TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024033249
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022136740
出願日
2022-08-30
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01C
11/02 20060101AFI20240306BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】旋回操作の時期を補助すること。
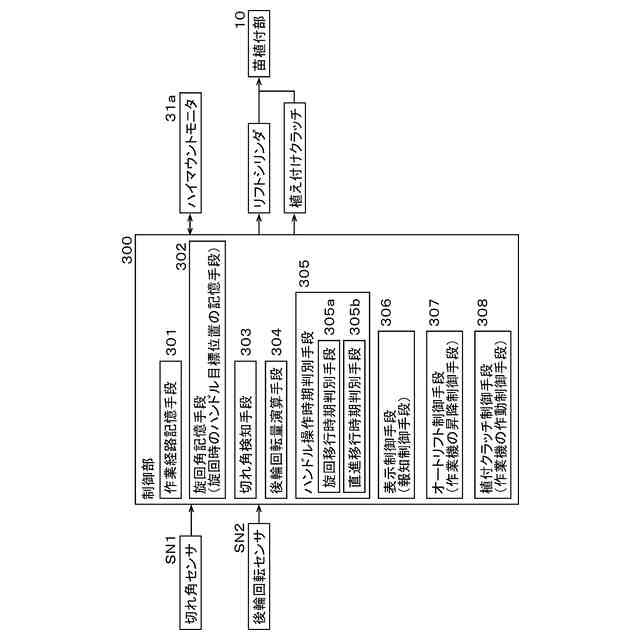
【解決手段】第1の作業経路(403-2)から第2の作業経路(403-3)に向けて走行する際に、車体(4)を旋回から直進に移行させる直進移行時期になったことが検知されると、作業者に直進移行時期を報知する報知手段(31a)を備えることで、作業者が直進移行時期になったことを認識することができ、旋回操作の時期を補助することができる。
【選択図】図7
特許請求の範囲
【請求項1】
後部に作業機(10)を有する車体(4)と、
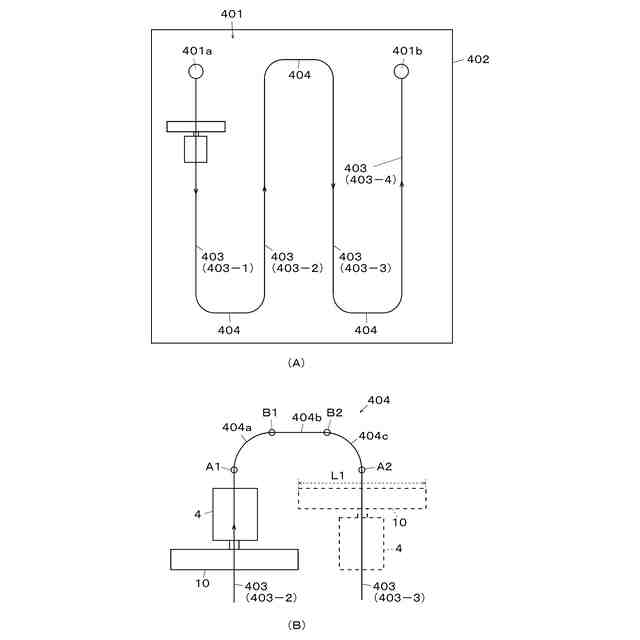
直線状の第1の作業経路(403-2)と、前記第1の作業経路(403-2)に対して並行する直線状であり且つ前記作業機(10)の作業幅(L1)に基づく間隔離れて隣り合う第2の作業経路(403-3)と、を有する走行経路(401)に沿って前記車体(4)を走行させる場合に、前記第1の作業経路(403-2)から前記第2の作業経路(403-3)に向けて走行する際に、前記車体(4)を旋回から直進に移行させる直進移行時期になったことが検知されると、作業者に直進移行時期を報知する報知手段(31a)と、
を備えたことを特徴とする作業車両。
続きを表示(約 1,900 文字)
【請求項2】
前記第1の作業経路(403-2)および前記第2の作業経路(403-3)に加えて、前記第1の作業経路(403-2)の終端(A1)と前記第2の作業経路(403-3)の始端(A2)との間に設定され、前記第1の作業経路(403-2)に交差する直線状の横走り経路(404b)を有する前記走行経路(401)と、
前記第1の作業経路(403-2)から前記横走り経路(404b)に移行する際に、前記車体(4)を旋回から直進に移行させる前記直進移行時期になったことが検知されると、作業者に直進移行時期を報知する前記報知手段(31a)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記横走り経路(404b)から前記第2の作業経路(403-3)に移行する際に、前記車体(4)を直進から旋回に移行させる旋回移行時期になったことが検知されると、作業者に旋回移行時期を報知する前記報知手段(31a)、
を備えたことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記第1の作業経路(403-2)および前記第2の作業経路(403-3)に加えて、前記第1の作業経路(403-2)の終端(A1)と前記第2の作業経路(403-3)の始端(A2)との間に設定され、前記第1の作業経路(403-2)に交差する直線状の横走り経路(404b)を有する前記走行経路(401)と、
前記横走り経路(404b)から前記第2の作業経路(403-3)に移行する際に、前記車体(4)を旋回から直進に移行させる前記直進移行時期になったことが検知されると、作業者に直進移行時期を報知する前記報知手段(31a)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項5】
前記第1の作業経路(403-2)および前記第2の作業経路(403-3)に加えて、前記第1の作業経路(403-2)の終端(A1)と前記第2の作業経路(403-3)の始端(A2)との間に設定された弧状の転回経路(404′)を有する前記走行経路(401)と、
前記弧状の転回経路(404′)から前記第2の作業経路(403-3)に移行する際に、前記車体(4)を旋回から直進に移行させる前記直進移行時期になったことが検知されると、作業者に直進移行時期を報知する前記報知手段(31a)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項6】
作業者が操作して前記車体(4)を旋回させるハンドル(32)と、
前記ハンドル(32)がきられた場合に、前記作業機(10)を上昇させる作業機制御手段(307)と、
を備えたことを特徴とする請求項1ないし5のいずれかに記載の作業車両。
【請求項7】
前記ハンドル(32)の切れ角を検知する切れ角検知手段(303)と、
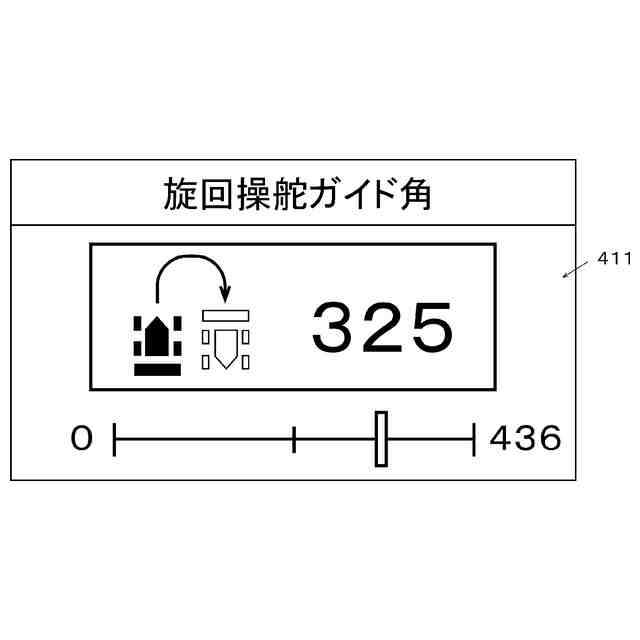
前記切れ角検知手段(303)で検知された前記ハンドル(32)の現在の操作位置と、前記車体(4)の直進時または旋回時の前記ハンドル(32)の目標位置と、のズレを表示する前記報知手段(31a)と、
を備えたことを特徴とする請求項6に記載の作業車両。
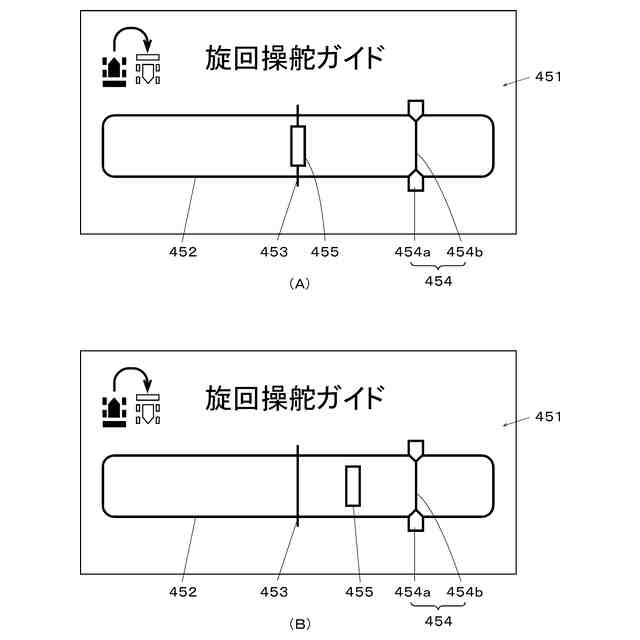
【請求項8】
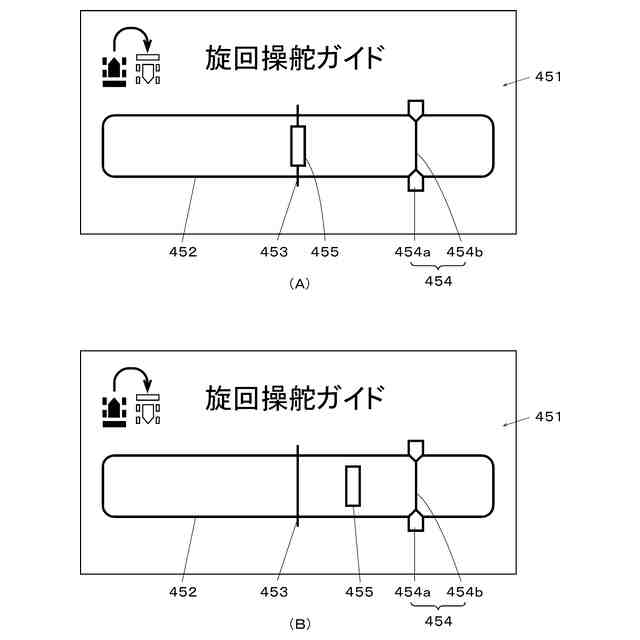
長手方向に延びる枠部(452)と、
前記枠部(452)の長手方向の中央部に表示される直進時の目標位置と、
前記ハンドル(32)の切れ角が大きくなるほど前記枠部(452)の長手方向の端側に表示される旋回時の目標位置であって、前記枠部(452)の短手方向の両端部に配置された五角形状の図形(454a)と、前記五角形状の図形どうしを結ぶ線分(454b)と、を有する画像(454)で表示される前記旋回時の目標位置と、
前記切れ角検知手段(303)で検知された前記ハンドル(32)の切れ角に応じて前記枠部(452)の長手方向に沿って移動する四角形状の画像(455)で表示されると共に、前記切れ角検知手段(303)で検知された前記ハンドル(32)の切れ角が大きくなるほど前記枠部(452)の長手方向の端部に前記四角形状の画像(455)が表示される前記現在の操作位置と、
を備えたことを特徴とする請求項7に記載の作業車両。
【請求項9】
前記旋回時の目標位置は、作業者の入力に応じて設定可能である
ことを特徴とする請求項8に記載の作業車両。
【請求項10】
前記現在の操作位置と前記目標位置とのズレが、予め定められた範囲内の場合と範囲外の場合とで、表示する色を異ならせる
ことを特徴とする請求項7に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、田植機、耕うん機、トラクタ等の作業車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
田植機やトラクタ等の作業車両において、直線状の作業経路に沿って作業した後、次の作業経路に移行する際に、ハンドルが切られると植付部を上昇させ、ハンドル切れ角が所定範囲内になると植付部が下降される技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2012-191957号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、ハンドル操作に連動して作業機が昇降しているが、ハンドル操作、特に、ハンドルを切るタイミングや旋回から直進にハンドルを戻すタイミングを誤ると、作業機が昇降するタイミングがズレ、作業が行われる位置がずれる問題がある。
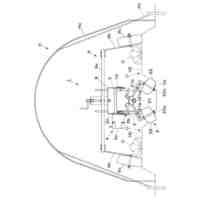
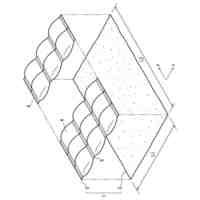
図13は大型の作業機を備えた作業機がUターンした場合の問題点の説明図である。
図13において、特に、条数の多い田植え機や、作業幅(横幅)の大きな作業機01を使用する場合、隣接する直線状の作業経路02,03どうしの間隔も広くなる。すなわち、旋回する際に、U字状の転回経路04に沿って走行してしまうと(いわゆる、Uターンしてしまうと)、早く回りすぎてしまい、次の作業経路03に一致せず、作業幅も重複する領域06が発生する問題がある。なお、作業経路02,03の間隔に合わせて旋回半径を大きくすることも考えられるが、この場合、畔際の作業がされない領域が広くなってしまい、作業性が低下する場合がある。
【0005】
本発明は、旋回操作の時期を補助することを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、後部に作業機(10)を有する車体(4)と、直線状の第1の作業経路(403-2)と、前記第1の作業経路(403-2)に対して並行する直線状であり且つ前記作業機(10)の作業幅(L1)に基づく間隔離れて隣り合う第2の作業経路(403-3)と、を有する走行経路(401)に沿って前記車体(4)を走行させる場合に、前記第1の作業経路(403-2)から前記第2の作業経路(403-3)に向けて走行する際に、前記車体(4)を旋回から直進に移行させる直進移行時期になったことが検知されると、作業者に直進移行時期を報知する報知手段(31a)と、を備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記第1の作業経路(403-2)および前記第2の作業経路(403-3)に加えて、前記第1の作業経路(403-2)の終端(A1)と前記第2の作業経路(403-3)の始端(A2)との間に設定され、前記第1の作業経路(403-2)に交差する直線状の横走り経路(404b)を有する前記走行経路(401)と、前記第1の作業経路(403-2)から前記横走り経路(404b)に移行する際に、前記車体(4)を旋回から直進に移行させる前記直進移行時期になったことが検知されると、作業者に直進移行時期を報知する前記報知手段(31a)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記横走り経路(404b)から前記第2の作業経路(403-3)に移行する際に、前記車体(4)を直進から旋回に移行させる旋回移行時期になったことが検知されると、作業者に旋回移行時期を報知する前記報知手段(31a)、を備えたことを特徴とする請求項2に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記第1の作業経路(403-2)および前記第2の作業経路(403-3)に加えて、前記第1の作業経路(403-2)の終端(A1)と前記第2の作業経路(403-3)の始端(A2)との間に設定され、前記第1の作業経路(403-2)に交差する直線状の横走り経路(404b)を有する前記走行経路(401)と、前記横走り経路(404b)から前記第2の作業経路(403-3)に移行する際に、前記車体(4)を旋回から直進に移行させる前記直進移行時期になったことが検知されると、作業者に直進移行時期を報知する前記報知手段(31a)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0010】
請求項5に記載の発明は、前記第1の作業経路(403-2)および前記第2の作業経路(403-3)に加えて、前記第1の作業経路(403-2)の終端(A1)と前記第2の作業経路(403-3)の始端(A2)との間に設定された弧状の転回経路(404′)を有する前記走行経路(401)と、前記弧状の転回経路(404′)から前記第2の作業経路(403-3)に移行する際に、前記車体(4)を旋回から直進に移行させる前記直進移行時期になったことが検知されると、作業者に直進移行時期を報知する前記報知手段(31a)と、を備えたことを特徴とする請求項1に記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
産卵床
2日前
個人
魚釣用ルアー
24日前
個人
動物飼育用ケージ
9日前
個人
猫用のトイレ
9日前
個人
水中生物採集器
2日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
個人
計量カップ付き肥料袋
22日前
個人
木造人工島の海産物農業
18日前
井関農機株式会社
収穫機
19日前
井関農機株式会社
苗移植機
9日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
9日前
株式会社大貴
動物用トイレ
2日前
株式会社大垣化工
糸収容具
10日前
井関農機株式会社
作業車両
17日前
みのる産業株式会社
作業台車
11日前
井関農機株式会社
乗用型苗植機
12日前
ロンタイ株式会社
植生体
9日前
井関農機株式会社
台木切断装置
22日前
井関農機株式会社
防除システム
16日前
MWPO株式会社
キャットタワー
2日前
個人
水田用除草機器および水田用除草体
10日前
有限会社伊藤テクノリサーチ
防草施工方法
3日前
株式会社クボタ
田植機
9日前
株式会社 ジークラック
ルアー
10日前
グローブライド株式会社
ルアー
19日前
有限会社シーム
横紐支持具
18日前
株式会社クボタ
降雨制御システム
10日前
TEAM ONE株式会社
害虫捕獲用粘着テープ
17日前
トヨタ自動車株式会社
資源化支援システム
24日前
井関農機株式会社
乗用苗移植機の安全装置
22日前
住友化学株式会社
有害生物防除方法
25日前
個人
豚舎、およびそれを利用した養豚方法
10日前
アース製薬株式会社
線香
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ