
14日前
三菱電機株式会社
加熱調理器
13日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
電力変換器
14日前
三菱電機株式会社
半導体装置
12日前
三菱電機株式会社
制御システム
20日前
三菱電機株式会社
電動駆動装置
5日前
三菱電機株式会社
電動駆動装置
5日前
三菱電機株式会社
監視システム
12日前
三菱電機株式会社
照明制御システム
13日前
三菱電機株式会社
車両位置推定装置
12日前
三菱電機株式会社
空気調和システム
12日前
三菱電機株式会社
空調制御システム
4日前
三菱電機株式会社
ピックアップステージ
4日前
三菱電機株式会社
アナログデジタル変換器
12日前
三菱電機株式会社
通信装置および通信方法
11日前
三菱電機株式会社
半導体装置、電力変換装置
4日前
三菱電機株式会社
トランスおよび電力変換装置
5日前
三菱電機株式会社
半導体装置及びその製造方法
13日前
三菱電機株式会社
運転制御装置及び運転制御方法
4日前
三菱電機株式会社
降圧型定電流回路及び点灯装置
11日前
三菱電機株式会社
移動体、および隊列走行システム
12日前
三菱電機株式会社
加熱調理器及び加熱調理システム
4日前
三菱電機株式会社
回転電機の電機子および回転電機
6日前
三菱電機株式会社
照明器具および照明制御システム
20日前
三菱電機株式会社
測定装置、測定システム及び炊飯器
14日前
三菱電機株式会社
照明制御システムおよび照明制御装置
14日前
三菱電機株式会社
無線通信システム、および、学習装置
4日前
三菱電機株式会社
照明制御システムおよび照明制御装置
14日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
19日前
三菱電機株式会社
通信装置、通信システム、および通信方法
5日前
三菱電機株式会社
家事代行支援システム、および家事代行支援方法
18日前
三菱電機株式会社
妨害波影響推定システムおよび妨害波影響推定方法
19日前
三菱電機株式会社
走行制御装置、自動運転システム及び走行制御方法
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ