TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025178649
公報種別
公開特許公報(A)
公開日
2025-12-09
出願番号
2024085381
出願日
2024-05-27
発明の名称
箱詰めシステム
出願人
グローリー株式会社
代理人
個人
主分類
B65G
47/91 20060101AFI20251202BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】スペースをさらに有効活用することが可能な箱詰めシステムを提供する。
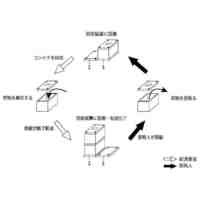
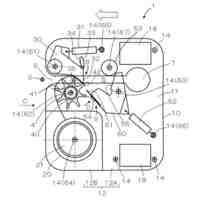
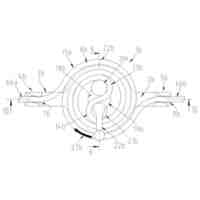
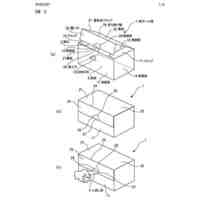
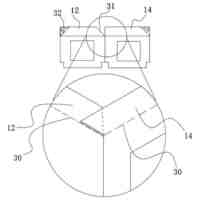
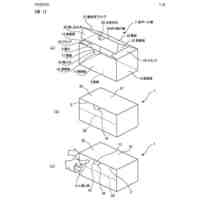
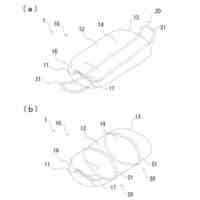
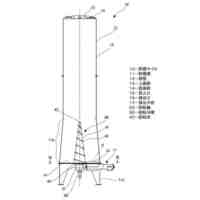
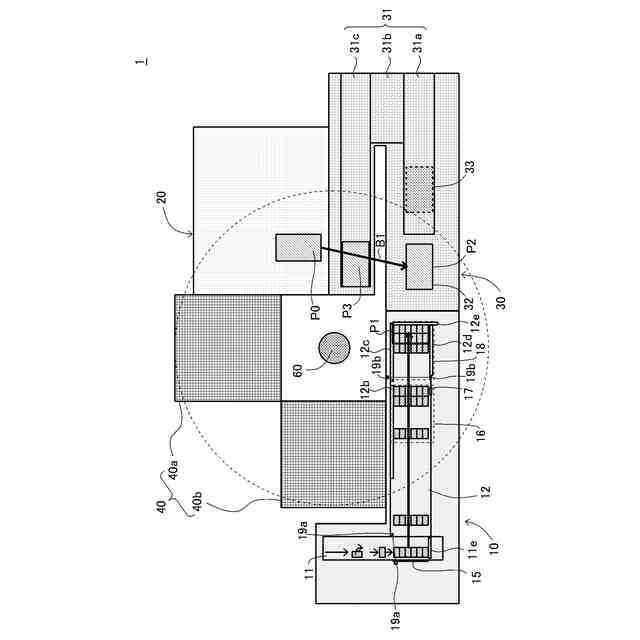
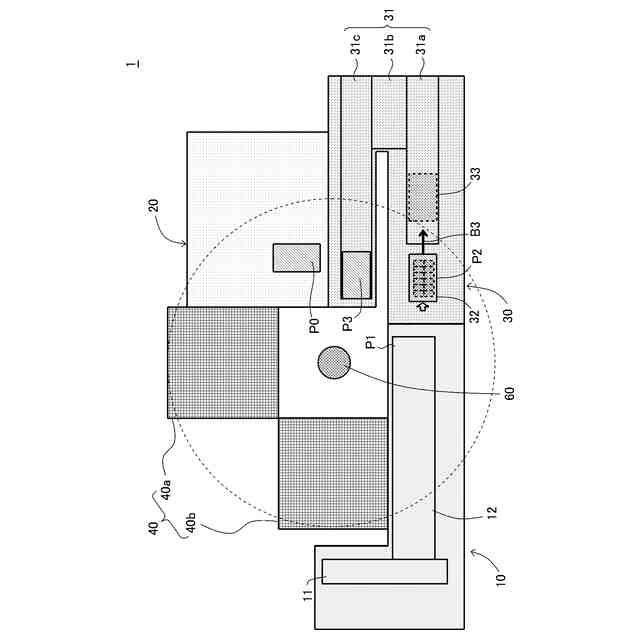
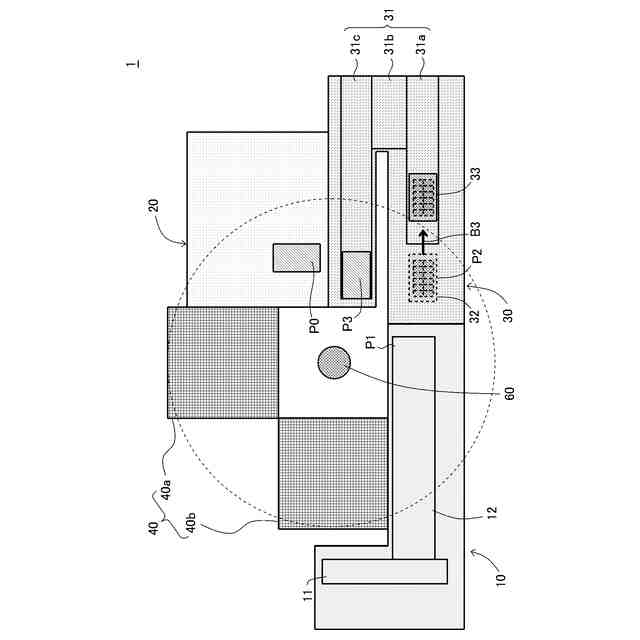
【解決手段】箱詰めシステム1は、複数の対象物(個装箱等)を第1待機位置P1へと搬送する対象物搬送部10と、複数の対象物を収容するためのダンボール箱90を成型する箱成型部20と、箱成型部20により成型され第2待機位置P2に存在するダンボール箱90の内部へと複数の対象物を箱詰めするロボット60と、複数の対象物が収容されたダンボール箱90を第3待機位置P3へと搬送するダンボール箱搬送部30と、ダンボール箱90を積載するためのパレットが載置されるパレット載置部40とを備える。ロボット60は、第1待機位置P1の複数の対象物を第2待機位置P2のダンボール箱90に箱詰めする作業のみならず、第3待機位置P3のダンボール箱90をパレット載置部40のパット上に移載する作業をも実行する。
【選択図】図4
特許請求の範囲
【請求項1】
複数の対象物を第1待機位置へと搬送する対象物搬送部と、
前記複数の対象物を収容するためのダンボール箱を成型する箱成型部と、
前記箱成型部により成型され第2待機位置に存在する前記ダンボール箱の内部へと、前記複数の対象物を箱詰めするロボットと、
前記複数の対象物が収容された前記ダンボール箱を第3待機位置へと搬送するダンボール箱搬送部と、
前記ダンボール箱を積載するためのパレットが載置されるパレット載置部と、
を備え、
前記ロボットは、
前記第1待機位置に移動した前記複数の対象物を、前記第2待機位置に存在する前記ダンボール箱に箱詰めする作業のみならず、
前記第3待機位置に移動した前記ダンボール箱を、前記パレット載置部の前記パレット上に移載する作業をも実行することを特徴とする箱詰めシステム。
続きを表示(約 1,800 文字)
【請求項2】
前記ダンボール箱搬送部は、前記第2待機位置を有し、
前記ロボットは、前記箱成型部の成型位置にて成型された前記ダンボール箱を前記成型位置から前記ダンボール箱搬送部の前記第2待機位置へと移動する作業をも実行することを特徴とする、請求項1に記載の箱詰めシステム。
【請求項3】
前記箱成型部は、前記ダンボール箱搬送部の上流部に対して搬送コンベヤでは繋がっていない状態で配置されることを特徴とする、請求項2に記載の箱詰めシステム。
【請求項4】
前記ダンボール箱搬送部は、前記第2待機位置にて箱詰めされた前記ダンボール箱を前記ロボットから遠ざかる向きに一旦移動した後に前記ロボットに近づく向きに移動する搬送経路を有しており、
前記搬送経路は、第1サブ経路と第2サブ経路と第3サブ経路とを有しており、
前記第1サブ経路は、前記第2待機位置にて箱詰めされた前記ダンボール箱を前記ロボットから遠ざかる向きに一旦移動する経路であり、
前記第2サブ経路は、前記第1サブ経路を移動してきた前記ダンボール箱を前記第3サブ経路に移動する経路であり、
前記第3サブ経路は、前記第1サブ経路と前記第2サブ経路とを移動してきた前記ダンボール箱を前記ロボットに近づく向きに移動する経路であり、
前記第3待機位置は、前記第3サブ経路の下流端に設けられていることを特徴とする、請求項3に記載の箱詰めシステム。
【請求項5】
前記第2待機位置および前記第3待機位置は、前記第1待機位置と前記成型位置との間に設けられることを特徴とする、請求項4に記載の箱詰めシステム。
【請求項6】
前記第3待機位置は、前記第2待機位置と前記成型位置との間に設けられることを特徴とする、請求項4に記載の箱詰めシステム。
【請求項7】
前記箱成型部は、前記第1サブ経路には隣接せず且つ前記第3サブ経路に隣接して配置されることを特徴とする、請求項4に記載の箱詰めシステム。
【請求項8】
前記対象物搬送部は、前記ダンボール箱搬送部の上流側に配置され、
前記第1待機位置は、前記対象物搬送部の下流端に設けられ、
前記第2待機位置は、前記ダンボール箱搬送部の上流端に設けられ、
前記対象物搬送部の前記第1待機位置は、前記ダンボール箱搬送部の前記第2待機位置の近傍に設けられることを特徴とする、請求項7に記載の箱詰めシステム。
【請求項9】
前記第1待機位置と前記第2待機位置と前記第3待機位置と前記成型位置とは、前記ロボットの周囲を4つに大別する4つの側方領域のうち、互いに隣接する2つの側方である第1側方領域と第2側方領域とに亘って設けられ、
前記パレット載置部は、前記4つの側方領域のうちの残りの2つの側方領域である第3側方領域と第4側方領域とに設けられ、
前記第1待機位置は、前記第1側方領域に設けられ、
前記第3待機位置は、前記第1側方領域に隣接する前記第2側方領域に設けられ、
前記第2待機位置は、前記第1待機位置と前記第3待機位置との間において、前記第1待機位置に隣接する位置に設けられ、
前記成型位置は、前記第2側方領域に設けられ、
前記パレット載置部は、パレットをそれぞれ載置することが可能な第1パレット載置部と第2パレット載置部とを備え、
前記第1パレット載置部は、前記第3側方領域に設けられ、
前記第2パレット載置部は、前記第4側方領域に設けられることを特徴とする、請求項8に記載の箱詰めシステム。
【請求項10】
前記第1待機位置と前記第2待機位置と前記第3待機位置と前記成型位置とは、前記ロボットの周囲を4つに大別する4つの側方領域のうち、互いに隣接する2つの側方である第1側方領域と第2側方領域とに亘って設けられ、
前記パレット載置部は、前記4つの側方領域のうちの残りの2つの側方領域である第3側方領域と第4側方領域との少なくとも一方に設けられることを特徴とする、請求項2に記載の箱詰めシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の対象物をダンボール箱に箱詰めする箱詰めシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ロボットが複数の対象物を外箱(ダンボール箱、ケース等)に自動的に箱詰めする箱詰めシステムが存在する(特許文献1等参照)。また、箱詰め後の当該外箱(ダンボール箱等)をロボットがパレット上に自動的にパレタイズするパレタイズシステムが、別途のシステムとして存在する。
【先行技術文献】
【特許文献】
【0003】
特開2010-285183号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来においては、複数の対象物をダンボール箱に箱詰めし且つ箱詰め後の当該ダンボール箱をパレット上にパレタイズする作業を自動化する際には、上述のような2つのシステムが用いられる。その場合、複数の対象物をダンボール箱に自動的に箱詰めする箱詰めシステムにおいては1台のロボットが用いられ、別途のパレタイズシステムでは別途のロボットが用いられる。それ故、少なくとも2台のロボットを用いることが求められる。
【0005】
このように従来においては、2台のロボットを要し当該2台のロボットの配置スペースを要するため、必ずしもスペースを有効に活用できておらず、改善の余地がある。
【0006】
そこで、この発明は、スペースをさらに有効活用することが可能な技術を提供することを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決すべく、本発明に係る箱詰めシステムは、複数の対象物を第1待機位置へと搬送する対象物搬送部と、前記複数の対象物を収容するためのダンボール箱を成型する箱成型部と、前記箱成型部により成型され第2待機位置に存在する前記ダンボール箱の内部へと、前記複数の対象物を箱詰めするロボットと、前記複数の対象物が収容された前記ダンボール箱を第3待機位置へと搬送するダンボール箱搬送部と、前記ダンボール箱を積載するためのパレットが載置されるパレット載置部と、を備え、前記ロボットは、前記第1待機位置に移動した前記複数の対象物を、前記第2待機位置に存在する前記ダンボール箱に箱詰めする作業のみならず、前記第3待機位置に移動した前記ダンボール箱を、前記パレット載置部の前記パレット上に移載する作業をも実行することを特徴とする。
【0008】
前記ダンボール箱搬送部は、前記第2待機位置を有し、前記ロボットは、前記箱成型部の成型位置にて成型された前記ダンボール箱を前記成型位置から前記ダンボール箱搬送部の前記第2待機位置へと移動する作業をも実行してもよい。
【0009】
前記箱成型部は、前記ダンボール箱搬送部の上流部に対して搬送コンベヤでは繋がっていない状態で配置されてもよい。
【0010】
前記ダンボール箱搬送部は、前記第2待機位置にて箱詰めされた前記ダンボール箱を前記ロボットから遠ざかる向きに一旦移動した後に前記ロボットに近づく向きに移動する搬送経路を有しており、前記搬送経路は、第1サブ経路と第2サブ経路と第3サブ経路とを有しており、前記第1サブ経路は、前記第2待機位置にて箱詰めされた前記ダンボール箱を前記ロボットから遠ざかる向きに一旦移動する経路であり、前記第2サブ経路は、前記第1サブ経路を移動してきた前記ダンボール箱を前記第3サブ経路に移動する経路であり、前記第3サブ経路は、前記第1サブ経路と前記第2サブ経路とを移動してきた前記ダンボール箱を前記ロボットに近づく向きに移動する経路であり、前記第3待機位置は、前記第3サブ経路の下流端に設けられてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
グローリー株式会社
監視システム
11日前
グローリー株式会社
箱詰めシステム
今日
グローリー株式会社
確認システムおよび確認装置
4日前
グローリー株式会社
各台装置、遊技システム及び報知方法
13日前
グローリー株式会社
呼出システム、呼出プログラム及び呼出方法
11日前
グローリー株式会社
情報処理システム、プログラムおよび監視方法
5日前
グローリー株式会社
遊技管理システム、各台装置及び遊技管理方法
11日前
グローリー株式会社
遊技システム、制御装置及び遠隔遊技制御方法
12日前
個人
収容箱
4か月前
個人
束ね具
28日前
個人
コンベア
6か月前
個人
段ボール箱
8か月前
個人
容器
10か月前
個人
ゴミ収集器
8か月前
個人
段ボール箱
8か月前
個人
角筒状構造体
7か月前
個人
土嚢運搬器具
9か月前
個人
楽ちんハンド
6か月前
個人
バンド
3か月前
個人
宅配システム
8か月前
個人
テープ引出機
28日前
個人
閉塞装置
11か月前
個人
棒状体収容容器
1か月前
個人
コード類収納具
9か月前
個人
包装容器
2か月前
個人
廃棄物収容容器
4か月前
個人
お薬の締結装置
7か月前
株式会社和気
包装用箱
10か月前
個人
積み重ね用補助具
4か月前
個人
蓋閉止構造
5か月前
株式会社コロナ
梱包材
7か月前
個人
蓋閉止構造
5か月前
株式会社バンダイ
物品
2か月前
株式会社和気
包装用箱
1か月前
個人
把手付米袋
6か月前
個人
貯蔵サイロ
8か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ