TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025180833
公報種別
公開特許公報(A)
公開日
2025-12-11
出願番号
2024088441
出願日
2024-05-30
発明の名称
測距装置及び方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01S
17/36 20060101AFI20251204BHJP(測定;試験)
要約
【課題】 対象物との距離によって測定する位置がずれてしまい、距離画像に歪みが生じるという課題があった。
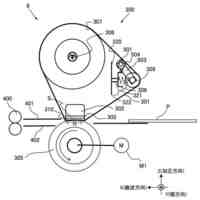
【解決手段】 階層的に組み合わされた複数の周波数で変調された変調波形を生成する手段(20)と、該変調波形を測定対象に走査して照射する手段(3)と、該測定対象からの反射波を受光する手段(4)と、該反射波から変調周波数それぞれの位相差を検出して対象物までの距離を算出する手段(23)と、を備えた3次元測距装置であって、既に行なった座標の測定結果に応じて座標の測定のタイミングを制御する手段(27)と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
階層的に組み合わされた複数の周波数で変調された変調波形を生成する手段(20)と、
該変調波形を測定対象に走査して照射する手段(3)と、
該測定対象からの反射波を受光する手段(4)と、
該反射波から変調周波数それぞれの位相差を検出して対象物までの距離を算出する手段(23)と、
を備えた3次元測距装置であって、
既に行なった座標の測定結果に応じて座標の測定のタイミングを制御する手段(27)と、
を備えたことを特徴とする測距装置。
続きを表示(約 870 文字)
【請求項2】
前記タイミング制御手段は、既に行なった近傍の座標の測定結果を参照することを特徴とする請求項1に記載の測距装置。
【請求項3】
前記タイミング制御手段は前記距離算出手段で使用する主変調波の測定期間を制御し、参照した座標の距離が遠くなる程度に応じて座標の測定期間の後方に位置するよう制御することを特徴とする請求項1または2に記載の測距装置。
【請求項4】
前記受光手段で受光したデータを格納する記憶手段をさらに備え、前記距離算出手段は該記憶手段において前記測定期間に対応する位置からデータを読み出して距離を算出することを特徴とする請求項3に記載の測距装置。
【請求項5】
階層的に組み合わされた複数の周波数で変調された変調波形を生成するステップと、
該変調波形を測定対象に走査して照射するステップと、
該測定対象からの反射波を受光するステップと、
該反射波から変調周波数それぞれの位相差を検出して対象物までの距離を算出するステップと、
を備えた3次元測距方法であって、
既に行なった座標の測定結果に応じて座標の測定のタイミングを制御するステップと、
を備えたことを特徴とする測距方法。
【請求項6】
前記タイミング制御ステップは、既に行なった近傍の座標の測定結果を参照することを特徴とする請求項5に記載の測距方法。
【請求項7】
前記タイミング制御ステップは前記距離算出ステップで使用する主変調波の測定期間を制御し、参照した座標の距離が遠くなる程度に応じて座標の測定期間の後方に位置するよう制御することを特徴とする請求項5または6に記載の測距方法。
【請求項8】
前記受光ステップで受光したデータを格納する記憶ステップをさらに備え、前記距離算出ステップは該記憶ステップにおいて前記測定期間に対応する位置からデータを読み出して距離を算出することを特徴とする請求項7に載の測距方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、間接ToF方式を用いた3次元測距装置及び方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
自動車のADAS(先進運転支援システム)における周辺状況の検出手段として、レーザ光によって検知と測距を行なうLiDAR装置が実用化されている。レーザ光を二次元方向に走査(例えばラスタスキャン)して測距することで、対象物との距離がわかるような距離画像を作成できる。対象物の種類と距離を認識することで、自動緊急ブレーキのような機能を実現することができる。
【0003】
LiDAR装置は、ToF(Time Of Flight)方式を用いて3次元測距を行なう。ToF方式には直接ToF方式と間接ToF方式がある。間接ToF方式は、レーザ光を対象物に照射し、戻ってきた反射波の位相遅れ分を測定することで距離を求める方式である。
【0004】
間接ToF方式を用いて長距離で高精度に距離を測定する方法として、例えば、特許文献1に記載されているような方法が実現されている。
(1)レーザ光を高周波と低周波の波形で多重変調し、各周波数の測定値から距離を算出する(特許文献1)。
【先行技術文献】
【特許文献】
【0005】
特開昭64-69983号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来例においては、対象物との距離によって測定する位置がずれてしまい、距離画像に歪みが生じるという課題があった。従来例の測距装置はレーザ光を走査して測定する。例えば、対象領域の左端から測定を開始し、右方向に順に位置をずらしながら測定し、右端まで走査する。近い物体においては、レーザ光は想定した位置で物体の表面を反射し、反射光が戻る。一方で、遠い物体からの反射波は遅れて到着するため、受光した反射光は前の位置(やや左側)で物体を反射した光となってしまうことがある。言い換えれば、遠い物体の測定結果は、物体表面のやや左側の位置を測定したものとなる。物体との距離によって位置ずれの程度が異なるので、距離画像は面方向の歪みを含んだものとなっていた。
【課題を解決するための手段】
【0007】
前記課題を解決するため、本発明に係る測距装置は、
階層的に組み合わされた複数の周波数で変調された変調波形を生成する手段(20)と、
該変調波形を測定対象に走査して照射する手段(3)と、
該測定対象からの反射波を受光する手段(4)と、
該反射波から変調周波数それぞれの位相差を検出して対象物までの距離を算出する手段(23)と、
を備えた3次元測距装置であって、
既に行なった座標の測定結果に応じて座標の測定のタイミングを制御する手段(27)と、
を備える。
【発明の効果】
【0008】
本発明によれば、物体との距離によって生じる測定位置の位置ずれを防ぐことができるので、歪みがない距離画像を得ることが可能になるという効果がある。
【図面の簡単な説明】
【0009】
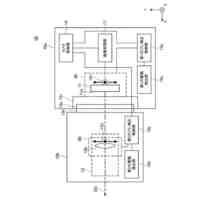
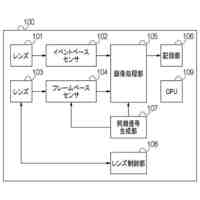
実施例1の測距装置の全体構成を示すブロック図
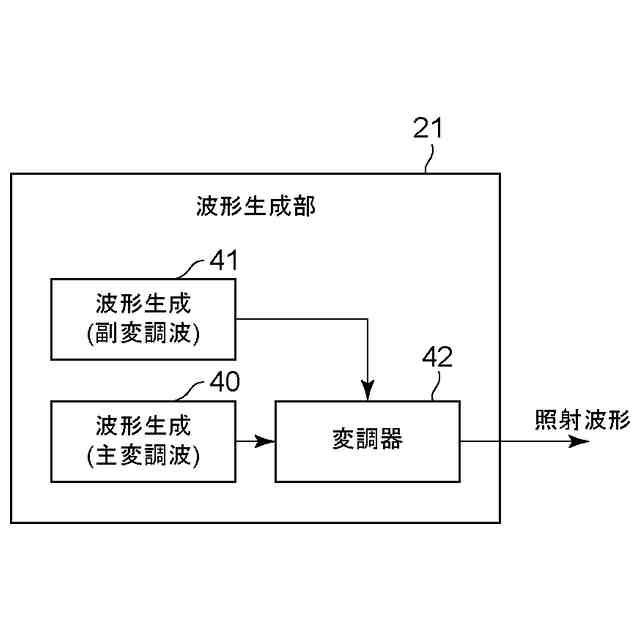
実施例1の波形生成部の概略構成を示すブロック図
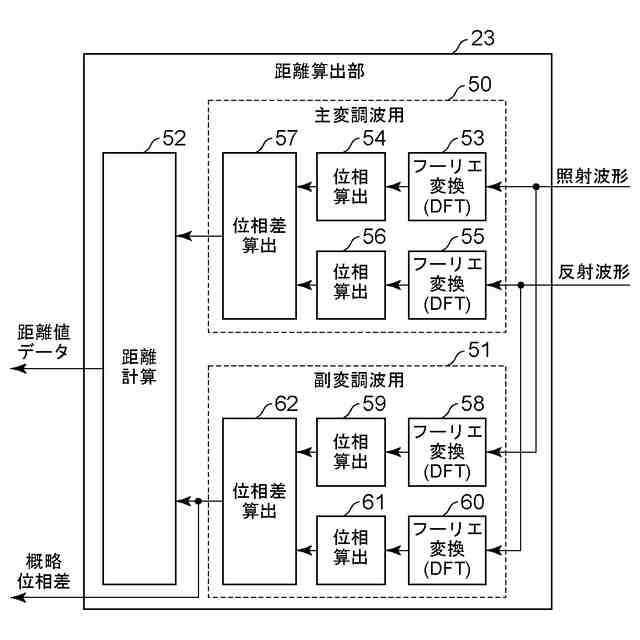
実施例1の距離算出部の概略構成を示すブロック図
実施例1の距離画像の画面例
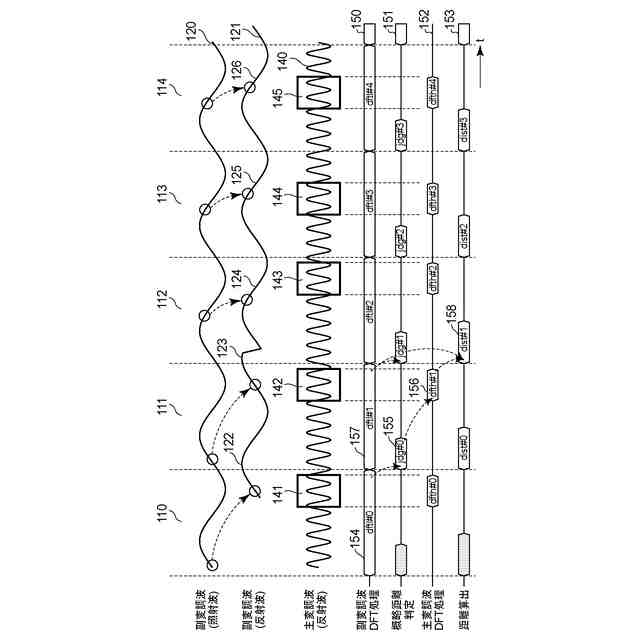
実施例1のデータ処理パイプラインのタイミング図
実施例1の距離画像作成の処理の流れを示すフローチャート
実施例1の測定ウィンドウの位置変更処理の動作例を示すタイミング図
実施例2の測距装置の全体構成を示すブロック図
実施例2のデータ処理パイプラインのタイミング図
【発明を実施するための形態】
【0010】
以下、添付の図面を参照して、本発明をその好適な実施例に基づいて詳細に説明する。なお、以下の実施例において示す構成は一例に過ぎず、本発明は図示された構成に限定されるものではない。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
容器
1か月前
キヤノン株式会社
容器
1か月前
キヤノン株式会社
顕微鏡
今日
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
定着装置
27日前
キヤノン株式会社
電気機器
1日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
定着装置
27日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
記録装置
今日
キヤノン株式会社
記録装置
27日前
キヤノン株式会社
記録装置
今日
キヤノン株式会社
定着装置
今日
キヤノン株式会社
撮像装置
29日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
電子機器
29日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
雲台装置
1か月前
キヤノン株式会社
記録装置
今日
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
定着装置
21日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
表示装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
記録装置
7日前
キヤノン株式会社
記録装置
7日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ