TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024034891
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022139447
出願日
2022-09-01
発明の名称
作業車両
出願人
三菱マヒンドラ農機株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/02 20060101AFI20240306BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】マーカの誤った振り出しを防止する。
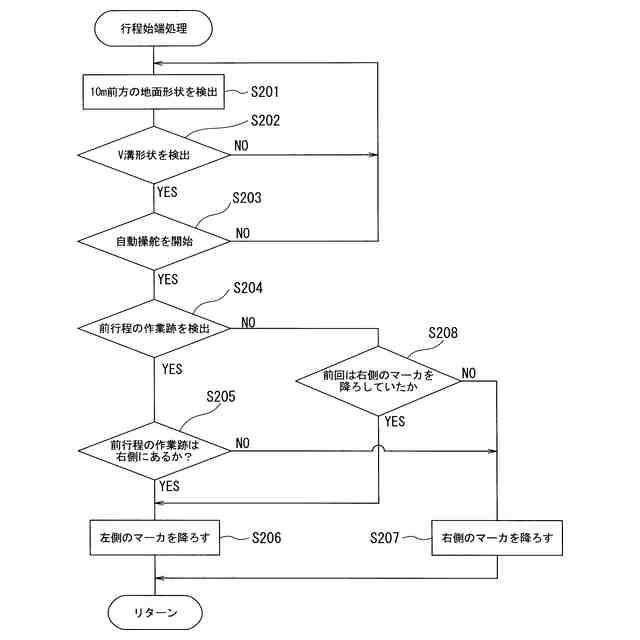
【解決手段】次行程における作業走行の目標となるV溝を圃場に形成する左右のマーカ13L、13Rと、走行機体1をアクチュエータ動力で操舵する操舵ユニット12と、走行機体1の進行方向を撮影するカメラ10と、制御部20と、を備えるトラクタTであって、制御部20は、カメラ10の撮影画像においてV溝を認識するV溝認識手段と、カメラ10の撮影画像において前行程の作業跡を認識する作業跡認識手段と、V溝に沿って作業走行するように操舵ユニット12を制御する自動操舵制御手段と、行程始端位置で左右いずれかのマーカ13L、13Rを自動的に下降させるマーカ制御手段と、を備え、マーカ制御手段は、前行程の作業跡が走行機体1の左右いずれの側にあるかを判断し、作業跡とは逆側のマーカ13L、13Rを下降させる。
【選択図】図7
特許請求の範囲
【請求項1】
圃場を作業走行する走行機体と、
次行程における作業走行の目標となる溝を圃場に形成する左右のマーカと、
左の前記マーカを、圃場に作用しない上昇状態と、前記走行機体の左側に振り出して前記溝を形成する下降状態とに切り換える左マーカ切換手段と、
右の前記マーカを、圃場に作用しない上昇状態と、前記走行機体の右側に振り出して前記溝を形成する下降状態とに切り換える右マーカ切換手段と、
前記走行機体をアクチュエータ動力で操舵する操舵ユニットと、
前記走行機体の進行方向を撮影するカメラと、
制御部と、を備える作業車両であって、
前記制御部は、
前記カメラの撮影画像において前記溝を認識する溝認識手段と、
前記カメラの撮影画像において前行程の作業跡を認識する作業跡認識手段と、
前記溝に沿って作業走行するように前記操舵ユニットを制御する自動操舵制御手段と、
行程始端位置で左右いずれかの前記マーカを自動的に下降させるマーカ制御手段と、を備え、
前記マーカ制御手段は、前記作業跡が前記走行機体の左右いずれの側にあるかを判断し、前記作業跡とは逆側の前記マーカを下降させることを特徴とする作業車両。
続きを表示(約 170 文字)
【請求項2】
前記マーカ制御手段は、行程始端位置で前記溝を認識し、前記自動操舵制御を開始してから前記マーカを下降させることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記マーカ制御手段は、行程終端位置での機体旋回操作に応じて前記マーカを自動的に上昇させることを特徴とする請求項1又は2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクタなどの作業車両に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
次行程における作業走行の目標となる溝を圃場に形成する左右のマーカと、左のマーカを、圃場に作用しない上昇状態と、走行機体の左側に振り出して溝を形成する下降状態とに切り換える左マーカ切換手段と、右のマーカを、圃場に作用しない上昇状態と、走行機体の右側に振り出して溝を形成する下降状態とに切り換える右マーカ切換手段と、行程始端位置で左右いずれかのマーカを自動的に下降させるマーカ制御手段と、を備える作業車両が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-166号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の作業車両では、次行程側のマーカが自動的に振り出されるように、作業機の昇降操作に連動してマーカの振り出し方向を交互に切換えていたため、行程終端の旋回時以外に作業機を昇降操作すると、意図せずにマーカの振り出し方向が切り換わってしまう可能性がある。このような場合には、前行程の作業跡(例えば、畝立て跡)に不要な溝が形成される可能性があるだけでなく、マーカの振り出し方向を再度切り換えるための操作が必要になる。
【課題を解決するための手段】
【0005】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、請求項1の発明は、圃場を作業走行する走行機体と、次行程における作業走行の目標となる溝を圃場に形成する左右のマーカと、左の前記マーカを、圃場に作用しない上昇状態と、前記走行機体の左側に振り出して前記溝を形成する下降状態とに切り換える左マーカ切換手段と、右の前記マーカを、圃場に作用しない上昇状態と、前記走行機体の右側に振り出して前記溝を形成する下降状態とに切り換える右マーカ切換手段と、前記走行機体をアクチュエータ動力で操舵する操舵ユニットと、前記走行機体の進行方向を撮影するカメラと、制御部と、を備える作業車両であって、前記制御部は、前記カメラの撮影画像において前記溝を認識する溝認識手段と、前記カメラの撮影画像において前行程の作業跡を認識する作業跡認識手段と、前記溝に沿って作業走行するように前記操舵ユニットを制御する自動操舵制御手段と、行程始端位置で左右いずれかの前記マーカを自動的に下降させるマーカ制御手段と、を備え、前記マーカ制御手段は、前記作業跡が前記走行機体の左右いずれの側にあるかを判断し、前記作業跡とは逆側の前記マーカを下降させることを特徴とする。
また、請求項2の発明は、請求項1に記載の作業車両であって、前記マーカ制御手段は、行程始端位置で前記溝を認識し、前記自動操舵制御を開始してから前記マーカを下降させることを特徴とする。
また、請求項3の発明は、請求項1又は2に記載の作業車両であって、前記マーカ制御手段は、行程終端位置での機体旋回操作に応じて前記マーカを自動的に上昇させることを特徴とする。
【発明の効果】
【0006】
請求項1の発明によれば、マーカ制御手段は、作業跡が走行機体の左右いずれの側にあるかを判断し、作業跡とは逆側のマーカを下降させるので、誤って前行程側のマーカを下降させることを防止でき、その結果、前行程の作業跡に不要な溝が形成される不都合や、マーカの振り出し方向を再度切り換えるための無駄な操作を回避できる。
また、請求項2の発明によれば、マーカ制御手段は、行程始端位置で溝を認識し、自動操舵制御を開始してからマーカを下降させるので、安定走行状態においてマーカの振り出し方向を適切に判断できる。
また、請求項3の発明によれば、マーカ制御手段は、行程終端位置での機体旋回操作に応じてマーカを自動的に上昇させるので、作業機の昇降に連動させなくても、行程終端位置でマーカを確実に格納できる。
【図面の簡単な説明】
【0007】
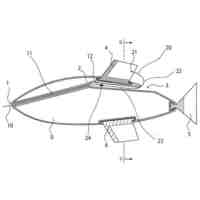
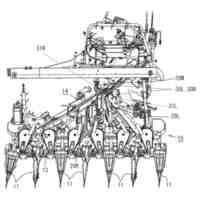
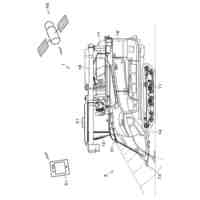
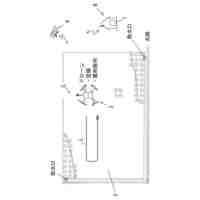
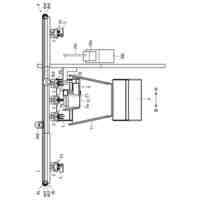
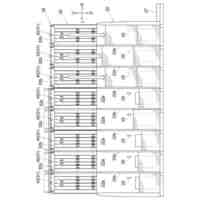
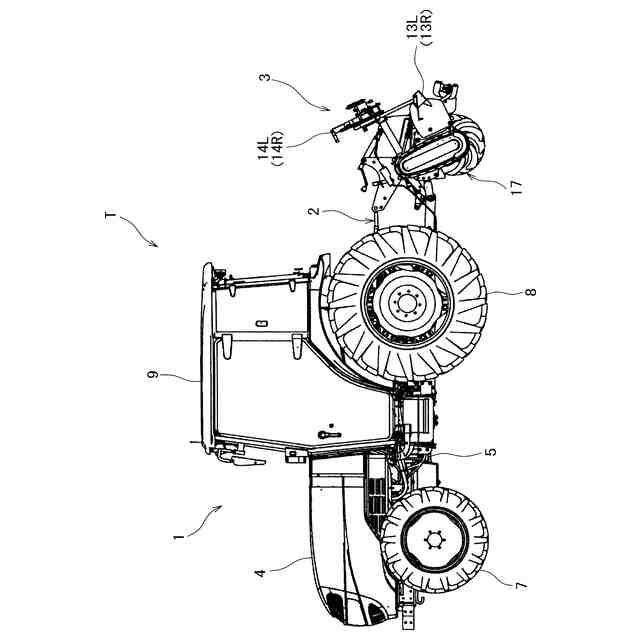
トラクタの側面図である。
運転部の斜視図である。
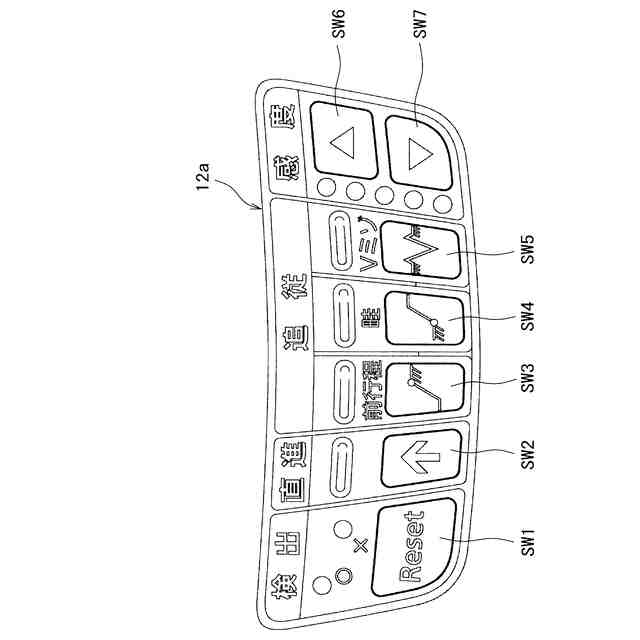
操舵ユニットの操作パネルを示す図である。
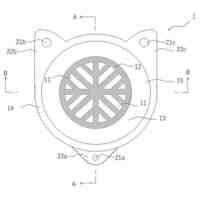
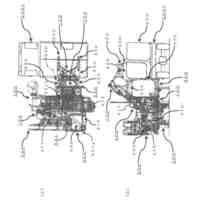
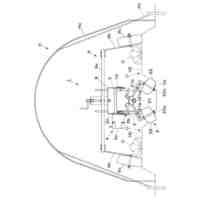
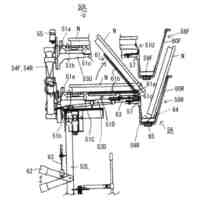
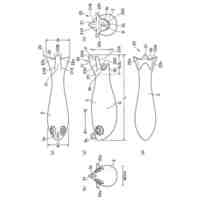
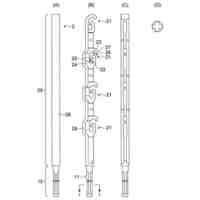
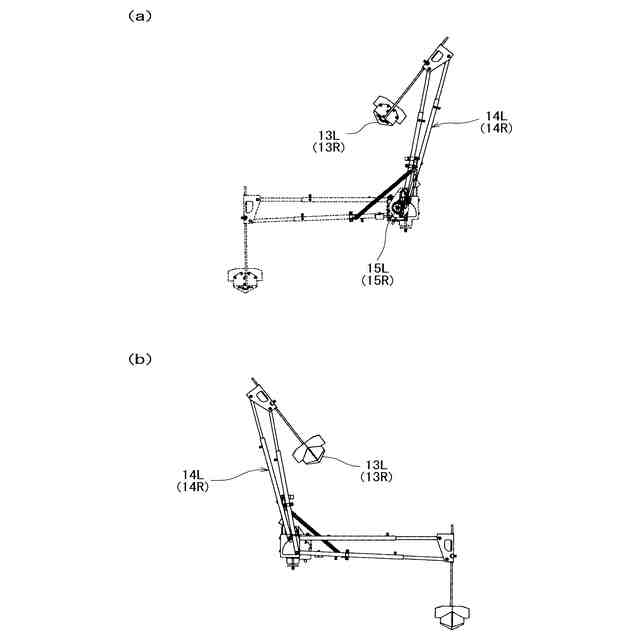
(a)はマーカ昇降機構の背面図、(b)はマーカ昇降機構の正面図である。
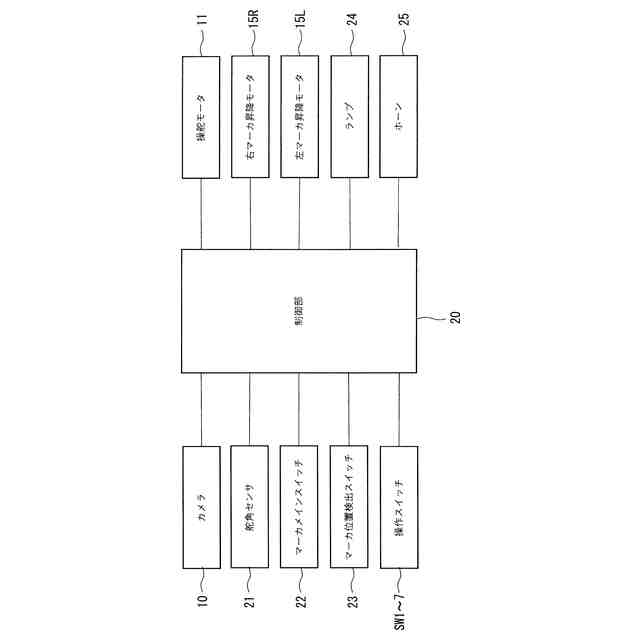
制御部の入出力を示すブロック図である。
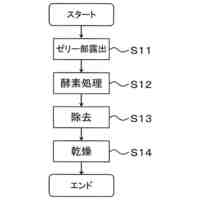
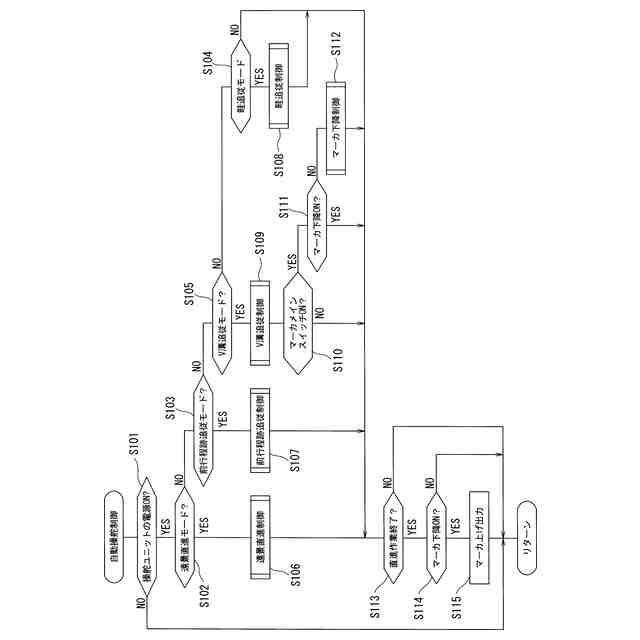
自動操舵制御の処理手順を示すフローチャートである。
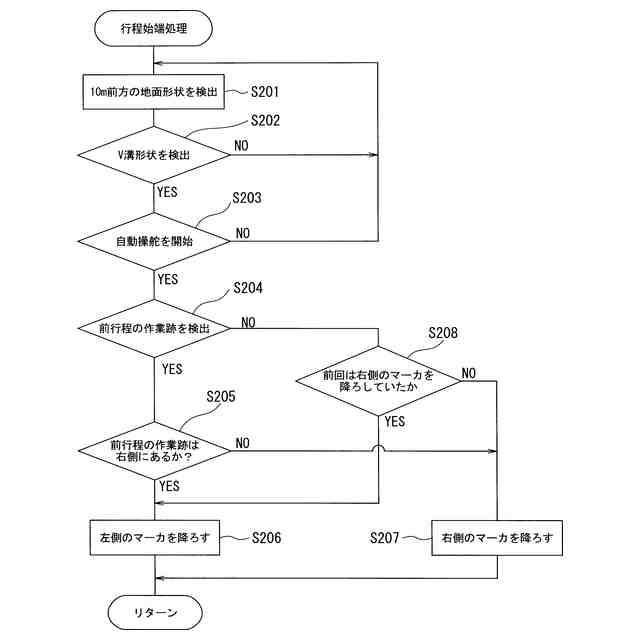
V溝追従モードの行程始端で実行される処理手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の実施の形態について、図面に基づいて説明する。図1において、1はトラクタT(作業車両)の走行機体であって、該走行機体1の後部には、昇降リンク機構2を介して作業機3が昇降動作可能に連結されている。
【0009】
走行機体1は、エンジン(図示せず)が搭載されるエンジン搭載部4と、エンジン動力を変速して走行動力及び作業動力を出力するミッションケース5と、ステアリングハンドル6(図2参照)の操作に応じて操舵され、且つミッションケース5から出力される走行動力で回転駆動される左右の前輪7と、ミッションケース5から出力される走行動力で回転駆動される左右の後輪8と、ステアリングハンドル6などの各種の操作具が配置される運転部9と、を備える。
【0010】
運転部9には、走行機体1の前進方向を撮影するカメラ10(図5参照)や、操舵モータ11(図5参照)の動力でステアリングハンドル6を回し操作し、前輪7を操舵する操舵ユニット12(図2参照)が設けられている。図2及び図3に示すように、操舵ユニット12は、各種の操作スイッチSW1~SW7が配置された操作パネル12aを備える。各種の操作スイッチSW1~SW7には、認識結果をリセットするリセットスイッチSW1と、遠景直進モードを選択する遠景直進スイッチSW2と、前行程跡追従モードを選択する前行程跡追従スイッチSW3と、畦追従モードを選択する畦追従スイッチSW4と、V溝追従モードを選択するV溝追従スイッチSW5と、制御感度を上げ下げする感度調整スイッチSW6、SW7と、が含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
産卵床
4日前
個人
魚釣用ルアー
26日前
個人
動物飼育用ケージ
11日前
個人
猫用のトイレ
11日前
井関農機株式会社
作業車両
20日前
個人
水中生物採集器
4日前
井関農機株式会社
作業車両
20日前
個人
計量カップ付き肥料袋
24日前
個人
木造人工島の海産物農業
20日前
井関農機株式会社
収穫機
21日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
苗移植機
11日前
株式会社大垣化工
糸収容具
12日前
井関農機株式会社
作業車両
24日前
株式会社大貴
動物用トイレ
4日前
みのる産業株式会社
作業台車
13日前
日東電工株式会社
水槽
27日前
ロンタイ株式会社
植生体
11日前
井関農機株式会社
防除システム
18日前
井関農機株式会社
乗用型苗植機
14日前
井関農機株式会社
台木切断装置
24日前
カゴメ株式会社
トマト種子の製造方法
27日前
個人
水田用除草機器および水田用除草体
12日前
MWPO株式会社
キャットタワー
4日前
株式会社クボタ
田植機
11日前
有限会社伊藤テクノリサーチ
防草施工方法
5日前
株式会社 ジークラック
ルアー
12日前
グローブライド株式会社
ルアー
21日前
有限会社シーム
横紐支持具
20日前
株式会社クボタ
降雨制御システム
12日前
住友化学株式会社
有害生物防除方法
27日前
トヨタ自動車株式会社
資源化支援システム
26日前
TEAM ONE株式会社
害虫捕獲用粘着テープ
19日前
井関農機株式会社
乗用苗移植機の安全装置
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ