TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025176259
公報種別
公開特許公報(A)
公開日
2025-12-04
出願番号
2024082283
出願日
2024-05-21
発明の名称
ロボット教示装置
出願人
株式会社日立ハイテク
代理人
弁理士法人平木国際特許事務所
主分類
B25J
9/22 20060101AFI20251127BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】教示者が直感的に操作できるエンドエフェクタを有するロボット教示装置であって、エンドエフェクタと作業対象物との相互作用力を正確に計測できるロボット教示装置を提供する。
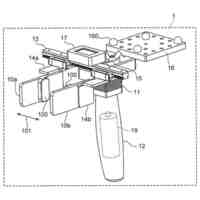
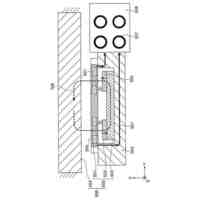
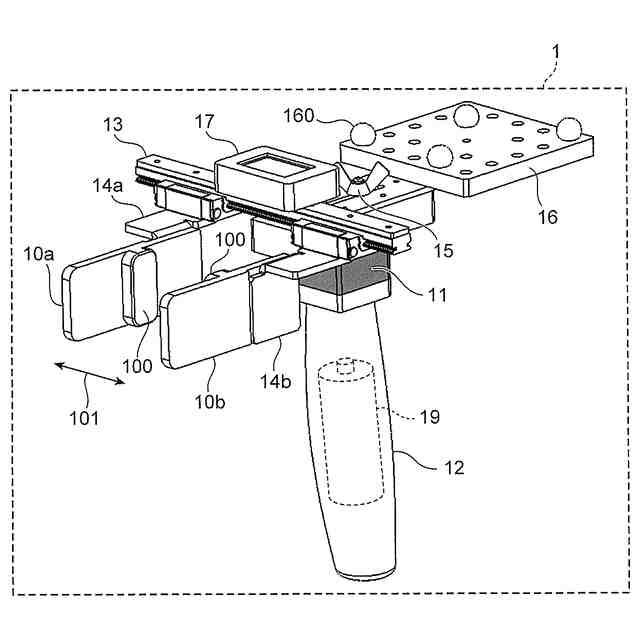
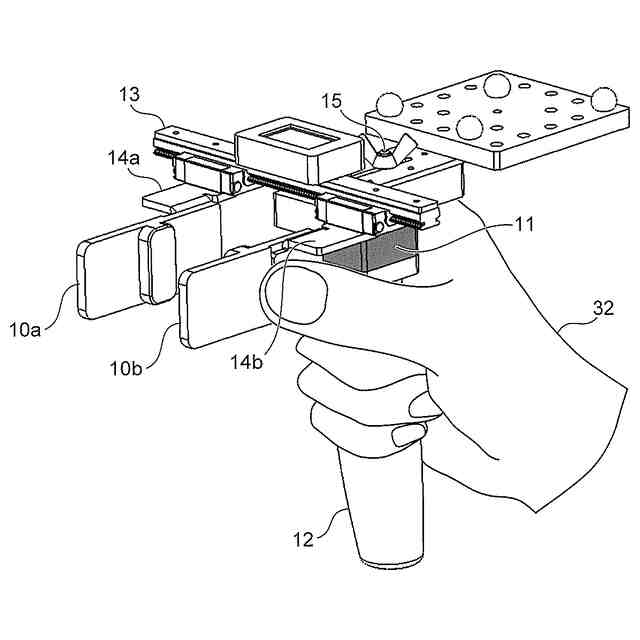
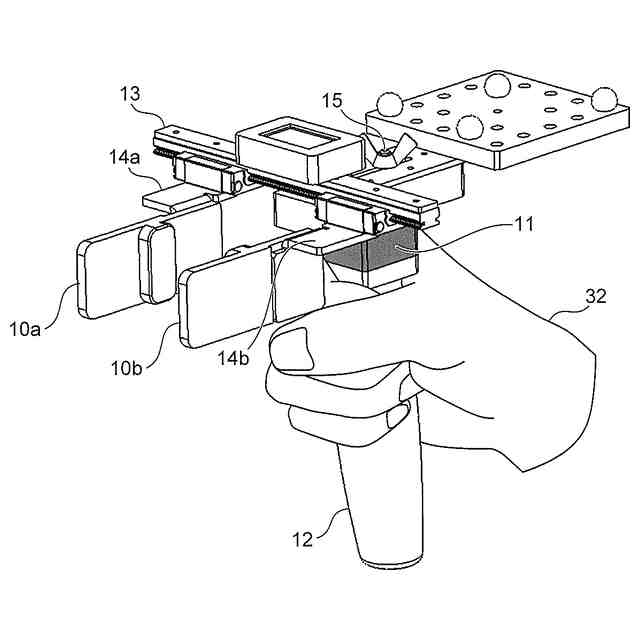
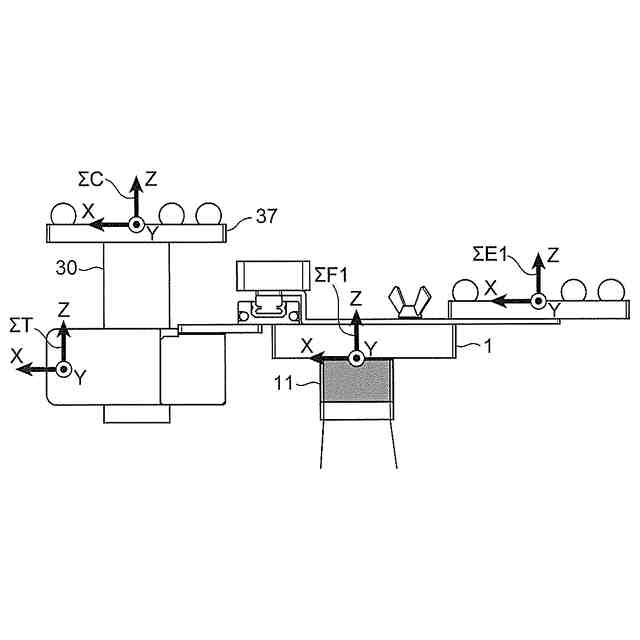
【解決手段】教示者が把持して操作する第1エンドエフェクタ1を備えたロボット教示装置5において、前記第1エンドエフェクタ1は、開閉可能状態と開閉固定状態を切り替え可能な第1爪部10と、ハンドル12と、第1爪部10とハンドル12との間の力・トルクを計測する第1力センサ11と、を備え、前記第1爪部10が開閉固定状態かつ前記ハンドル12が前記教示者により把持された状態の前記第1力センサ11の出力に基づいて、教示データを生成する。
【選択図】図1
特許請求の範囲
【請求項1】
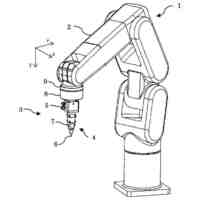
教示者が把持して操作する第1エンドエフェクタと、ロボットに接続される第2エンドエフェクタと、前記第1エンドエフェクタの操作に基づいて前記ロボットの前記第2エンドエフェクタの動作を教示するための教示データを生成する教示データ生成部と、を備えたロボット教示装置において、
前記第1エンドエフェクタは、
前記教示者の操作により開閉可能な開閉可能状態と開閉不能な開閉固定状態を切り替え可能な第1爪部と、
前記教示者が把持可能なハンドルと、
前記第1爪部と前記ハンドルの間に設置され、前記第1爪部と前記ハンドルの間に働く力またはトルクの少なくとも一方を計測可能な第1力センサと、を備え、
前記教示データ生成部は、
前記第1爪部が前記開閉固定状態かつ前記ハンドルが前記教示者により把持された状態の前記第1力センサの出力に基づいて、前記教示データを生成するロボット教示装置。
続きを表示(約 2,400 文字)
【請求項2】
請求項1に記載のロボット教示装置であって、
前記ロボットと前記第2エンドエフェクタの間に設置され、前記ロボットと前記第2エンドエフェクタの間に働く力またはトルクの少なくとも一方を計測可能な第2力センサと、
前記第1エンドエフェクタの位置または姿勢の少なくとも一方を計測する位置姿勢計測部と、
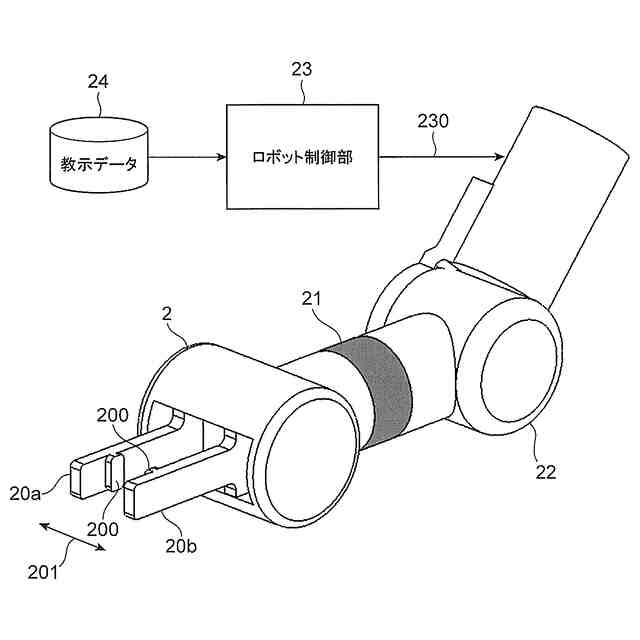
前記位置姿勢計測部の出力と前記第1力センサの出力に基づいて前記教示データ生成部で生成される前記教示データと、前記第2エンドエフェクタの位置または姿勢の少なくとも一方と前記第2力センサの出力に基づいて前記ロボットを制御するロボット制御部と、を備え、
前記第2エンドエフェクタは、
前記ロボットからの動力によって開閉され、前記第1爪部の把持構造と少なくとも部分的に同じ構造である把持構造を持つ第2爪部を有することを特徴とするロボット教示装置。
【請求項3】
請求項2に記載のロボット教示装置であって、
前記位置姿勢計測部によって位置または姿勢の少なくとも一方が計測可能であり、前記第1爪部および前記第2爪部の前記把持構造に対して位置または姿勢の少なくとも一方が一意に定まるように固定される校正治具と、
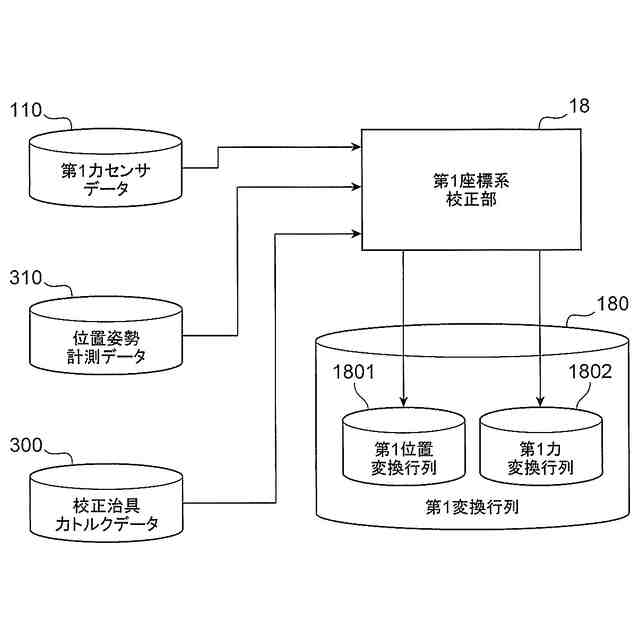
前記第1爪部に固定された前記校正治具の位置または姿勢の少なくとも一方と、前記第1エンドエフェクタの位置または姿勢の少なくとも一方と、前記第1力センサより出力される力またはトルクの少なくとも一方とを同時に計測した結果に基づき、前記第1エンドエフェクタの位置または姿勢の少なくとも一方と、前記第1力センサの力またはトルクの少なくとも一方の計測値を、前記把持構造に関連付けて定義された基準座標系で表現されるデータに変換する第1変換行列を求める第1座標系校正部と、
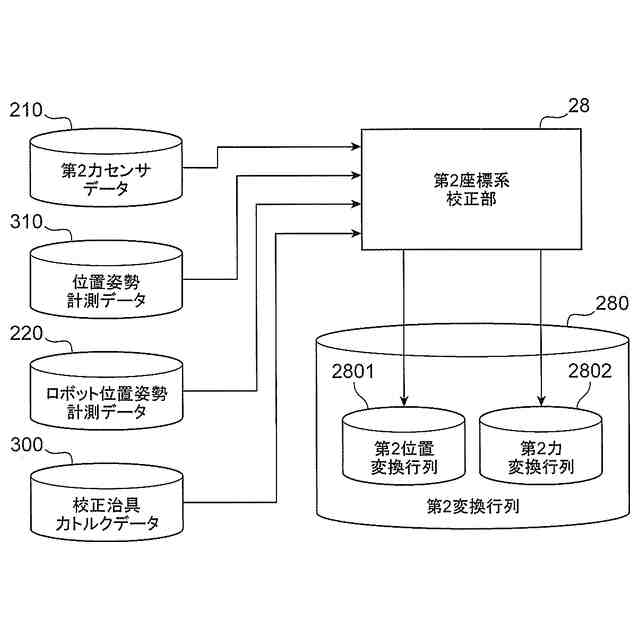
前記第2爪部に固定された前記校正治具の位置または姿勢の少なくとも一方と、前記第2エンドエフェクタの位置または姿勢の少なくとも一方と、前記第2力センサより出力される力またはトルクの少なくとも一方とを同時に計測した結果に基づき、前記第2エンドエフェクタの位置または姿勢の少なくとも一方と、前記第2力センサの力またはトルクの少なくとも一方の計測値を、前記把持構造に関連付けて定義された前記基準座標系で表現されるデータに変換する第2変換行列を求める第2座標系校正部と、を備え、
前記教示データ生成部は、
前記第1変換行列により、前記第1エンドエフェクタの位置または姿勢の少なくとも一方および前記第1力センサの力またはトルクの少なくとも一方の計測値を、前記基準座標系で表現される位置または姿勢の少なくとも一方および力またはトルクの少なくとも一方の教示データに変換し、
前記ロボット制御部は、
前記第2変換行列により、前記第2エンドエフェクタの位置または姿勢の少なくとも一方および前記第2力センサの力またはトルクの少なくとも一方の計測値を、前記基準座標系で表現される位置または姿勢の少なくとも一方および力またはトルクの少なくとも一方のデータに変換し、これらのデータを前記教示データの位置または姿勢の少なくとも一方および/または力またはトルクの少なくとも一方に追従させることを特徴とするロボット教示装置。
【請求項4】
請求項3に記載のロボット教示装置であって、
前記第1変換行列および前記第2変換行列はそれぞれ、
位置または姿勢の少なくとも一方を変換する位置変換行列と、
力またはトルクの少なくとも一方を変換する力変換行列と、を有し、
前記第1座標系校正部および前記第2座標系校正部はそれぞれ、
前記校正治具に加わる力またはトルクの少なくとも一方のデータに基づいて、前記力変換行列を算出することを特徴とするロボット教示装置。
【請求項5】
請求項4に記載のロボット教示装置であって、
前記校正治具の重量と、前記基準座標系から見た前記校正治具の重心の位置に基づいて、前記校正治具に加わる力またはトルクの少なくとも一方を算出することを特徴とするロボット教示装置。
【請求項6】
請求項4に記載のロボット教示装置であって、
前記校正治具は、前記校正治具に加わる力またはトルクの少なくとも一方を計測する第3力センサを備えることを特徴とするロボット教示装置。
【請求項7】
請求項3に記載のロボット教示装置であって、
前記基準座標系を設定する基準座標系設定部と、
前記教示データの位置または姿勢の少なくとも一方と前記基準座標系で表現される前記第2エンドエフェクタの位置または姿勢の少なくとも一方との差分に対して、目標インピーダンス特性を設定するインピーダンス特性設定部と、を備えることを特徴とするロボット教示装置。
【請求項8】
請求項1に記載のロボット教示装置であって、
前記第1エンドエフェクタは、
前記第1力センサの計測値を取得し、無線通信によって外部機器に前記計測値を送信する情報処理部と、
前記第1力センサおよび前記情報処理部に電力を供給するバッテリと、を備えることを特徴とするロボット教示装置。
【請求項9】
請求項1に記載のロボット教示装置であって、
前記第1エンドエフェクタは、
前記第1爪部の開閉を行う開閉機構と、
前記第1爪部の前記開閉機構の開閉操作を行う開閉操作部と、
前記第1爪部の前記開閉機構の開閉状態を固定する開閉固定機構と、を備え、
前記開閉固定機構によって、前記第1爪部の前記開閉可能状態と前記開閉固定状態を切り替えることを特徴とするロボット教示装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに所定の作業を教示するためのロボット教示装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
ロボットに所定の作業を教示するロボット教示装置として、教示者が教示デバイスを用いて実演した作業を、ロボットに再現させるようなシステムが知られている。これらは、教示デバイスの位置・姿勢情報や、力・トルク情報をセンサで取得し、ロボットへの動作指令の計算に用いている。
【0003】
特許文献1では、教示者が手持して操作対象を把持する複数の指を開閉可能なハンド機構が開示されている。このハンド機構は、触覚センサを有し、操作対象の把持力を計測可能である。
【0004】
特許文献2では、作業者が力覚センサを搭載した教示装置を用いて所定の作業を実施した際のデータを用いてロボットを制御する。
【先行技術文献】
【特許文献】
【0005】
特開2022-66085号公報
特開平9-47989号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1で開示される技術では、教示者が直感的な操作でロボット教示ができるものの、作業対象物との相互作用力を測定するためのセンサが搭載されていないため、例えばバリ取り作業のようなロボットと作業対象物の間の力加減が必要な作業の教示ができない、という課題があった。
【0007】
また、特許文献2で開示される技術では、作業対象物との相互作用力を測定することができるものの、ロボットが扱う作業工具などを模擬した教示装置を、作業内容に応じて開発する必要があるため、エンジニアリングコストが増大する、という課題があった。
【0008】
特許文献1で開示されるような教示デバイスに、作業対象物との相互作用力を測定する力センサを搭載する構成も考えられるものの、教示者が教示デバイスを支持する箇所および力センサの取り付け位置によっては正しく作業対象物との相互作用力を計測できない、という課題があった。
【0009】
本発明では、上記のような課題に鑑み、教示者が直感的に操作できる操作デバイスを有し、操作デバイスと作業対象物との相互作用力を正確に計測できるロボット教示装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明におけるロボット教示装置は、教示者が把持して操作する第1エンドエフェクタと、ロボットに接続される第2エンドエフェクタと、前記第1エンドエフェクタの操作に基づいて前記ロボットの前記第2エンドエフェクタの動作を教示するための教示データを生成する教示データ生成部と、を備えたロボット教示装置において、前記第1エンドエフェクタは、前記教示者の操作により開閉可能な開閉可能状態と開閉不能な開閉固定状態を切り替え可能な第1爪部と、前記教示者が把持可能なハンドルと、前記第1爪部と前記ハンドルの間に設置され、前記第1爪部と前記ハンドルの間に働く力・トルクを計測可能な第1力センサと、を備え、前記教示データ生成部は、前記第1爪部が前記開閉固定状態かつ前記ハンドルが前記教示者により把持された状態の前記第1力センサの出力に基づいて、前記教示データを生成する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立ハイテク
ガスセンサ
24日前
株式会社日立ハイテク
分散制御システム
2日前
株式会社日立ハイテク
ロボット教示装置
2日前
株式会社日立ハイテク
セキュリティ分析装置および方法
10日前
株式会社日立ハイテク
セキュリティ対策管理装置および方法
16日前
株式会社日立ハイテク
ステージ装置、それを備えた荷電粒子線装置
3日前
株式会社日立ハイテク
ステージ装置、荷電粒子線装置および真空装置
2日前
株式会社日立ハイテク
自動培養装置、それを複数用いた自動培養システム
16日前
株式会社日立ハイテク
分析装置
18日前
株式会社日立ハイテク
フリッカ値算出及び電源高調波解析装置、分析装置、フリッカ値算出及び電源高調波解析方法
1か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
川崎重工業株式会社
ロボット
2か月前
CKD株式会社
把持装置
1日前
株式会社竹中工務店
補助セット
2か月前
株式会社不二越
ロボット
2か月前
トヨタ自動車株式会社
学習装置
16日前
川崎重工業株式会社
ハンド
1か月前
ダイセイ株式会社
ロボット自動刻印装置
1日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
瓜生製作株式会社
電動締付工具
9日前
トヨタ自動車株式会社
ロボット
2か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
2か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
1か月前
トヨタ自動車株式会社
軌道生成装置
2か月前
株式会社不二越
垂直多関節ロボット
16日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社マキタ
集塵アタッチメント
8日前
トヨタ自動車株式会社
ロボットハンド
1か月前
シンフォニアテクノロジー株式会社
搬送装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
アネックスツール株式会社
ドライバービット
2か月前
株式会社マキタ
現場用作業機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ