TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025175718
公報種別
公開特許公報(A)
公開日
2025-12-03
出願番号
2024081939
出願日
2024-05-20
発明の名称
学習装置、学習方法及び学習プログラム
出願人
住友電気工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G06T
7/00 20170101AFI20251126BHJP(計算;計数)
要約
【課題】学習済みモデルの精度の向上が図れる学習装置、学習方法及び学習プログラムを提供する。
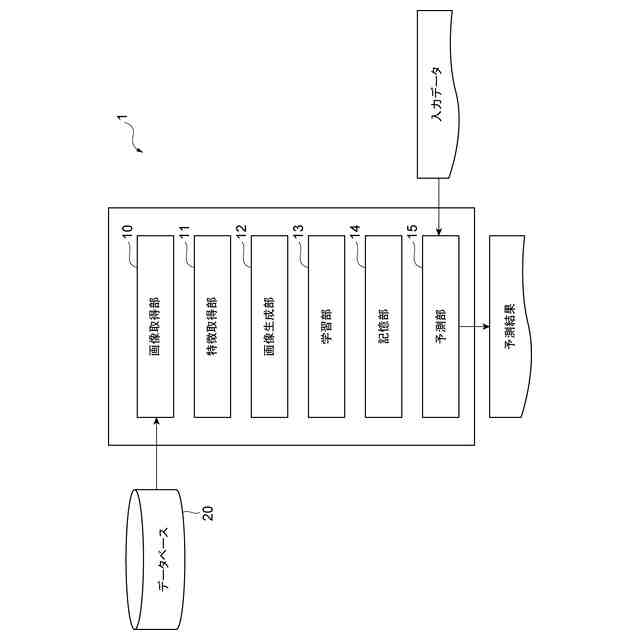
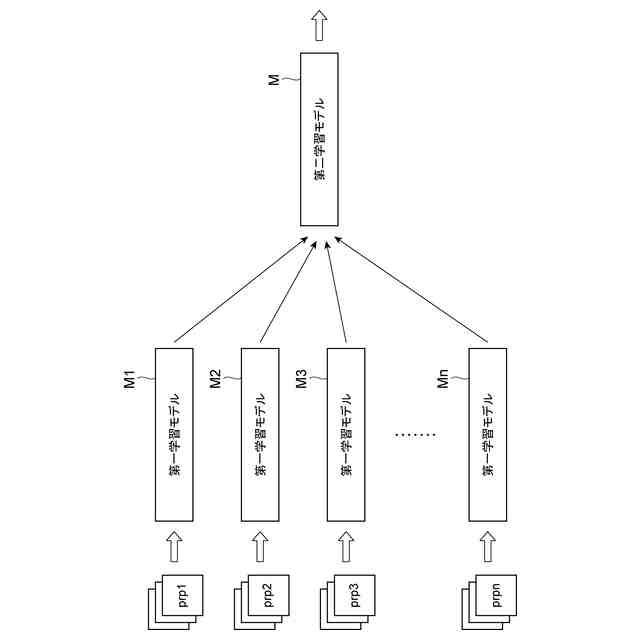
【解決手段】学習装置は、画像を取得する画像取得部と、画像取得部によって取得された画像の特徴をカテゴリ毎に取得する特徴取得部と、画像を用いて学習モデルの機械学習を行う学習部と、を備え、学習部は、複数のカテゴリのそれぞれに対応する複数の第一学習モデルを有し、カテゴリに属する特徴を有する画像を用いて当該カテゴリに対応する第一学習モデルの機械学習を個別に行い、複数の第一学習モデルのパラメータを組み合わせて第二学習済みモデルを生成する。
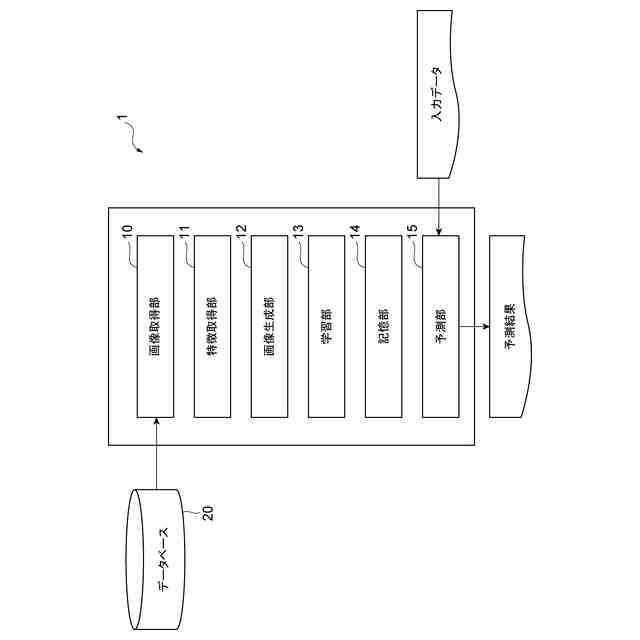
【選択図】図2
特許請求の範囲
【請求項1】
画像を取得する画像取得部と、
前記画像取得部によって取得された前記画像の特徴をカテゴリ毎に取得する特徴取得部と、
前記画像を用いて学習モデルの機械学習を行う学習部と、を備え、
前記学習部は、
複数の前記カテゴリのそれぞれに対応する複数の第一学習モデルを有し、
前記カテゴリに属する前記特徴を有する前記画像を用いて当該カテゴリに対応する前記第一学習モデルの機械学習を個別に行い、
複数の前記第一学習モデルのパラメータを組み合わせて第二学習済みモデルを生成する、学習装置。
続きを表示(約 660 文字)
【請求項2】
前記特徴取得部は、規定のプロンプトに基づいて、前記カテゴリに対応する前記特徴を取得する、請求項1に記載の学習装置。
【請求項3】
画像を取得する画像取得ステップと、
前記画像取得ステップにおいて取得された前記画像の特徴をカテゴリ毎に取得する特徴取得ステップと、
前記画像を用いて学習モデルの機械学習を行う学習ステップと、を含み、
前記学習ステップでは、
複数の前記カテゴリのそれぞれに対応する複数の第一学習モデルを有し、
前記カテゴリに属する前記特徴を有する前記画像を用いて当該カテゴリに対応する前記第一学習モデルの機械学習を個別に行い、
複数の前記第一学習モデルのパラメータを組み合わせて第二学習済みモデルを生成する、学習方法。
【請求項4】
画像を取得する画像取得ステップと、
前記画像取得ステップにおいて取得された前記画像の特徴をカテゴリ毎に取得する特徴取得ステップと、
前記画像を用いて学習モデルの機械学習を行う学習ステップと、をコンピュータに実行させ、
前記学習ステップでは、
複数の前記カテゴリのそれぞれに対応する複数の第一学習モデルを有し、
前記カテゴリに属する前記特徴を有する前記画像を用いて当該カテゴリに対応する前記第一学習モデルの機械学習を個別に行い、
複数の前記第一学習モデルのパラメータを組み合わせて第二学習済みモデルを生成する、学習プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、学習装置、学習方法及び学習プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、不良部画像の画像データである不良部データを記憶する不良部データ記憶部と、良品画像の画像データである良品データを記憶する良品データ記憶部と、不良部データ、良品データ、及び生成パラメータに基づいて、良品画像に不良部画像を合成した学習画像の画像データである学習データを生成する学習データ生成部と、学習データを記憶する学習データ記憶部と、生成パラメータを設定する生成パラメータ設定部と、を備える学習データ生成装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-27424号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
物品の検査方法として、機械学習によって生成された学習済みモデルに物品を含む画像を入力して、学習済みモデルから出力される予測結果に応じて物品を検査する方法がある。予測精度を向上させるためには、多くの教師データを用いて学習済みモデルを生成することが好ましい。しかしながら、実際の検査工程においては、不良品の発生は多くないため、不良品に関する不良画像(実画像)を多く得ることは困難である。そのため、多くの不良画像を得るために時間を要するため、学習済みモデルの生成に時間を要する。そこで、上記のように、不良画像の疑似画像を生成し、疑似画像を教師データとして用いて学習モデルの機械学習を行っている。
【0005】
学習済みモデルの精度の向上を図るためには、学習済みモデルにおいて性能の低いプロパティ(苦手(弱点)とする特徴)を有する画像を用いて学習モデルの機械学習する必要がある。そのため、学習装置では、性能の低いプロパティ(不良部分の大きさ、位置等)に関する疑似画像を生成し、この疑似画像を教師データとして用いて学習モデルの機械学習を繰り返し行う。しかしながら、性能の低いプロパティを有する疑似画像ばかりを用いて学習を繰り返すと、性能の低いプロパティに関しての精度は向上するものの、元々性能の高かったプロパティの精度が相対的に低下し得る。その結果、学習済みモデルの精度の低下を招来し得る。
【0006】
本開示は、学習済みモデルの精度の向上が図れる学習装置、学習方法及び学習プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一側面に係る学習装置は、画像を取得する画像取得部と、画像取得部によって取得された画像の特徴をカテゴリ毎に取得する特徴取得部と、画像を用いて学習モデルの機械学習を行う学習部と、を備え、学習部は、複数のカテゴリのそれぞれに対応する複数の第一学習モデルを有し、カテゴリに属する特徴を有する画像を用いて当該カテゴリに対応する第一学習モデルの機械学習を個別に行い、複数の第一学習モデルのパラメータを組み合わせて第二学習済みモデルを生成する。
【発明の効果】
【0008】
本開示によれば、学習済みモデルの精度の向上が図れる。
【図面の簡単な説明】
【0009】
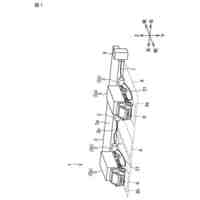
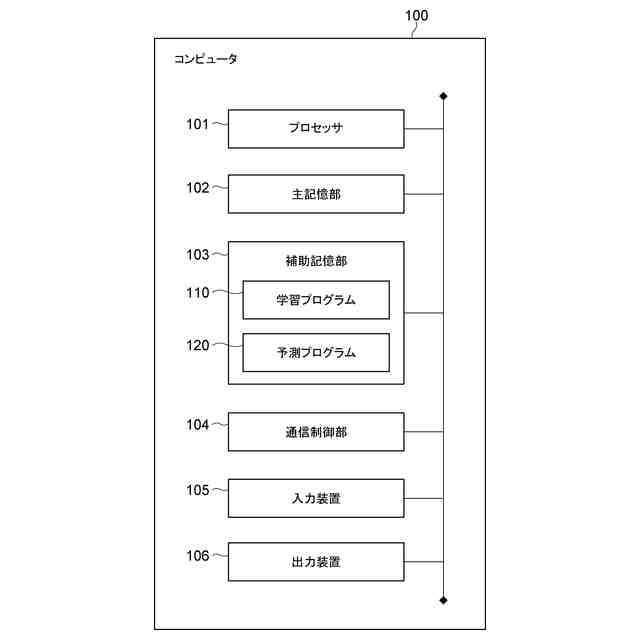
図1は、一実施形態に係る予測システムで用いられるコンピュータのハードウェア構成の一例を示す図である。
図2は、予測システムの機能構成の一例を示す図である。
図3は、学習部における学習方法を概略的に示す図である。
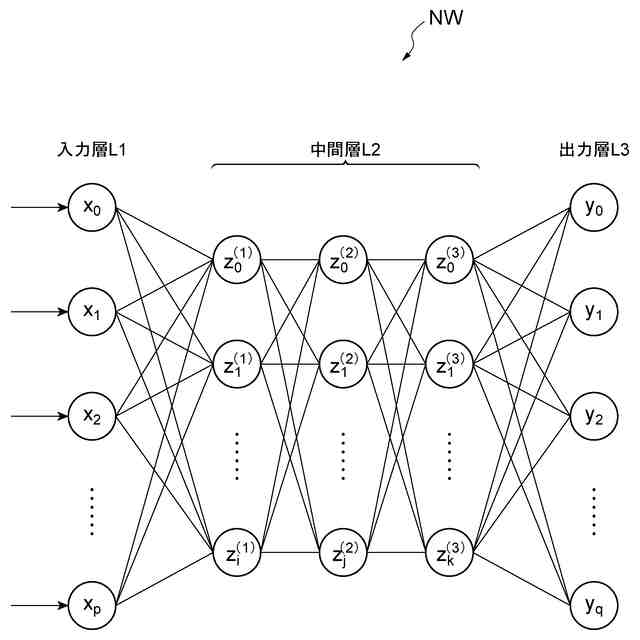
図4は、ニューラルネットワークの一例を示す図である。
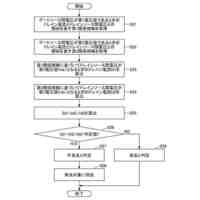
図5は、学習方法、及び、学習済みモデルの生成の一例を処理フローとして示すフローチャートである。
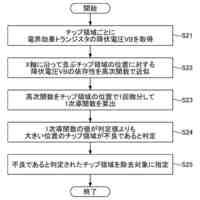
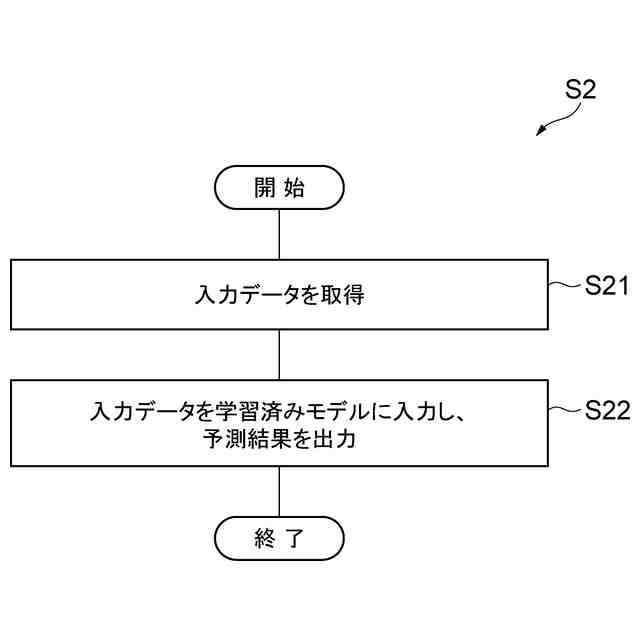
図6は、予測方法の一例を処理フローとして示すフローチャートである。
【発明を実施するための形態】
【0010】
[本開示の実施形態の説明]
最初に、本開示の実施形態の内容を列記して説明する。以下に記載する実施形態の少なくとも一部を任意に組み合わせてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
住友電気工業株式会社
受光素子
27日前
住友電気工業株式会社
ペレット
1か月前
住友電気工業株式会社
ペレット
1か月前
住友電気工業株式会社
半導体装置
今日
住友電気工業株式会社
歪補償装置
1日前
住友電気工業株式会社
光検出装置
29日前
住友電気工業株式会社
充電システム
1か月前
住友電気工業株式会社
高周波用電線
1か月前
住友電気工業株式会社
半導体受光素子
1か月前
住友電気工業株式会社
電線物理量測定装置
1か月前
住友電気工業株式会社
炭化珪素半導体装置
6日前
住友電気工業株式会社
光コネクタケーブル
1か月前
住友電気工業株式会社
炭化珪素半導体装置
1か月前
住友電気工業株式会社
炭化珪素半導体装置
1か月前
住友電気工業株式会社
炭化珪素半導体装置
1か月前
住友電気工業株式会社
炭化珪素半導体装置
1か月前
住友電気工業株式会社
光分岐ケーブルセット
1日前
住友電気工業株式会社
光コネクタおよび接続構造
6日前
住友電気工業株式会社
集電体及びニッケル亜鉛電池
1か月前
住友電気工業株式会社
受光素子およびその製造方法
1か月前
住友電気工業株式会社
窒化物半導体装置の製造方法
14日前
住友電気工業株式会社
窒化物半導体基板の製造方法
1日前
住友電気工業株式会社
コンタクタ治具および検査治具
1か月前
住友電気工業株式会社
アバランシェフォトダイオード
22日前
住友電気工業株式会社
方法、超電導線材、および制御システム
1か月前
住友電気工業株式会社
学習装置、学習方法及び学習プログラム
1日前
住友電気工業株式会社
タンク、およびレドックスフロー電池システム
7日前
住友電気工業株式会社
半導体光素子、および半導体光素子の製造方法
1か月前
住友電気工業株式会社
半導体装置の製造方法および半導体装置の検査方法
6日前
住友電気工業株式会社
半導体装置の製造方法および半導体装置の検査方法
6日前
住友電気工業株式会社
半導体装置の製造方法および半導体装置の検査方法
6日前
住友電気工業株式会社
窒化物半導体装置および窒化物半導体装置の製造方法
6日前
住友電気工業株式会社
画像処理装置、画像処理方法及び画像処理プログラム
28日前
住友電気工業株式会社
画像処理装置、画像処理方法及び画像処理プログラム
14日前
住友電工プリントサーキット株式会社
プリント配線板
1か月前
住友電気工業株式会社
電力変換システム、制御方法、コンピュータプログラム
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ