TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024056257
公報種別
公開特許公報(A)
公開日
2024-04-23
出願番号
2022163005
出願日
2022-10-11
発明の名称
走行制御装置、自動運転システム及び走行制御方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/00 20060101AFI20240416BHJP(信号)
要約
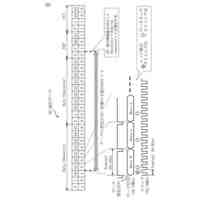
【課題】磁性体が設けられた規定走行経路上を自動走行するための走行制御が可能な走行制御装置を得る。
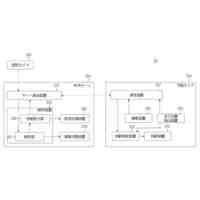
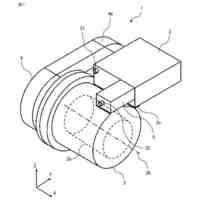
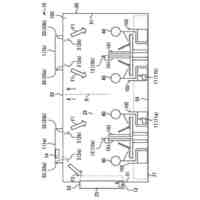
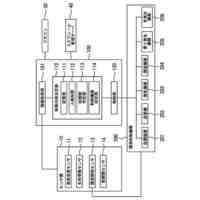
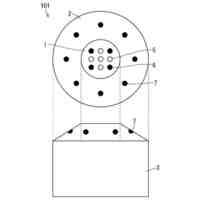
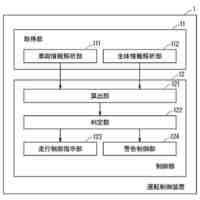
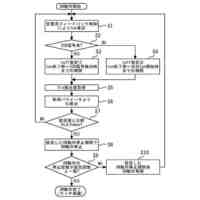
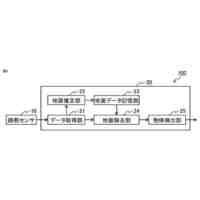
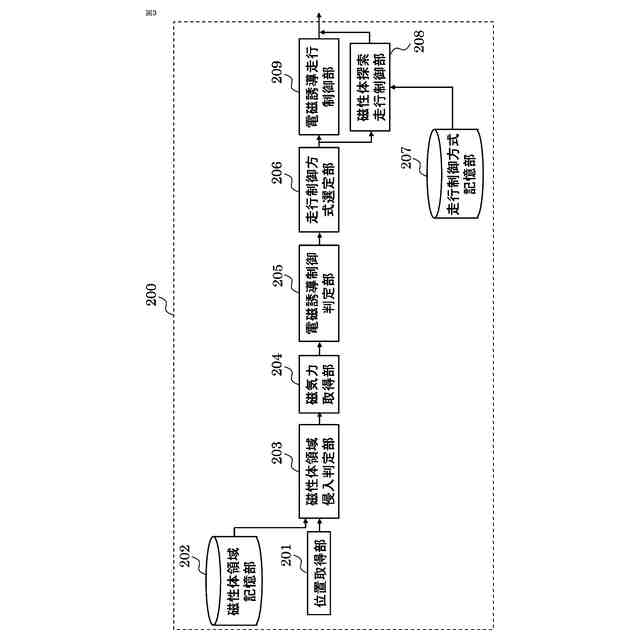
【解決手段】本開示による走行制御装置200は、移動体位置を取得する位置取得部201と、走行面で磁性体104aが埋設された磁性体領域103を記憶する磁性体領域記憶部202と、移動体位置及び磁性体領域103に基づき移動体の磁性体領域103への侵入可否を判定する磁性体領域侵入判定部203と、侵入の場合に磁性体104aの磁気力を取得する磁気力取得部204と、磁気力に基づき走行制御の可否を判定する電磁誘導制御判定部205と、走行制御が可能な場合は磁気力に基づき走行制御する電磁誘導走行制御部209と、走行制御が可能ではない場合は磁性体104aを探索し、探索された磁性体104aの磁気力に基づき走行制御する磁性体探索走行制御部208と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
移動体の移動体位置を取得する位置取得部と、
前記移動体が走行する走行面において磁性体が設置または埋設された磁性体領域を記憶する磁性体領域記憶部と、
前記移動体位置及び前記磁性体領域に基づき、前記移動体が前記磁性体領域に侵入したか否かを判定する磁性体領域侵入判定部と、
前記移動体が前記磁性体領域に侵入したと判定された場合に、前記磁性体から発生する磁気力を取得する磁気力取得部と、
前記磁気力に基づき前記移動体の走行制御の可否を判定する電磁誘導制御判定部と、
前記磁気力に基づく前記移動体の走行制御が可能であると判定された場合は、前記磁気力に基づき前記移動体の走行制御を実行する電磁誘導走行制御部と、
前記磁気力に基づく前記移動体の走行制御が可能ではないと判定された場合は、前記磁性体を探索し、探索された前記磁性体から発生する磁気力に基づき、前記移動体の走行制御を実行する磁性体探索走行制御部と、
を備える走行制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記電磁誘導制御判定部の判定に基づき、前記移動体の走行制御が可能な場合は前記電磁誘導走行制御部による処理を選択し、前記移動体の走行制御が可能ではない場合は前記磁性体探索走行制御部による処理を選択する走行制御方式選定部をさらに備える請求項1に記載の走行制御装置。
【請求項3】
前記磁性体探索走行制御部は、予め記憶された磁性体探索走行制御方式にしたがい前記磁性体を探索する請求項2に記載の走行制御装置。
【請求項4】
前記磁性体探索走行制御方式を走行制御方式の一つとして記憶する走行制御方式記憶部をさらに備える請求項3に記載の走行制御装置。
【請求項5】
前記移動体の移動体位置の算出に関連する移動体位置関連情報を取得する移動体位置関連情報取得部と、
前記移動体位置関連情報に基づき、前記磁性体から発生する前記磁気力の測位品質を算出する測位品質算出部と、をさらに備え、
前記走行制御方式選定部は、前記測位品質に基づき処理の選定を実行する請求項2から4のいずれか1項に記載の走行制御装置。
【請求項6】
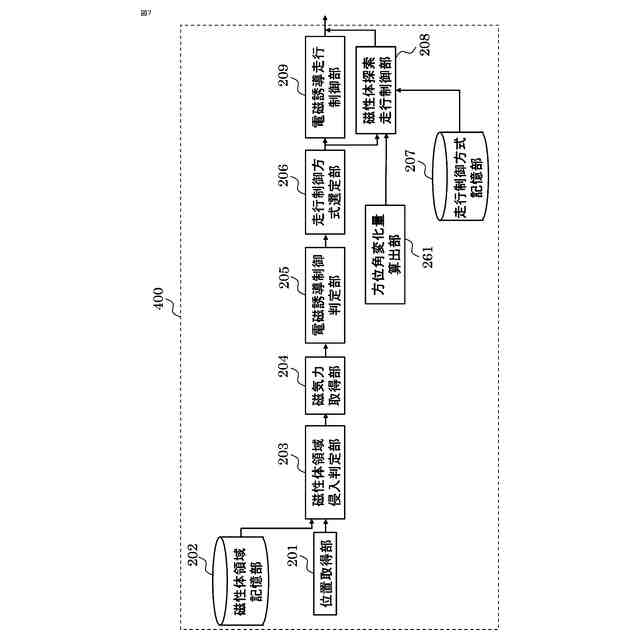
前記移動体の方位角変化量を算出する方位角変化量算出部をさらに備え、
前記走行制御方式記憶部は、移動体方位角を変更可能な方位角変更制御方式を走行制御方式の一つとして記憶し、
前記磁性体探索走行制御部は、算出された制御量が方位角閾値以上となる場合に前記方位角変更制御方式を選択し、
前記走行制御方式選定部は、前記磁性体探索走行制御部において前記方位角変更制御方式が選択された場合は、前記方位角変化量算出部において算出された方位角変化量が方位角閾値未満となるまで前記磁性体探索走行制御部を選択し続ける請求項4に記載の走行制御装置。
【請求項7】
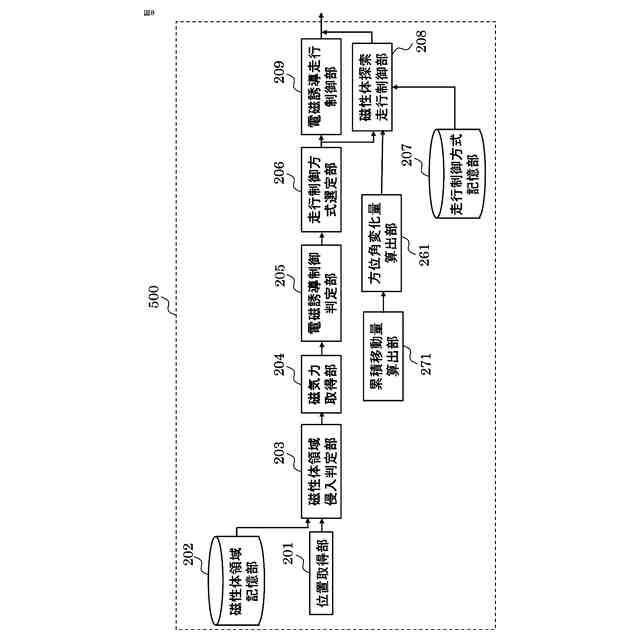
前記磁性体探索走行制御部において算出された制御量を用いた走行制御によって発生する前記移動体の移動量の累積値を算出する累積移動量算出部を有し、
前記磁性体探索走行制御部は、前記移動量の累積値が累積値閾値以上となる場合に前記方位角変更制御方式を選択し、
前記走行制御方式選定部は、前記磁性体探索走行制御部において前記方位角変更制御方式が選択された場合は、前記方位角変化量算出部において算出した方位角変化量が方位角閾値未満となるまで前記磁性体探索走行制御部を選択し続ける請求項6に記載の走行制御装置。
【請求項8】
前記磁性体領域内での前記移動体の規定走行経路情報を記憶する規定走行経路情報記憶部と、
前記磁性体領域内での前記移動体の走行時に前記位置取得部で取得した前記移動体位置と前記規定走行経路情報記憶部に記憶された情報を用いて規定走行経路からの移動体の位置誤差を算出する位置誤差算出部と、をさらに備え、
前記走行制御方式記憶部は、規定走行経路の外部に設置または埋設された磁性体を探索する規定走行経路外磁性体探索走行制御方式を走行制御方式の一つとして記憶し、
前記位置誤差算出部によって算出された前記移動体の前記位置誤差が規定回数連続して位置誤差閾値を超える場合は、前記走行制御方式選定部において前記磁性体探索走行制御部を選択し、前記磁性体探索走行制御部は前記規定走行経路外磁性体探索走行制御方式を選択する請求項4に記載の走行制御装置。
【請求項9】
請求項1から4のいずれか1項に記載の走行制御装置と、
前記移動体の移動体位置を算出する位置算出装置と、
前記走行制御装置から出力される走行制御用の制御量及び前記位置算出装置から出力される移動体位置に基づき、前記移動体の自動運転制御を実行するための目標軌跡及び目標車速を設定する車両制御装置と、
を備える自動運転システム。
【請求項10】
以下の各ステップが処理回路で実行される、磁性体が設置または埋設された磁性体領域を含む走行面を走行する移動体の走行制御方法であって、
前記移動体の移動体位置及び前記磁性体領域に基づき、前記移動体が前記磁性体領域に侵入したか否かを判定するステップと、
前記移動体が前記磁性体領域に侵入したと判定された場合に、前記磁性体から発生する磁気力を取得するステップと、
前記磁気力が磁気閾値以上である場合に、前記移動体の走行制御が可能と判定し、前記磁気力が磁気閾値未満である場合は、前記移動体が前記磁性体を探索するように走行制御し、探索された前記磁性体から発生する磁気力に基づき、前記移動体の走行制御をさらに実行するステップと、
を備える走行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行制御装置、自動運転システム及び走行制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
移動体を規定走行経路上で自動走行させる、つまり走行制御するためには規定走行経路上の各地点で適切な制御量を与える必要がある。規定走行経路上を自動走行するための走行制御に必要な制御量の算出方法として、複数の衛星信号を用いた位置推定の結果と地図上の規定走行軌跡との差を用いる走行制御方法などが挙げられる。また、衛星信号の受信が困難な場所などでの制御量の算出方法として、規定走行経路上に埋設された磁性体から発生する磁気力を用いる走行制御方法、あるいは、規定走行経路上に埋設されたマーカーに関連付けられた情報を用いる走行制御方法などが挙げられる。
【0003】
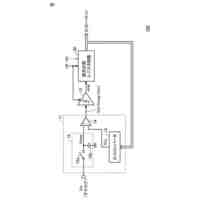
特許文献1に記載のトンネル内無軌道走行車設備では、走行車両は走行経路上に敷設された電磁誘導線から発生する電磁波の強度に応じて電圧を出力する2つのピックアップコイルを搭載し、2つのピックアップコイルの電圧差に応じて走行制御することで規定走行経路上の自動走行を実現している。
【0004】
特許文献2に記載の有人規定ルート自動走行車両では、規定ルートを自動走行する車両の走行経路上にマーカーを埋設し、マーカー取得時の車両走行距離とマーカーに関連づけられた情報から車両の加速、減速を制御しており、車両荷重が変化する場合であっても自動走行車両の速度を適切に制御することを可能としている。
【先行技術文献】
【特許文献】
【0005】
特許第3346620号公報
特許第6864098号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
電磁誘導線などの磁性体が規定走行経路上の複数箇所に断片的に配置されている場合、あるいは自動走行車両が一時的に規定走行経路から離れて走行する必要がある場合などは、自動走行するための情報が走行経路上の一部で得られないため、磁気力を用いた走行制御に必要な制御量の算出方法と、他の手段による走行制御に必要な制御量の算出方法を、適宜切り替えながら走行する必要がある。
【0007】
上述の制御量の算出方法の切り替えにおいて、磁気力を用いた走行制御の制御量の算出方法への切り替えを行う場合、規定走行経路に設置または埋設された磁性体から発生する磁気力を取得可能な位置まで移動体を走行制御して移動させる必要がある。しかしながら、移動体に与える制御量に誤差が生じて磁性体が設置または埋設された規定走行経路から外れた位置に移動体が移動した場合は、移動体は磁気力を取得できなくなるため、磁気力を用いた制御量の算出ができない。この結果、移動体の走行制御の継続が困難となり、規定走行経路上を自動走行できなくなることが課題である。
【0008】
本開示は上記のような問題点を解消するためになされたもので、移動体を規定走行経路上で自動走行可能とする走行制御装置、自動運転システム及び走行制御方法を得ることを目的とする。
【課題を解決するための手段】
【0009】
本開示による走行制御装置は、
移動体の移動体位置を取得する位置取得部と、
前記移動体が走行する走行面において磁性体が設置または埋設された磁性体領域を記憶する磁性体領域記憶部と、
前記移動体位置及び前記磁性体領域に基づき、前記移動体が前記磁性体領域に侵入したか否かを判定する磁性体領域侵入判定部と、
前記移動体が前記磁性体領域に侵入したと判定された場合に、前記磁性体から発生する磁気力を取得する磁気力取得部と、
前記磁気力に基づき前記移動体の走行制御の可否を判定する電磁誘導制御判定部と、
前記磁気力に基づく前記移動体の走行制御が可能であると判定された場合は、前記磁気力に基づき前記移動体の走行制御を実行する電磁誘導走行制御部と、
前記磁気力に基づく前記移動体の走行制御が可能ではないと判定された場合は、前記磁性体を探索し、探索された前記磁性体から発生する磁気力に基づき、前記移動体の走行制御を実行する磁性体探索走行制御部と、
を備える。
【0010】
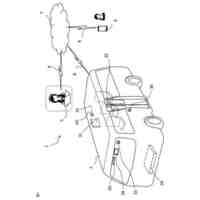
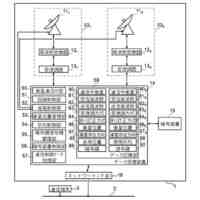
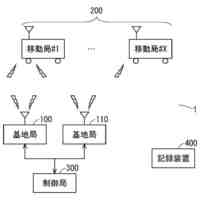
本開示による自動運転システムは、
上述の走行制御装置と、
前記移動体の移動体位置を算出する位置算出装置と、
前記走行制御装置から出力される走行制御用の制御量及び前記位置算出装置から出力される移動体位置に基づき、前記移動体の自動運転制御を実行するための目標軌跡及び目標車速を設定する車両制御装置と、
を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
照明器具
10日前
三菱電機株式会社
表示装置
3日前
三菱電機株式会社
半導体装置
10日前
三菱電機株式会社
加熱調理器
19日前
三菱電機株式会社
半導体装置
18日前
三菱電機株式会社
回路遮断器
20日前
三菱電機株式会社
電力変換装置
3日前
三菱電機株式会社
監視システム
18日前
三菱電機株式会社
電力変換装置
4日前
三菱電機株式会社
電動駆動装置
11日前
三菱電機株式会社
電動駆動装置
11日前
三菱電機株式会社
移動体制御装置
4日前
三菱電機株式会社
自動運転システム
4日前
三菱電機株式会社
空気調和システム
18日前
三菱電機株式会社
車両位置推定装置
18日前
三菱電機株式会社
照明制御システム
19日前
三菱電機株式会社
空調制御システム
10日前
三菱電機株式会社
回転電機の制御装置
3日前
三菱電機株式会社
ピックアップステージ
10日前
三菱電機株式会社
アナログデジタル変換器
18日前
三菱電機株式会社
通信装置および通信方法
17日前
三菱電機株式会社
半導体装置、電力変換装置
10日前
三菱電機株式会社
トランスおよび電力変換装置
11日前
三菱電機株式会社
半導体装置及びその製造方法
19日前
三菱電機株式会社
運転制御装置及び運転制御方法
10日前
三菱電機株式会社
降圧型定電流回路及び点灯装置
17日前
三菱電機株式会社
回転電機の電機子および回転電機
12日前
三菱電機株式会社
加熱調理器及び加熱調理システム
10日前
三菱電機株式会社
移動体、および隊列走行システム
18日前
三菱電機株式会社
走行支援システム及び走行支援方法
5日前
三菱電機株式会社
無線通信システム、および、学習装置
10日前
三菱電機株式会社
通信装置、通信システム、および通信方法
11日前
三菱電機株式会社
走行制御装置、自動運転システム及び走行制御方法
12日前
三菱電機株式会社
照明制御システム、サーバ、照明器具及び照明制御方法
19日前
三菱電機株式会社
回転電機のステータおよび回転電機のステータの製造方法
11日前
三菱電機株式会社
物体検出装置、物体検出システムおよび運転支援システム
4日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ