TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025180714
公報種別
公開特許公報(A)
公開日
2025-12-11
出願番号
2024088241
出願日
2024-05-30
発明の名称
静電モータ
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
H02N
1/00 20060101AFI20251204BHJP(電力の発電,変換,配電)
要約
【課題】簡素な構造で、軽量化を図るようにした静電モータ1を提供する。
【解決手段】
静電モータ1では、ステータ電極50a~50h、51a~51h、52a~52h、53a~53hの全ての極性が負極に設定される。このため、ステータ10に沿面放電が発生しない。ロータ電極60a~60h、61a~61h、62a~62hの全ての極性が、正極および負極のうち一方の極性から他方の極性に順次切り替えられる。このため、ロータ20にも沿面放電が発生しない。よって、ステータ10、ロータ20において、電気絶縁部材を排除することができる。
【選択図】図1
特許請求の範囲
【請求項1】
軸線(S)を中心とする円周方向に等間隔に並べられている複数のステータ電極(50、50a~50h、51a~51h、52a~52h、53a~53h)を有するステータ(10)と、
前記軸線を中心とする円周方向に等間隔に並べられている複数のロータ電極(60a~60h、61a~61h、62a~62h、60)を有し、前記ステータに対して前記軸線を中心とする回転方向(Ka)の一方側に回転が自在になるように構成されているロータ(20)と、
前記複数のステータ電極および前記複数のロータ電極のうち一方の複数の電極を複数の一方側電極とし、前記ステータ電極および前記ロータ電極のうち前記複数の一方側電極以外の電極を複数の他方側電極とした場合において、
前記複数の一方側電極の極性を正極および負極のうちいずれか一方の極性に設定し、前記複数の他方側電極の極性を、前記正極および前記負極のうち一方の極性から他方の極性に順次切り替えることにより、前記複数のロータ電極および前記複数のステータ電極の間に生じる静電気力による引力によって前記ロータを前記回転方向の一方側に回転させる回転トルクを前記ロータに発生させる制御部(2)と、
を備える静電モータ。
続きを表示(約 3,500 文字)
【請求項2】
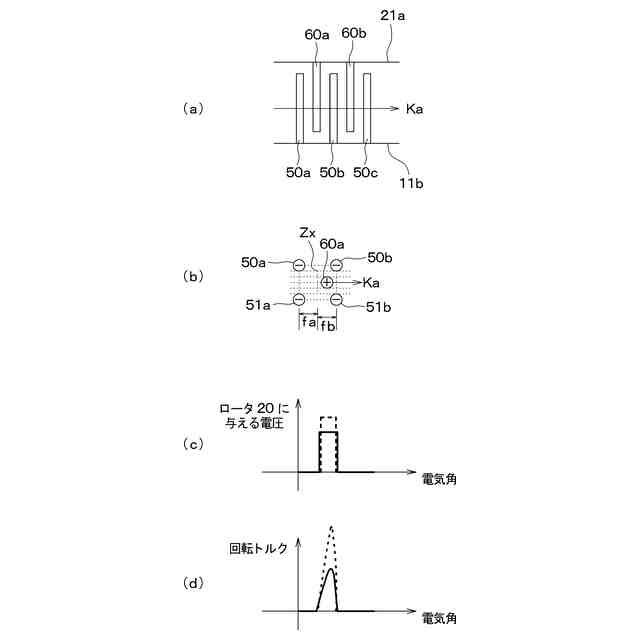
前記複数のステータ電極において前記回転方向に隣り合う2つのステータ電極のうち前記回転方向の一方側に位置するステータ電極を、一方側ステータ電極とし、前記隣り合う2つのステータ電極のうち前記回転方向の他方側に位置するステータ電極を、他方側ステータ電極とし、前記回転方向において前記一方側ステータ電極および前記他方側ステータ電極の間の中間位置を、回転方向中間位置(Zx)とした場合において、
前記複数のロータ電極における前記軸線を中心とする角度を検出する角度センサ(34)を備え、
前記複数のステータ電極と前記複数のロータ電極とは、同一の間隔で前記円周方向に並べられており、
前記複数のステータ電極が前記複数の一方側電極であり、前記複数のロータ電極が前記複数の他方側電極であり、
前記複数のステータ電極のそれぞれの極性が前記制御部によって負極に設定されており、
前記制御部は、前記角度センサの検出角度に基づいて、前記回転方向中間位置および前記一方側ステータ電極の間における前記軸線を中心とする第1角度範囲(fb)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のロータ電極の極性を正極に設定することによって前記ロータに前記回転トルクを発生させ、
前記制御部は、前記角度センサの検出角度に基づいて、前記他方側ステータ電極および前記回転方向中間位置の間における前記軸線を中心とする第2角度範囲(fa)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のロータ電極の極性を負極に設定することによって前記ロータを慣性によって前記回転方向の一方側に回転させる請求項1に記載の静電モータ。
【請求項3】
前記複数のステータ電極において前記回転方向に隣り合う2つのステータ電極のうち前記回転方向の一方側に位置するステータ電極を、一方側ステータ電極とし、前記隣り合う2つのステータ電極のうち前記回転方向の他方側に位置するステータ電極を、他方側ステータ電極とし、前記回転方向において前記一方側ステータ電極および前記他方側ステータ電極の間の中間位置を、回転方向中間位置(Zx)とした場合において、
前記複数のロータ電極における前記軸線を中心とする角度を検出する角度センサ(34)を備え、
前記複数のステータ電極と前記複数のロータ電極とは、同一の間隔で前記円周方向に並べられており、
前記複数のステータ電極が前記複数の一方側電極であり、前記複数のロータ電極が前記複数の他方側電極であり、
前記複数のステータ電極のそれぞれの極性が前記制御部によって正極に設定されており、
さらに前記制御部は、前記角度センサの検出角度に基づいて、前記回転方向中間位置および前記一方側ステータ電極の間における前記軸線を中心とする第1角度範囲(fb)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のロータ電極の極性を負極に設定することによって前記ロータに前記回転トルクを発生させ、
前記制御部は、前記角度センサの検出角度に基づいて、前記他方側ステータ電極および前記回転方向中間位置の間における前記軸線を中心とする第2角度範囲(fa)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のロータ電極の極性を正極に設定することによって前記ロータを慣性によって前記回転方向の一方側に回転させる請求項1に記載の静電モータ。
【請求項4】
前記複数のステータ電極において前記回転方向に隣り合う2つのステータ電極のうち前記回転方向の一方側に位置するステータ電極を一方側ステータ電極とし、前記隣り合う2つのステータ電極のうち前記回転方向の他方側に位置するステータ電極を他方側ステータ電極とし、前記回転方向において前記一方側ステータ電極および前記他方側ステータ電極の間の中間位置を回転方向中間位置(Zx)とした場合において、
前記複数のロータ電極における前記軸線を中心とする角度を検出する角度センサ(34)を備え、
前記複数のステータ電極と前記複数のロータ電極とは、同一の間隔で前記円周方向に並べられており、
前記複数のロータ電極が前記複数の一方側電極であり、前記複数のステータ電極が前記複数の他方側電極であり、
前記複数のロータ電極のそれぞれの極性が前記制御部によって負極に設定されており、
前記制御部は、前記角度センサの検出角度に基づいて、前記回転方向中間位置および前記一方側ステータ電極の間における前記軸線を中心とする第1角度範囲(fb)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のステータ電極の極性を正極に設定することによって前記ロータに前記回転トルクを発生させ、
前記制御部は、前記角度センサの検出角度に基づいて、前記他方側ステータ電極および前記回転方向中間位置の間における前記軸線を中心とする第2角度範囲(fa)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のステータ電極の極性を負極に設定することによって前記ロータを慣性によって前記回転方向の一方側に回転させる請求項1に記載の静電モータ。
【請求項5】
前記複数のステータ電極において前記回転方向に隣り合う2つのステータ電極のうち前記回転方向の一方側に位置するステータ電極を一方側ステータ電極とし、前記隣り合う2つのステータ電極のうち前記回転方向の他方側に位置するステータ電極を他方側ステータ電極とし、前記回転方向において前記一方側ステータ電極および前記他方側ステータ電極の間の中間位置を回転方向中間位置(Zx)とした場合において、
前記複数のロータ電極における前記軸線を中心とする角度を検出する角度センサ(34)を備え、
前記複数のステータ電極と前記複数のロータ電極とは、同一の間隔で前記円周方向に並べられており、
前記複数のロータ電極が前記複数の一方側電極であり、前記複数のステータ電極が前記複数の他方側電極であり、
前記複数のロータ電極のそれぞれの極性が前記制御部によって正極に設定されており、
前記制御部は、前記角度センサの検出角度に基づいて、前記回転方向中間位置および前記一方側ステータ電極の間における前記軸線を中心とする第1角度範囲(fb)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のステータ電極の極性を負極に設定することによって前記ロータに前記回転トルクを発生させ、
前記制御部は、前記角度センサの検出角度に基づいて、前記他方側ステータ電極および前記回転方向中間位置の間における前記軸線を中心とする第2角度範囲(fa)内に、前記複数のロータ電極が位置すると判定したとき、前記複数のステータ電極の極性を正極に設定することによって前記ロータを慣性によって前記回転方向の一方側に回転させる請求項1に記載の静電モータ。
【請求項6】
前記軸線が延びる方向を軸線方向としたとき、前記複数のステータ電極は、それぞれ、前記複数のロータ電極に対して前記軸線方向(Sz)にずれて配置されている請求項1に記載の静電モータ。
【請求項7】
前記複数のステータ電極は、それぞれ、前記複数のロータ電極に対して前記軸線を中心とする径方向(Cy)にずれて配置されている請求項1に記載の静電モータ。
【請求項8】
前記複数のステータ電極は、それぞれ、一体化されている一体化構成物を構成している請求項1に記載の静電モータ。
【請求項9】
前記複数のロータ電極は、それぞれ、一体化されている一体化構成物を構成している請求項1に記載の静電モータ。
【請求項10】
前記ステータは、前記複数のステータ電極のうち1つ以上のステータ電極が接続されている複数のステータ支持部(11)を備え、
前記ロータは、前記複数のロータ電極のうち1つ以上のロータ電極が接続されている複数のロータ支持部(21)を備え、
前記軸線が延びる方向を軸線方向としたとき、前記複数のステータ支持部は、それぞれ、前記軸線方向に並べられ、かつ連結されており、
前記複数のロータ支持部は、それぞれ、前記軸線方向に並べられ、かつ連結されている請求項1に記載の静電モータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、静電モータに関するものである。
続きを表示(約 4,100 文字)
【背景技術】
【0002】
従来、静電モータにおいて、複数の第1ステータ電極と複数の第2ステータ電極とを備えるステータと、このステータに対して軸線方向に配置されて複数のロータ電極を備えるロータとを備えるものが提案されている(例えば、特許文献1参照)。複数の第1ステータ電極と複数の第2ステータ電極とは、1つずつ、軸線を中心とする円周方向に交互に並べられている。
【0003】
複数のロータ電極は、それぞれ、複数の第1ステータ電極および複数の第2ステータ電極に対して軸線を中心とする径方向に配置されている。複数の第1ステータ電極に正電圧が与えられ、複数の第2ステータ電極に負電圧が与えられる。ロータ電極が第1ステータ電極に対して回転方向の他方側に位置するとき、ロータ電極には負電圧が与えられる。これにより、ロータ電極には、第1ステータ電極に対する静電気力による引力に起因してロータを回転方向の一方側へ回転させるトルクが生じる。
【0004】
その後、ロータ電極が第1ステータ電極に対して回転方向の一方側に位置するときには、ロータ電極には正電圧が与えられる。このことにより、ロータ電極は、第1ステータ電極に対する静電気力による反力と第2ステータ電極に対する静電気力による引力に起因してロータを回転方向の一方側へ回転させるトルクが生じる。このように、ロータ電極に与える電圧を、正電圧および負電圧のうち一方から他方へ切り替えることにより、ロータ電極、ひいては、ロータを回転させる回転トルクを発生させる。
【先行技術文献】
【特許文献】
【0005】
特開2013-48557号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記静電モータにおいて、ロータ電極に与える電圧を正電圧および負電圧のうち一方から他方へ切り替えることにより、ロータを回転させる回転トルクが発生させる。しかしながら、複数の第1ステータ電極に正電圧が与えられ、複数の第2ステータ電極に負電圧が与えられる。このため、静電モータの出力を高くするには、複数の第1ステータ電極と複数の第2ステータ電極との間に電圧差を大きくすることが必要になる。
【0007】
この場合、複数の第1ステータ電極と複数の第2ステータ電極との間の電気絶縁を確保することが困難となる。したがって、複数の第1ステータ電極と複数の第2ステータ電極との間の沿面放電の発生を抑えるために、複数の第1ステータ電極と複数の第2ステータ電極との間に電気絶縁部材を配置することが必要になる。これにより、静電モータの重量が重くなる。
本開示は上記点に鑑みて、軽量化を図るようにした静電モータを提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示の1つの観点によれば、静電モータは、
軸線(S)を中心とする円周方向に等間隔に並べられている複数のステータ電極(50、50a~50h、51a~51h、52a~52h、53a~53h)を有するステータ(10)と、
軸線を中心とする円周方向に等間隔に並べられている複数のロータ電極(60、60a~60h、61a~61h、62a~62h)を有し、ステータに対して軸線を中心とする回転方向(Ka)の一方側に回転が自在になるように構成されているロータ(20)と、
複数のステータ電極および複数のロータ電極のうち一方の複数の電極を複数の一方側電極とし、ステータ電極およびロータ電極のうち複数の一方側電極以外の電極を複数の他方側電極とした場合において、
複数の一方側電極の極性を正極および負極のうちいずれか一方の極性に設定し、複数の他方側電極の極性を、正極および負極のうち一方の極性から他方の極性に順次切り替えることにより、複数のロータ電極および複数のステータ電極の間に生じる静電気力による引力によってロータを回転方向の一方側に回転させる回転トルクをロータに発生させる制御部(2)と、を備える。
【0009】
したがって、複数の一方側電極の極性が全て正極および負極のうちいずれか一方の極性に設定され、複数の他方側電極の極性が、全て、正極および負極のうち一方の極性から他方の極性に順次切り替えられる。このため、複数のステータ電極において、沿面放電が発生することを抑えることができる。複数のロータ電極において、沿面放電が発生することを抑えることができる。これにより、複数のステータ電極、複数のロータ電極のそれぞれに、電気絶縁部材が設けられていない。したがって、複数のステータ電極、複数のロータ電極のそれぞれにおいて、電気絶縁部材を排除することにより、軽量化を図るようにした静電モータを提供することができる。
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0010】
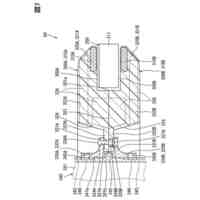
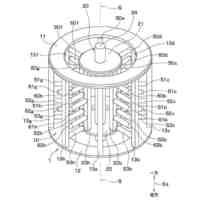
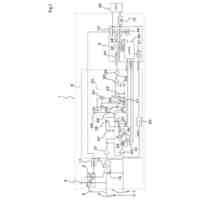
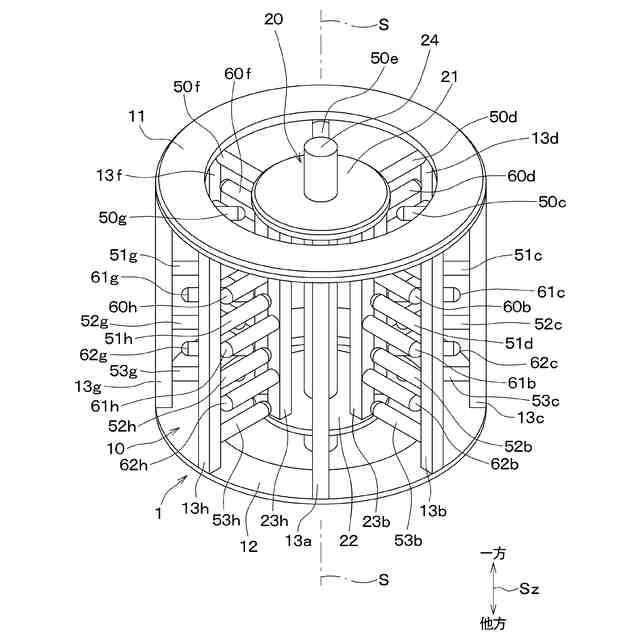
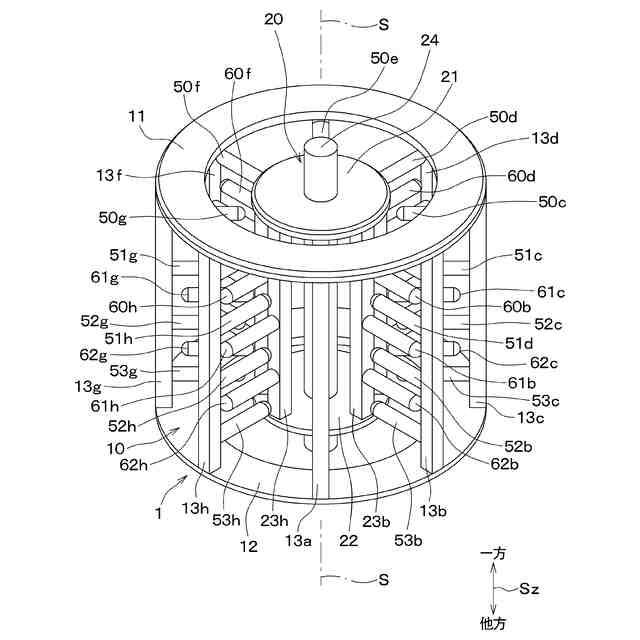
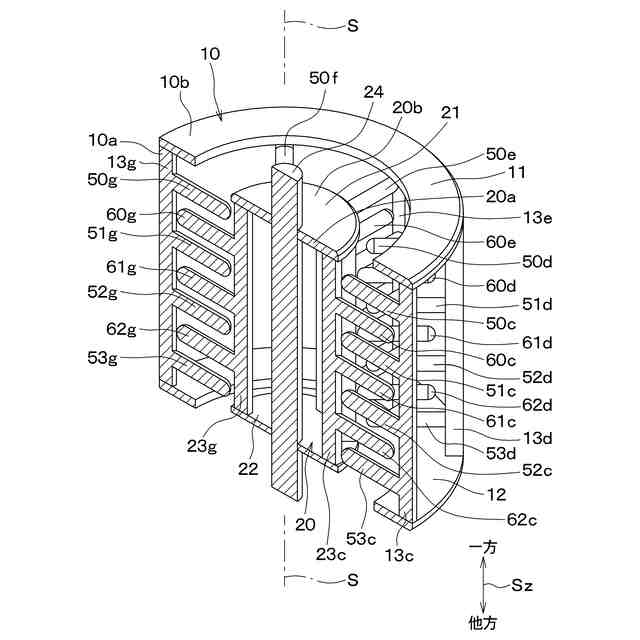
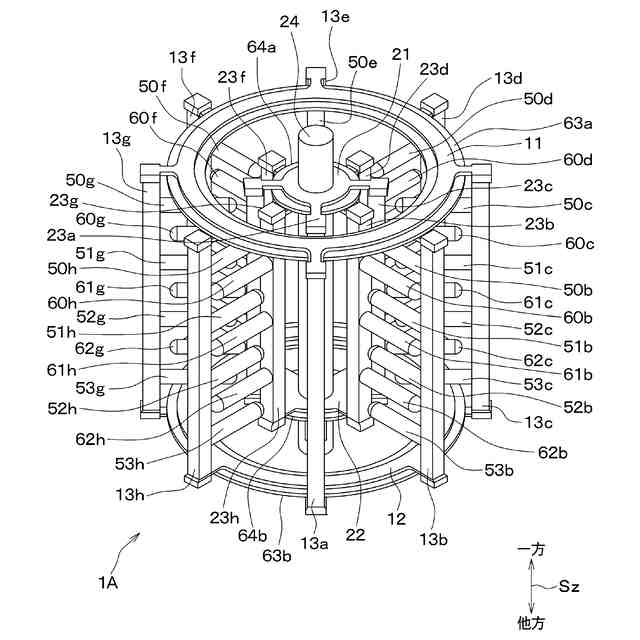
本開示の第1実施形態における静電モータの全体構成を示す斜視図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための斜視図である。
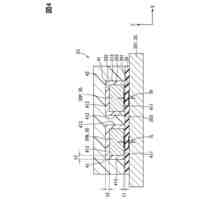
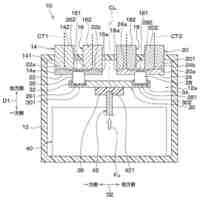
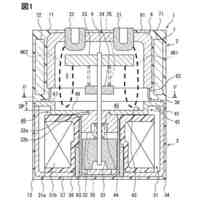
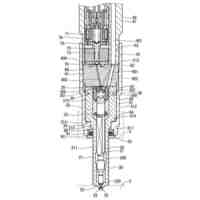
図1の第1実施形態における静電モータにおいて軸線を含む仮想面で切断した断面図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための図である。
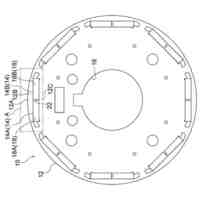
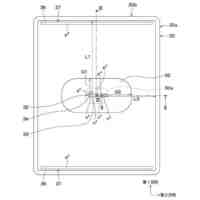
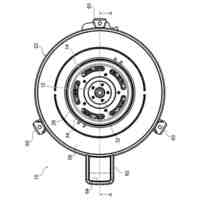
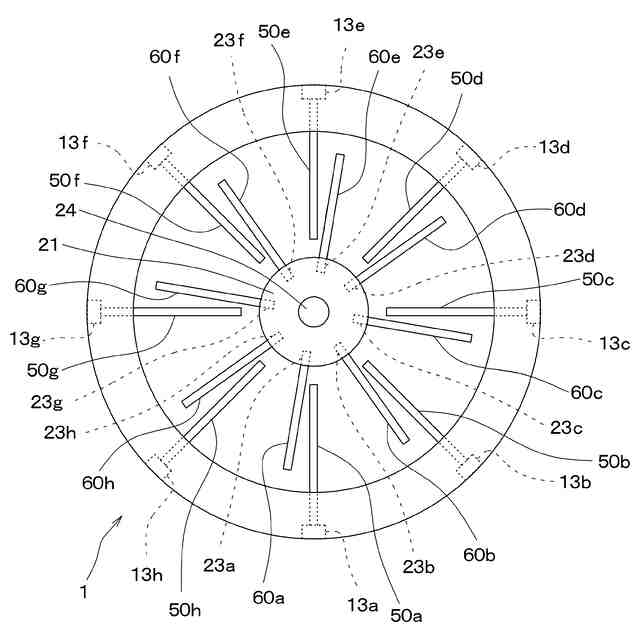
図1の第1実施形態における静電モータの上面図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための図である。
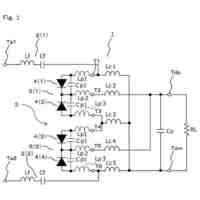
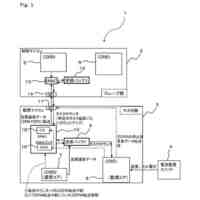
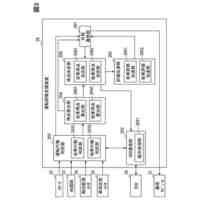
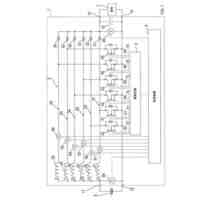
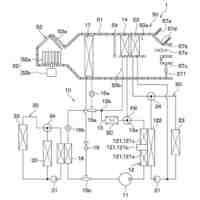
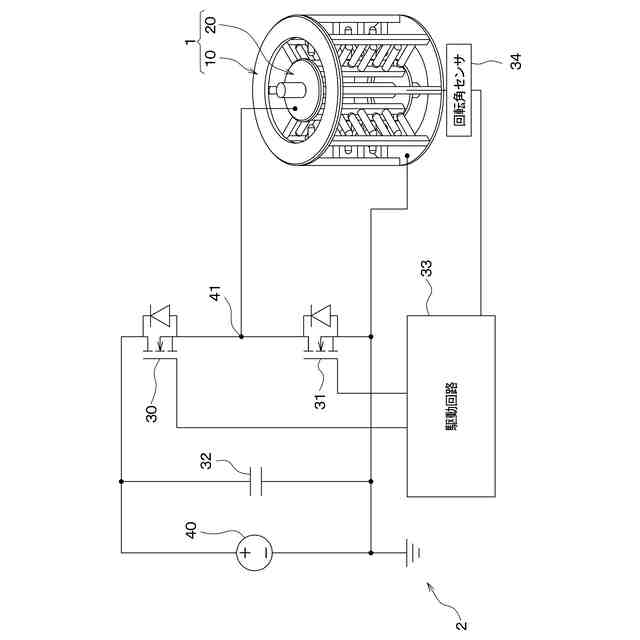
図1の第1実施形態における静電モータのロータを作動させるためのインバータ回路の電気回路構成を示す電気回路図である。
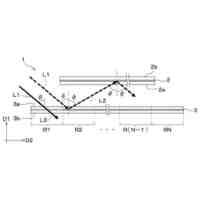
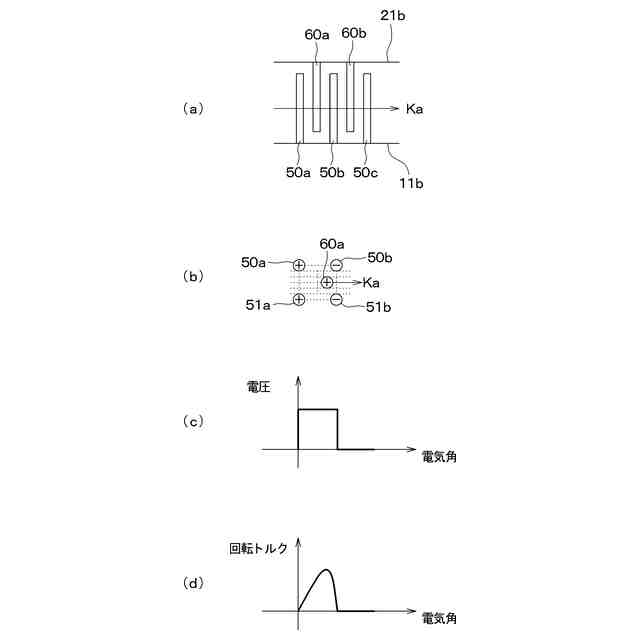
図1の第1実施形態における静電モータにロータ電極およびステータ電極の配置関係、ロータ電極およびステータ電極のそれぞれの極性、ロータ電極に与えられる電圧、および、ロータに生じる回転トルクを示す図である。
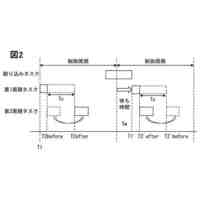
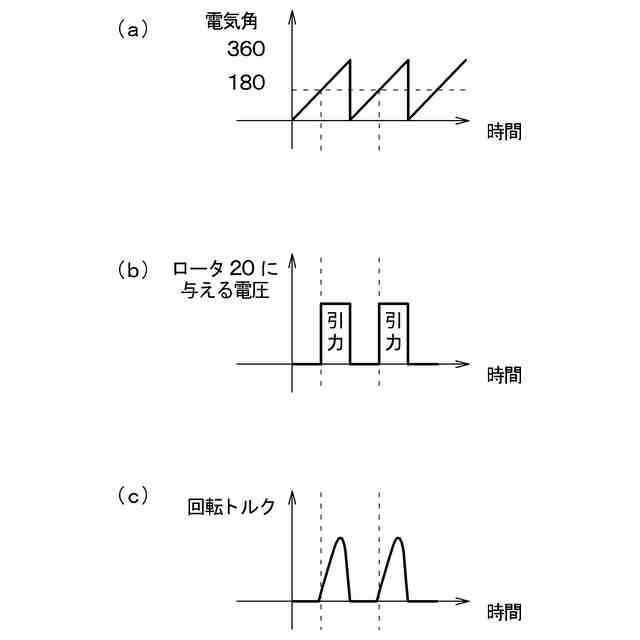
図1の第1実施形態における静電モータにおいて、時間と電気角との関係、ロータ電極に与えられる電圧と時間との関係、ロータ電極に生じる回転トルクと時間との関係を示す図である。
対比例における静電モータの全体構成を示す斜視図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための斜視図である。
図7の対比例における静電モータにおいて、時間と電気角との関係、ロータ電極に与えられる電圧と時間との関係、ロータ電極に生じる回転トルクと時間との関係を示す図である。
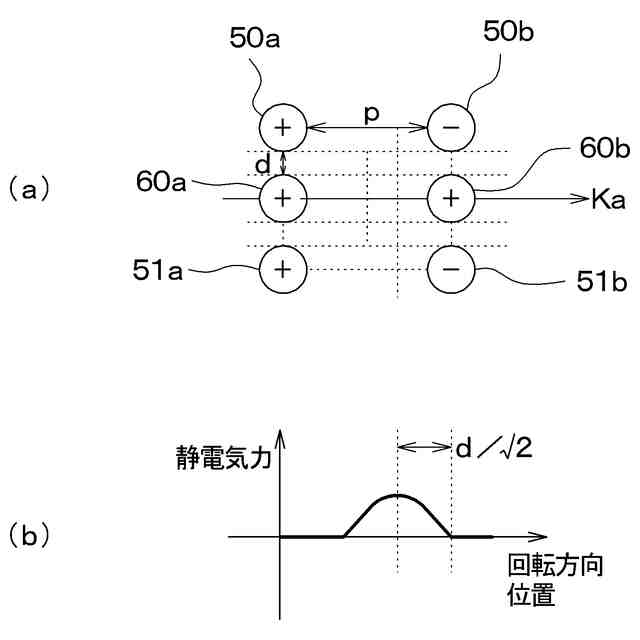
図1の第1実施形態における静電モータの電極構成の最適化の説明に用いるテータ電極およびロータ電極の間の距離、ロータに生じる静電気力および回転方向位置の関係を示す図である。
図1の第1実施形態における静電モータにおいて、回転トルクおよび極数の関係を示す図である。
本開示の第2実施形態における静電モータのロータを作動させるためのインバータ回路の電気回路構成を示す電気回路図である。
図11の第2実施形態における静電モータにおいて、時間と電気角の関係、ロータ電極に与えられる電圧と時間との関係、ロータ電極に生じる回転トルクと時間との関係を示す図である。
本開示の第3実施形態における静電モータのロータを作動させるためのインバータ回路の電気回路構成を示す電気回路図である。
図13の第3実施形態における静電モータにおいて、時間と電気角の関係、ロータ電極に与えられる電圧と時間との関係、ロータ電極に生じる回転トルクと時間との関係を示す図である。
本開示の第4実施形態における静電モータのロータを作動させるためのインバータ回路の電気回路構成を示す電気回路図である。
図15の第4実施形態における静電モータにおいて、時間と電気角の関係、ロータ電極に与えられる電圧と時間との関係、ロータ電極に生じる回転トルクと時間との関係を示す図である。
本開示の第5実施形態における静電モータにおいて軸線を含む仮想面で切断した断面図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための図である。
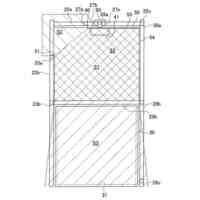
図17の第5実施形態における静電モータにおいて複数のステータ電極、および複数のロータ電極の配置関係を示す図であり、複数のステータ電極、および複数のロータ電極を軸線に直交する仮想面で切断した断面図である。
本開示の第6実施形態における静電モータにおいて軸線を含む仮想面で切断した断面図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための図である。
本開示の第7実施形態における静電モータの全体構成を示す斜視図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための斜視図である。
図20の第7実施形態における静電モータのステータの構成の説明を補助するための斜視図である。
図20の第7実施形態における静電モータのステータの構成の説明を補助するための断面図である。
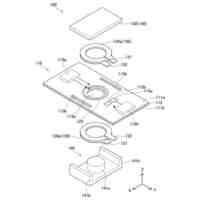
図20の第7実施形態における静電モータのロータの構成の説明を補助するための斜視図である。
本開示の第8実施形態における静電モータの全体構成を示す斜視図であり、複数のステータ電極、および複数のロータ電極の配置関係の説明を補助するための斜視図である。
図24の第8実施形態における静電モータを構成する1つのモータ本体部を示す斜視図である。
図24の第8実施形態におけるモータ本体部を構成するステータ本体部を示す斜視図である。
図24の第8実施形態におけるモータ本体部を構成するロータ本体部を示す斜視図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
ロータ
8日前
株式会社デンソー
電動機
13日前
株式会社デンソー
ロータ
8日前
株式会社デンソー
分離体
21日前
株式会社デンソー
端子台
15日前
株式会社デンソー
整流回路
6日前
株式会社デンソー
トランス
13日前
株式会社デンソー
回転電機
6日前
株式会社デンソー
光学部材
13日前
株式会社デンソー
電子装置
13日前
株式会社デンソーエレクトロニクス
電磁継電器
7日前
株式会社デンソー
音低減装置
6日前
株式会社デンソー
静電モータ
今日
株式会社デンソー
レーダ装置
7日前
株式会社デンソー
電磁継電器
13日前
株式会社デンソー
半導体装置
21日前
株式会社デンソー
半導体装置
1日前
株式会社デンソー
電子制御装置
1日前
株式会社デンソー
電子制御装置
6日前
株式会社デンソー
電力変換装置
13日前
株式会社デンソー
衝突判定装置
2日前
株式会社デンソー
燃料噴射装置
14日前
株式会社デンソー
表面加工方法
14日前
株式会社デンソー
電気化学セル
14日前
株式会社デンソー
電子制御装置
13日前
株式会社デンソー
電子制御装置
1日前
株式会社デンソー
電子制御装置
今日
株式会社デンソー
形状検査方法
15日前
株式会社デンソー
電磁弁駆動装置
13日前
株式会社デンソー
液体分離システム
21日前
株式会社デンソー
運転評価支援装置
13日前
株式会社デンソー
電力変換制御装置
今日
株式会社デンソー
ブラシレスモータ
今日
株式会社デンソー
冷凍サイクル装置
6日前
株式会社デンソー
電気化学反応装置
15日前
株式会社デンソーウェーブ
投入品管理用装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ