TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177399
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084202
出願日
2024-05-23
発明の名称
遠隔支援システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/09 20060101AFI20251128BHJP(信号)
要約
【課題】遠隔支援を行う遠隔支援者の負荷をさらに軽減する。
【解決手段】遠隔支援システムは、1又は複数のプロセッサを備える。1又は複数のプロセッサは、自動運転車両から要求される遠隔支援の内容に応じて分割して得られ且つ実行順序が定められた複数のタスクを取得するように構成されている。そして、1又は複数のプロセッサは、上記実行順序に従って複数のタスクを遠隔支援者に行わせるように、遠隔支援者によって操作される遠隔支援端末に複数のタスクの実行に必要な1又は複数の映像を表示する表示処理を実行するように構成されている。
【選択図】図2
特許請求の範囲
【請求項1】
自動運転車両から要求される遠隔支援の内容に応じて分割して得られ且つ実行順序が定められた複数のタスクを取得し、
前記実行順序に従って前記複数のタスクを遠隔支援者に行わせるように、前記遠隔支援者によって操作される遠隔支援端末に前記複数のタスクの実行に必要な1又は複数の映像を表示する表示処理を実行する
ように構成された1又は複数のプロセッサを備える
遠隔支援システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の遠隔支援システムであって、
前記1又は複数の映像は、複数の映像を含み、
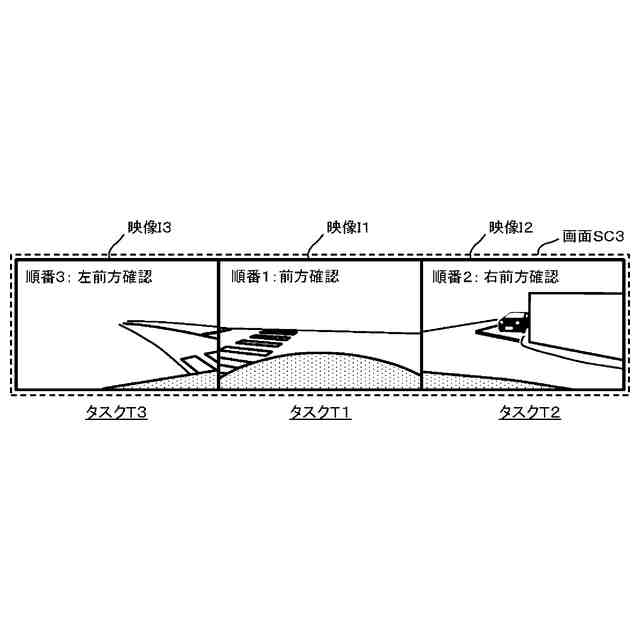
前記表示処理において、前記1又は複数のプロセッサは、前記実行順序に従って前記複数の映像を前記遠隔支援端末の画面の所定位置に1つずつ表示する
遠隔支援システム。
【請求項3】
請求項1に記載の遠隔支援システムであって、
前記表示処理において、前記1又は複数のプロセッサは、前記実行順序を示す補助表示を前記遠隔支援端末の画面に表示する
遠隔支援システム。
【請求項4】
請求項1から3の何れか1つに記載の遠隔支援システムであって、
前記1又は複数の映像は、複数の映像を含み、
前記複数の映像は、1又は複数のカメラにより撮影される前記自動運転車両の複数の周辺状況の映像であり、
前記複数のタスクのそれぞれは、前記複数の周辺状況に含まれる周辺状況についての判断を行うことを前記遠隔支援者に求めるものであり、
前記1又は複数のプロセッサは、
前記複数のタスクに含まれるタスクが完了した場合、完了した前記タスクである完了タスクにおいて前記判断の対象となる前記周辺状況の映像の類似度を前記完了タスクの完了時を基準として算出し、
前記類似度が閾値より低い場合、前記遠隔支援端末を介して前記遠隔支援者に前記完了タスクの再実行を要求し、
前記類似度が前記閾値より低くない場合、前記完了タスクの再実行を要求しない
遠隔支援システム。
【請求項5】
請求項1から3の何れか1つに記載の遠隔支援システムであって、
前記1又は複数の映像は、複数の映像を含み、
前記複数の映像は、1又は複数のカメラにより撮影される前記自動運転車両の複数の周辺状況の映像であり、
前記複数のタスクのそれぞれは、前記複数の周辺状況に含まれる周辺状況についての判断を行うことを前記遠隔支援者に求めるものであり、
前記1又は複数のプロセッサは、
前記複数のタスクに含まれるタスクが完了した後、完了した前記タスクである完了タスクの完了時から所定時間が経過した時に、前記完了タスクにおいて前記判断の対象となる前記周辺状況の映像の類似度を前記完了タスクの完了時を基準として算出し、
前記類似度が閾値より低い場合、前記遠隔支援端末を介して前記遠隔支援者に前記完了タスクの再実行を要求し、
前記類似度が前記閾値より低くない場合、前記完了タスクの再実行を要求しない
遠隔支援システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動運転車両を遠隔で支援する技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、遠隔支援システムを開示している。遠隔支援システムは、自動運転車両による支援要求処理の実績をシーン毎に示す実績データベースに基づいて、支援処理と委任処理の組み合わせの推奨選択肢を決定する。そして、遠隔支援システムは、決定された推奨選択肢をオペレータに提示する。支援処理は、対象自動運転車両の代わりにオペレータが行う車両処理である。一方、委任処理は、オペレータが対象自動運転車両に任せる処理である。
【0003】
また、特許文献2は、遠隔支援サーバを開示している。遠隔支援サーバは、少なくとも2台の車両からの遠隔支援の要求を同一時間帯に受信した場合、これらの車両を少なくとも1つのグループに編成し、少なくとも1つのグループにおける車両の支援順序をグループ毎に決定し、少なくとも1つのグループに編成された車両の遠隔支援を行う少なくとも1基の支援装置に、当該車両の周囲画像情報を支援順序に従って送信する。
【先行技術文献】
【特許文献】
【0004】
特開2022-148824号公報
特開2023-054400号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
遠隔支援を行う遠隔支援者の負荷をさらに軽減することが望まれる。
【課題を解決するための手段】
【0006】
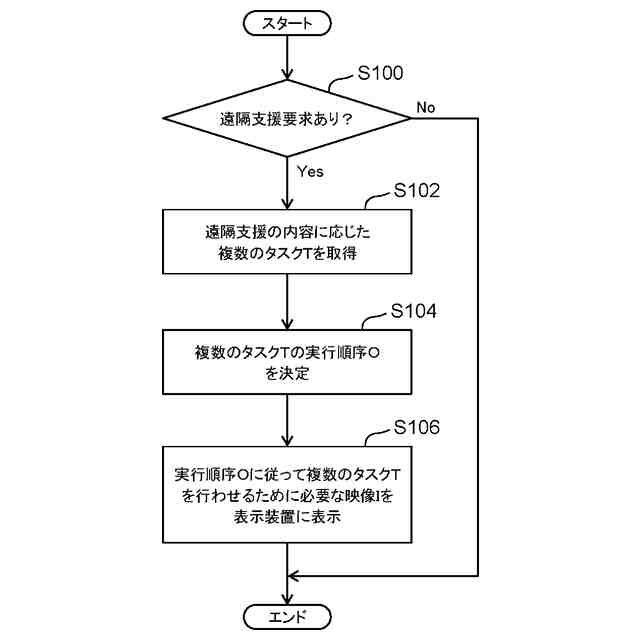
本開示に係る遠隔支援システムは、1又は複数のプロセッサを備える。1又は複数のプロセッサは、自動運転車両から要求される遠隔支援の内容に応じて分割して得られ且つ実行順序が定められた複数のタスクを取得するように構成されている。そして、1又は複数のプロセッサは、上記実行順序に従って複数のタスクを遠隔支援者に行わせるように、遠隔支援者によって操作される遠隔支援端末に複数のタスクの実行に必要な1又は複数の映像を表示する表示処理を実行するように構成されている。
【発明の効果】
【0007】
本開示によれば、遠隔支援者は、遠隔支援をどのような順序で行うべきかを判断しなくてよくなる。このため、遠隔支援者の負荷を軽減することができる。
【図面の簡単な説明】
【0008】
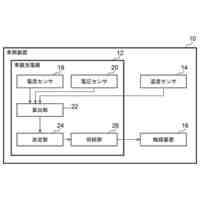
実施の形態に係る遠隔支援システムの概要を説明するための概念図である。
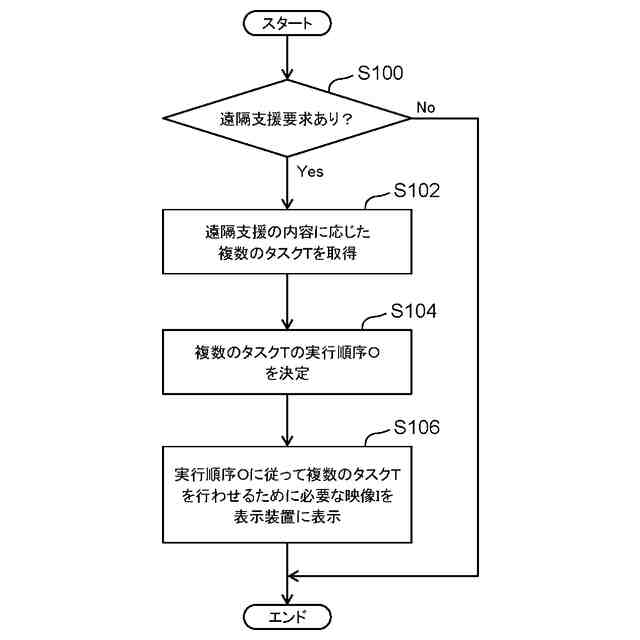
実施の形態に係る遠隔支援に関する処理の流れの一例を示すフローチャートである。
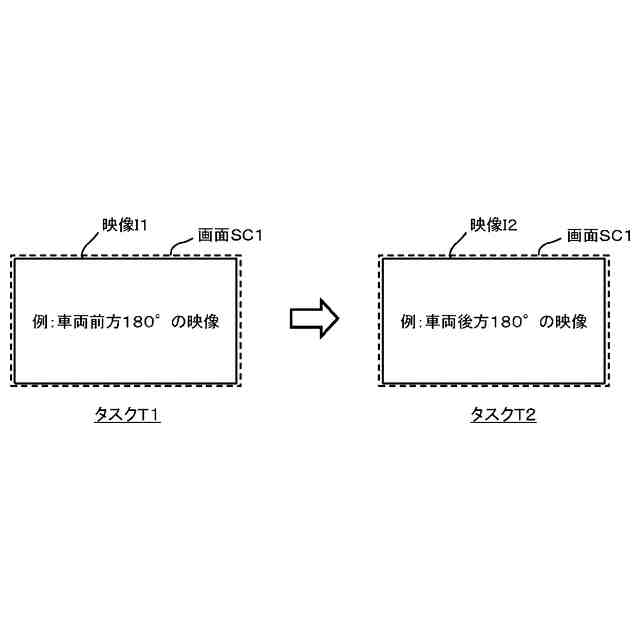
実施の形態に係る表示処理の第1の表示例を説明するための図である。
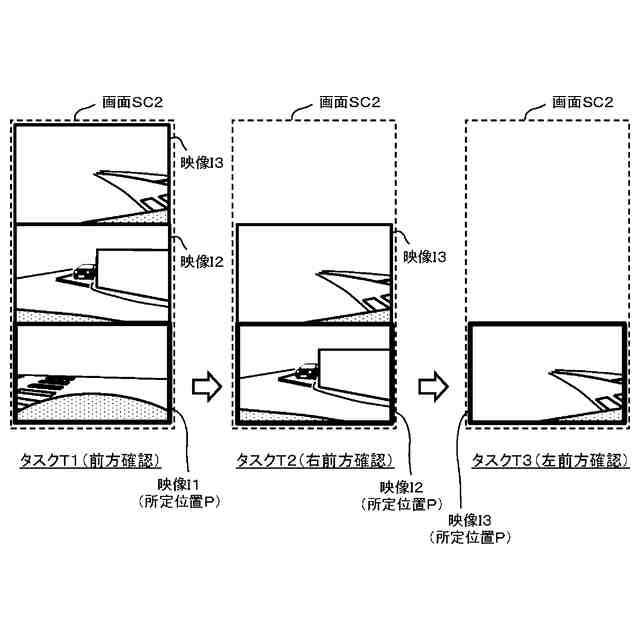
実施の形態に係る表示処理の第2の表示例を説明するための図である。
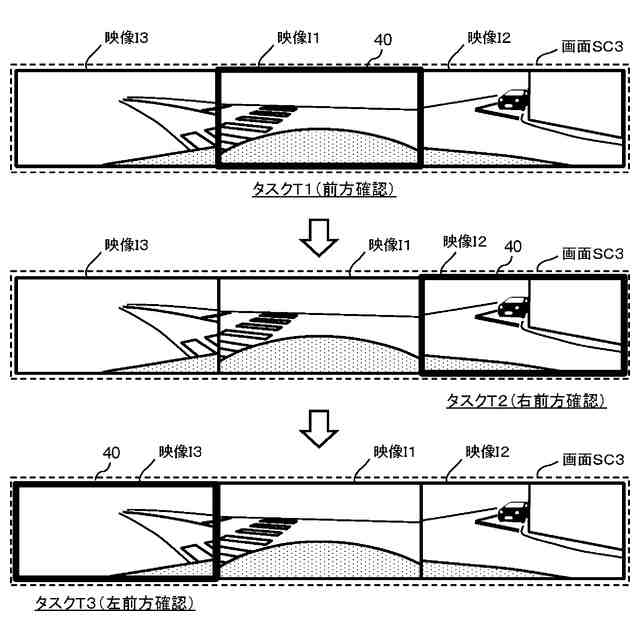
実施の形態に係る表示処理の第3の表示例を説明するための図である。
実施の形態に係る表示処理の第4の表示例を説明するための図である。
実施の形態に係る類似度の第1の利用例に関する処理の流れの一例を示すフローチャートである。
実施の形態に係る類似度の第2の利用例に関する処理の流れの一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
添付図面を参照して、本開示の実施の形態を説明する。
【0010】
1.遠隔支援システムの概要
図1は、実施の形態に係る遠隔支援システム100の概要を説明するための概念図である。遠隔支援システム100は、自動運転車両10に対する遠隔支援のためのシステムである。遠隔支援システム100は、自動運転車両10、遠隔支援端末20、及び管理装置30を含んでいる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車体
29日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
29日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
方法
29日前
トヨタ自動車株式会社
配管
16日前
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
蓄電池
29日前
トヨタ自動車株式会社
ロータ
16日前
トヨタ自動車株式会社
タンク
今日
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
モータ
28日前
トヨタ自動車株式会社
処理装置
7日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
樹脂外板
29日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
塗工装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
車両装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
エンジン
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
電動車両
29日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ