TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024033371
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022136910
出願日
2022-08-30
発明の名称
洗浄装置及び、自動洗浄システム
出願人
株式会社大林組
代理人
弁理士法人プロスペック特許事務所
,
個人
主分類
E21F
17/00 20060101AFI20240306BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】洗浄効率を効果的に向上する。
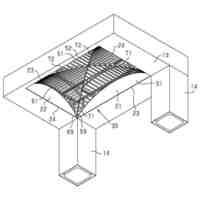
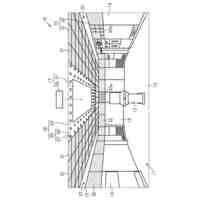
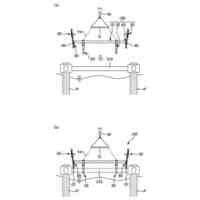
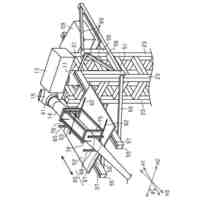
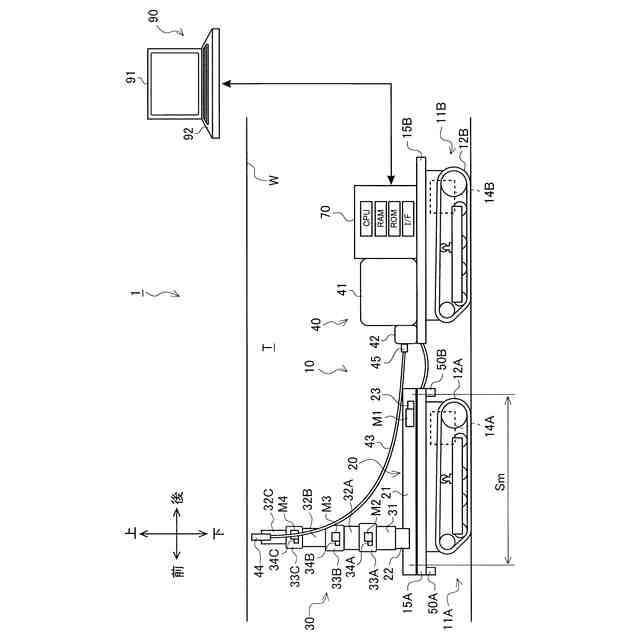
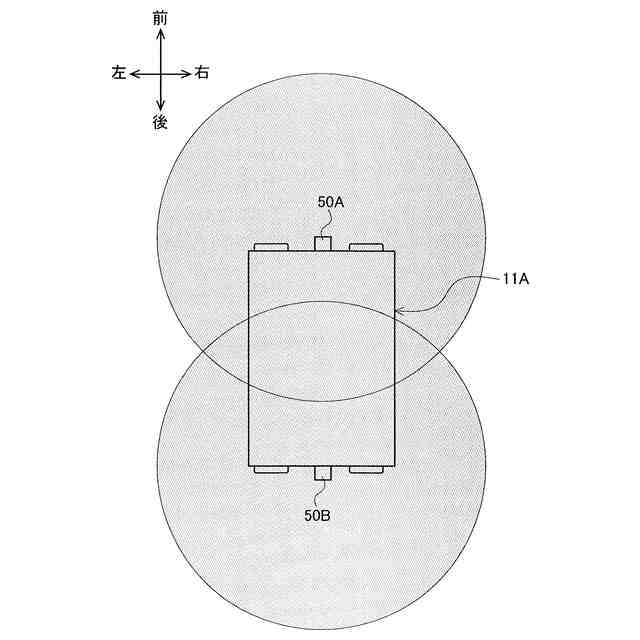
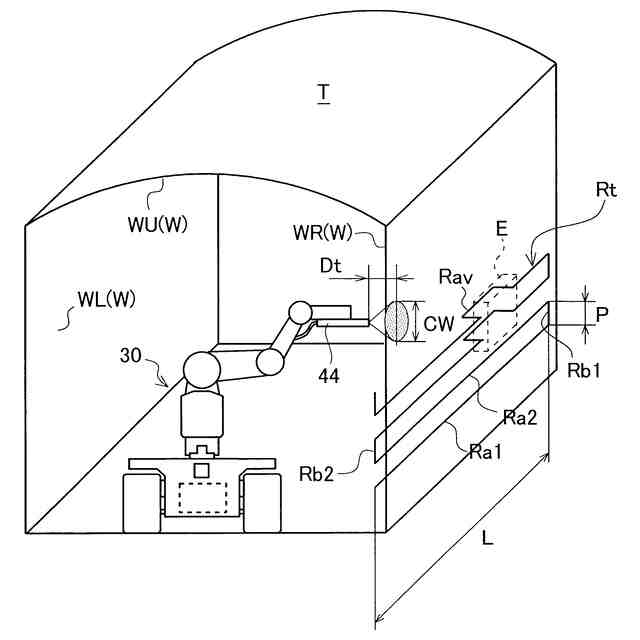
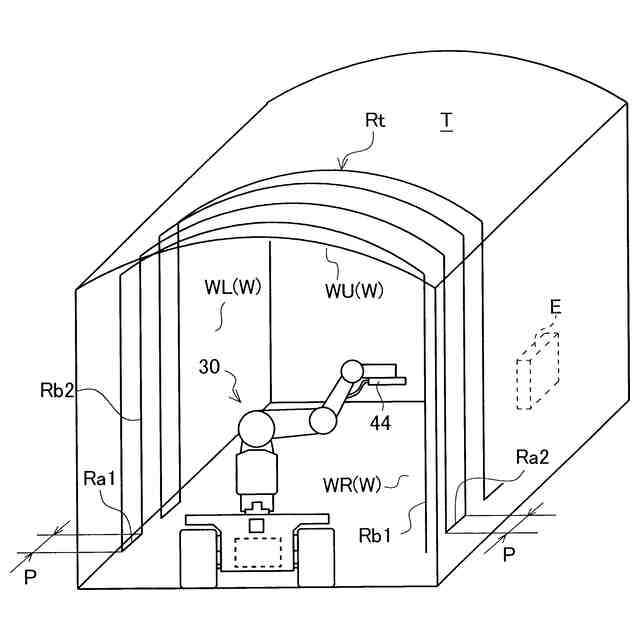
【解決手段】トンネルT内を少なくともトンネル軸方向に向けて移動可能な移動装置11A,11Bと、移動装置11A,11Bの上部に配されており、移動装置11A,11Bの前後方向と直交する方向に延びるとともに、前後方向の軸心周りに回転自在なアーム部材32A~32Cを有するアーム装置30と、アーム部材32Cの先端部に設けられており、トンネルTの壁面Wに向けて高圧流体を噴射可能なノズル44を含む高圧洗浄機40と、を備え、アーム装置30は、アーム部材32A~32Cを軸心周りに回転させることにより、ノズル44をトンネル周方向に旋回可能に構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
トンネル内を少なくともトンネル軸方向に向けて移動可能な移動装置と、
前記移動装置の上部に配されており、前記移動装置の前後方向と直交する方向に延びるとともに、前記前後方向の軸心周りに回転自在なアーム部材を有するアーム装置と、
前記アーム部材の先端部に設けられており、前記トンネルの壁面に向けて高圧流体を噴射可能なノズルを含む高圧洗浄機と、を備え、
前記アーム装置は、前記アーム部材を前記軸心周りに回転させることにより、前記ノズルをトンネル周方向に旋回可能に構成されている
ことを特徴とする洗浄装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の洗浄装置であって、
前記アーム装置は、前記アーム部材を複数備えるとともに、複数の前記アーム部材が関節部を介して順に連結されたロボットアーム装置である
洗浄装置。
【請求項3】
請求項1に記載の洗浄装置であって、
前記アーム装置は、前記アーム部材を複数備えるとともに、複数の前記アーム部材のうち、少なくとも一つのアーム部材が他のアーム部材にアーム軸方向に進退自在に設けられた伸縮アーム装置である
洗浄装置。
【請求項4】
請求項1から3の何れか一項に記載の洗浄装置であって、
前記移動装置の上部に設けられており、前記アーム装置を前記移動装置に対して前記前後方向に相対移動可能に支持するスライダを有するスライド装置をさらに備える
洗浄装置。
【請求項5】
請求項4に記載の洗浄装置を備える自動洗浄システムであって、
前記移動装置、前記スライド装置及び、前記アーム装置の作動を制御する制御装置をさらに備え、
前記制御装置は、
前記トンネルをトンネル軸方向に複数の区間に分割するとともに、1区間分のトンネル軸方向長さを前記スライダの前後方向への移動可能量よりも短い長さに設定し、
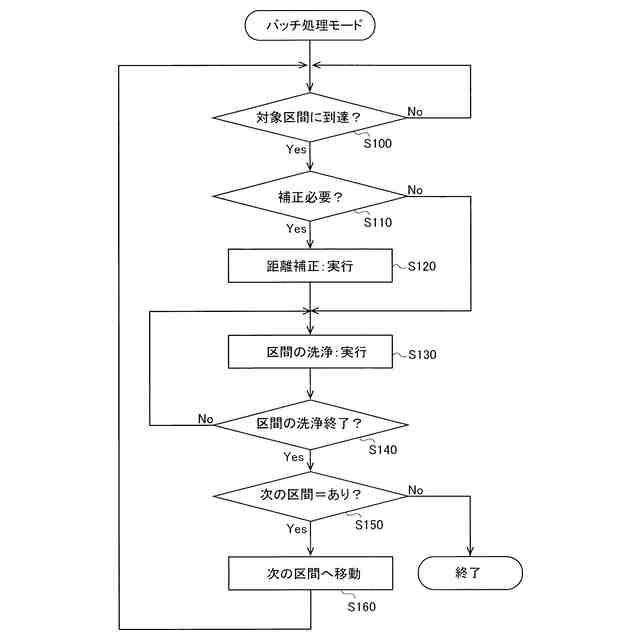
前記ノズルから前記壁面に向けて前記高圧流体を噴射しながら、前記スライド装置及び、前記アーム装置を作動させることにより前記1区間分の前記壁面を洗浄する洗浄工程と、前記1区間分の洗浄終了後に前記移動装置を作動させて前記洗浄装置を次の区間に移動させる移動工程と、を交互に繰り返すバッチ処理モードにより前記複数の区間の前記壁面を自動洗浄する
ことを特徴とする自動洗浄システム。
【請求項6】
請求項5に記載の自動洗浄システムであって、
前記洗浄装置と前記壁面との距離を取得する距離取得装置をさらに備え、
前記制御装置は、
設定した目標制御量に基づいて、前記洗浄工程における前記スライド装置と前記アーム装置との作動及び、前記移動工程における前記移動装置の作動を制御するとともに、洗浄を開始する区間である洗浄対象区間に前記移動装置を移動させた後、当該洗浄対象区間の洗浄を開始するよりも前に前記距離取得装置により取得される前記距離に基づいて、前記洗浄対象区間の前記洗浄工程に用いる目標制御量を補正する
自動洗浄システム。
【請求項7】
請求項1から3の何れか一項に記載の洗浄装置を備える自動洗浄システムであって、
前記移動装置及び、前記アーム装置の作動を制御する制御装置をさらに備え、
前記制御装置は、
前記ノズルから前記壁面に向けて前記高圧流体を噴射しながら、前記アーム装置を作動させ、前記ノズルをトンネル周方向に旋回させることにより、前記壁面をトンネル周方向に洗浄する周方向洗浄工程と、前記ノズルから前記壁面に向けて前記高圧流体を噴射しながら、前記移動装置を作動させ、前記ノズルをトンネル軸方向に移動させることにより、前記壁面をトンネル軸方向に洗浄する軸方向洗浄工程と、を交互に繰り返す連続処理モードにより前記壁面を自動洗浄する
ことを特徴とする自動洗浄システム。
【請求項8】
請求項7に記載の自動洗浄システムであって、
前記洗浄装置と前記壁面との距離を取得する距離取得装置をさらに備え、
前記制御装置は、
設定した目標制御量に基づいて、前記周方向洗浄工程における前記アーム装置の作動及び、前記軸方向洗浄工程における前記移動装置の作動を制御するとともに、前記軸方向洗浄工程により前記移動装置を移動させた後、前記周方向洗浄工程を開始するよりも前に前記距離取得装置により取得される前記距離に基づいて、当該周方向洗浄工程の目標制御量及び、次の軸方向洗浄工程の目標制御量を補正する
自動洗浄システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、洗浄装置及び、自動洗浄システムに関し、特に、トンネル壁面等の洗浄に好適な技術に関するものである。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
一般に、トンネルの新規工事やリニューアル工事においては、高圧洗浄機を用いてトンネル壁面をはつる下地処理等の洗浄作業が行われる。このような洗浄作業を作業員の人力により行うと、高圧洗浄機の吐出ノズルから噴射される高圧洗浄水の噴霧や、トンネル壁面から除去される異物等の飛散に伴い、作業員の視界が遮られることになる。その結果、作業員が作業中に洗浄箇所を見失うことにより、洗浄が不均一になるいわゆる洗浄ムラを生じるといった課題がある。また、狭隘なトンネル等においては、作業員に無理な姿勢を強いることになり、作業員の負担を増大させるといった課題もある。
【0003】
トンネル壁面の洗浄を自動的に行う装置として、例えば、特許文献1,2には、トンネル内を走行可能な台車に複数本のアーム等を設け、アームの先端に高圧洗浄機の吐出ノズルを取り付けた装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
実開昭61-58300号公報
特開昭61-266800号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1記載の装置は、台車に支柱を立設するとともに、支柱に複数本のアームを上下方向に所定間隔で配設し、各アームの先端に吐出ノズルを取り付けている。しかしながら、複数本のアームは支柱から同一方向に並行に延びており、各アームを大きく回転させると、上下に隣接するアーム同士が互いに干渉することになる。すなわち、各アームの可動範囲が制限されている。このため、特許文献1記載の装置では、トンネル壁面を周方向に一度に洗浄することができず、洗浄範囲を一方の壁面から他方の壁面に遷移させる場合には、支柱又は台車の何れか一方を反転させる必要があり、作業効率の低下を招く課題がある。
【0006】
また、特許文献1記載の装置は、トンネル壁面と吐出ノズルとの距離を計測するために、先端部をトンネル壁面に当接させる接触式のセンサを用いている。このため、センサによってトンネル壁面を損傷させる可能性がある。また、センサがトンネル壁面に設けられた電気盤等の既設物に引っ掛かった場合には、洗浄作業を一時的に中断しなければならない課題もある。
【0007】
特許文献2記載の装置は、台車にスタンドを立設するとともに、スタンドに複数本のシリンダを設け、シリンダの先端に吐出ノズルを移動させるための案内レールを取り付けている。すなわち、吐出ノズルが案内レールに沿った移動しかできない構造になっている。このため、特許文献2記載の装置では、トンネル壁面に電気盤や照明機器等の既設物が存在する場合には、吐出ノズルとの干渉を防止するために、それら既設物を予め取り外す事前作業が必要となり、作業効率の低下を招くといった課題がある。また、案内レールは、トンネルの壁面に沿った形状にする必要があり、種々のトンネル断面形状に対応できない課題もある。
【0008】
本開示の技術は、上記事情に鑑みてなされたものであり、簡素な構成でトンネル壁面の洗浄作業効率を効果的に向上することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本開示の洗浄装置は、
トンネル内を少なくともトンネル軸方向に向けて移動可能な移動装置と、
前記移動装置の上部に配されており、前記移動装置の前後方向と直交する方向に延びるとともに、前記前後方向の軸心周りに回転自在なアーム部材を有するアーム装置と、
前記アーム部材の先端部に設けられており、前記トンネルの壁面に向けて高圧流体を噴射可能なノズルを含む高圧洗浄機と、を備え、
前記アーム装置は、前記アーム部材を前記軸心周りに回転させることにより、前記ノズルをトンネル周方向に旋回可能に構成されていることを特徴とする。
【0010】
本開示の他の態様において、
前記アーム装置は、前記アーム部材を複数備えるとともに、複数の前記アーム部材が関節部を介して順に連結されたロボットアーム装置であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建物
19日前
株式会社大林組
建築物
1か月前
株式会社大林組
建築物
1か月前
株式会社大林組
建築物
1か月前
株式会社大林組
建築物
1か月前
株式会社大林組
建築物
1か月前
株式会社大林組
制振建物
12日前
株式会社大林組
支承装置
1か月前
株式会社大林組
天井構造物
1か月前
株式会社大林組
地下貯留槽
18日前
株式会社大林組
照明システム
27日前
株式会社大林組
真三軸試験方法
1か月前
株式会社大林組
庇および構造物
19日前
株式会社大林組
給気照明システム
27日前
株式会社大林組
異常検知システム
1か月前
株式会社大林組
建築物の施工方法
1か月前
株式会社大林組
接続構造及び接続方法
24日前
株式会社大林組
接続構造及び接続方法
24日前
株式会社大林組
木質横軸材の接合構造
1か月前
株式会社大林組
評価装置及び、評価方法
1か月前
株式会社大林組
照明を計測するシステム
27日前
株式会社大林組
ブラインドボックスの設置構造
1か月前
株式会社大林組
藻類培養装置及び藻類培養方法
1か月前
株式会社大林組
作業支援装置及び作業支援方法
19日前
株式会社大林組
洗浄装置及び、自動洗浄システム
1か月前
株式会社大林組
照明計画の評価方法及びプログラム
27日前
株式会社大林組
切断装置及び棒状部材の切断撤去方法
24日前
株式会社大林組
混練物の難固着構造及び混練物打設器具
1か月前
株式会社大林組
有機排水浄化システム及び有機排水浄化方法
26日前
株式会社大林組
木架構の接合構造、及び、木架構の接合方法
1か月前
株式会社大林組
プログラム、コンピュータおよび情報処理方法
1か月前
株式会社大林組
プログラム、コンピュータおよび情報処理方法
1か月前
株式会社大林組
回転体設置方法およびブレードリフトアップ装置
4日前
株式会社大林組
貫入抵抗低減装置及びサクション構造体の貫入方法
4日前
株式会社大林組
水害危険度評価方法、及び、水害危険度評価システム
20日前
株式会社大林組
作業支援システム、作業支援方法及び作業支援プログラム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ