TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025174875
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2025069787
出願日
2025-04-21
発明の名称
車両制御方法、車両制御システム
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
B60W
30/09 20120101AFI20251120BHJP(車両一般)
要約
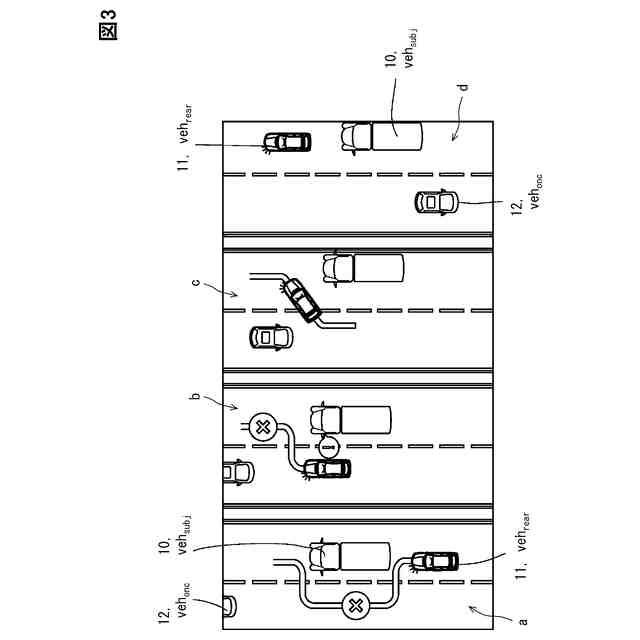
【課題】後方車両による追い越しに対して対象車両の安全性を向上させるための対象車両の制御方法及び車両制御システムを提供する。
【解決手段】対象車両の制御方法は、対向車両が接近している状況での対向車線を用いた後方車両による追い越しに係る制御方法である。当該制御方法は、対象車両、対向車両、及び後方車両のそれぞれの走行状況を特定するステップと、特定された対象車両、対向車両、及び後方車両の現在の走行状況が後方車両による対象車両の追い越しを許さない状況である場合に、対象車両の走行速度を低下させるか、及び/又は、後方車両による対象車両の追い越しを可能にするために対象車両の走行方向を変更するように対象車両10を制御するステップと、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
後方車両による追い越しに対する対象車両の制御方法であって、
対象車両(10)、対向車両(12)、及び後方車両(11)の走行状況を特定するステップと、
特定された前記対象車両、前記対向車両、及び前記後方車両のそれぞれの現在の走行状況が前記後方車両による前記対象車両の追い越しを許さない状況である場合、前記後方車両による追い越しを可能にするために、前記対象車両の走行速度を低下させることと、前記対象車両の走行方向を変更することの少なくともいずれか一方を含む前記対象車両の制御を実施するステップと、を含む車両制御方法。
続きを表示(約 2,300 文字)
【請求項2】
前記対象車両の走行状況を特定することは、前記対象車両の走行速度(Vsbj)及び走行中の車線内における前記対象車両の横位置の少なくともいずれか一方を特定することを含む、請求項1に記載の車両制御方法。
【請求項3】
前記対象車両(10)、前記対向車両、及び前記後方車両のそれぞれの走行状況を特定するステップは、
前記後方車両の走行速度(V1)、前記後方車両と対象車両との距離(D1)、前記対向車両の走行速度(V2)、前記対向車両と前記対象車両との距離(D2)を特定することと、
前記後方車両の速度(V1)、前記後方車両と前記対象車両との距離(D1)、前記対向車両の速度(V2)、前記対向車両と前記対象車両との距離(D2)に基づいて、前記対向車両と前記後方車両との衝突までの時間である第1の衝突余裕時間(TTC1)を特定することと、前記第1の衝突余裕時間(TTC1)、前記後方車両の速度(V1)、及び前記対向車両の速度(V2)に基づいて、前記対向車両と前記後方車両との衝突ポイントまでの前記対象車両の走行距離(D)を特定することと、
前記対象車両の走行距離(D)及び前記対象車両の速度(Vsbj)に基づいて、前記対向車両と前記後方車両との衝突ポイントに前記対象車両が至るまでの時間である第2の衝突余裕時間(TTC2)を特定することと、を含む請求項1又は2に記載の車両制御方法。
【請求項4】
特定された前記対象車両、前記対向車両、及び前記後方車両のそれぞれの走行状況に基づいて前記対象車両を制御するステップは、
前記後方車両と前記対象車両との距離(D1)が0以下であり、かつ、前記第2の衝突余裕時間(TTC2)が第1閾値(α)より小さい場合には、前記対象車両の速度を低下させることであり、
前記後方車両と前記対象車両との距離(D1)が0以下であり、前記第2の衝突余裕時間(TTC2)が第2閾値(β)よりも小さく、且つ対向車線とは反対側の車線端と前記対象車両との距離(W)が少なくとも第3閾値(γ)以上である場合には、前記対象車両の速度を低下させるとともに前記対象車両を前記車線端に向けて横移動させることである、請求項3に記載の車両制御方法。
【請求項5】
特定された前記対象車両、前記対向車両、及び前記後方車両のそれぞれの走行状況に基づいて前記対象車両を制御するステップは、前記対象車両の長さ(L)に基づいて実施される、請求項3に記載の車両制御方法。
【請求項6】
車線を走行している対象車両のための車両制御システムであって、
前記対象車両と後方車両との間の距離(D1)、及び前記後方車両の速度(V1)を検知するように構成されている後方検知手段と、
前記対象車両と対向車両との距離(D2)、及び前記対向車両の速度(V2)を検知するように構成されている前方検知手段と、
前記車線における前記対象車両の横位置を検出するように構成されている車線検知手段と、
前記対象車両と前記後方車両との衝突を回避しつつ、前記後方車両による前記対象車両の追い越しを可能にするために、前記対象車両の速度を低下させることと、前記対象車両を対向車線とは反対側の車線端に向けて操舵することの少なくとも一方のための出力信号を生成するために、前記後方検知手段により検知された距離及び速度、前記前方検知手段により検知された距離及び速度、並びに前記車線検知手段により検知された横位置のデータを処理するように構成されている処理手段と、を備える車両制御システム。
【請求項7】
前記処理手段は、
前記後方車両の速度(V1)、前記対象車両と前記後方車両との間の距離(D1)、前記対向車両の速度(V2)、及び前記対象車両と前記対向車両との距離(D2)に基づいて、前記対向車両と前記後方車両との衝突までの時間である第1の衝突余裕時間(TTC1)を特定することと、
前記第1の衝突余裕時間(TTC1)、前記後方車両の速度(V1)、及び前記対向車両の速度(V2)に基づいて、前記対向車両と前記後方車両との衝突ポイントまでの前記対象車両の走行距離(D)を特定することと、
前記対象車両の走行距離(D)及び前記対象車両の速度(Vsbj)に基づいて、前記対向車両と前記後方車両との衝突ポイントに前記対象車両が至るまでの時間である第2の衝突余裕時間(TTC2)を特定することと、を実行するように構成されている請求項6に記載の車両制御システム。
【請求項8】
前記処理手段は、
前記後方車両と前記対象車両との距離(D1)が0以下であり、かつ、前記第2の衝突余裕時間(TTC2)が第1閾値(α)より小さい場合に、対象車両の速度を低下させるための出力信号を生成することと、
前記後方車両と前記対象車両との距離(D1)が0以下であり、前記第2の衝突余裕時間(TTC2)が第2閾値(β)よりも小さく、且つ、対向車線とは反対側の車線端と前記対象車両との距離(W)が少なくとも第3閾値(γ)以上である場合に、前記対象車両の速度を低下させるとともに対象車両が前記車線端に向けて横移動させるための出力信号を生成することの、少なくともいずれか一方を実施するように構成されている請求項7に記載の車両制御システム。
【請求項9】
前記処理手段は、前記対象車両の長さ(L)を考慮して前記対象車両を制御するように構成されている請求項6から8のいずれか1項に記載の車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、後方車両による追い越しに対する対象車両の制御方法、及び、車両制御システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、交通渋滞中(例えば車両速度が30km/h以下である状態)において、短距離で対象車両の前に割り込む他車両を認識する技術に関する装置及び方法が開示されている。
【0003】
特許文献2は、周囲又は近くの車両の操縦が割り込みに該当するかを特定する装置及び方法に関するものであって、周囲又は近くの車両の操縦を正確に特定することを目的としている。当該文献によれば、前方レーダ装置により検出された第1周辺車両情報と、コーナーレーダにより検出された第2周辺車両情報とを融合し、周辺車両の運動を特定する。
【0004】
特許文献3では、カメラデータ、レーダデータ、及びセンサデータを参照することにより、対象車両の前方にある後方車両の動きを推定する方法及び装置が開示されている。
【0005】
特許文献4は、センサを用いて検出される周囲の車両に関する情報に基づいて、その動きを計算し、旋回運動による周囲の車両の割り込み意図を判断するコーナーレーダを開示している。
【先行技術文献】
【特許文献】
【0006】
独国特許出願公開第102020209498号明細書
米国特許出願公開第2019/0184987号明細書
独国特許出願公開第102018217045号明細書
韓国登録特許第10-2383433号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
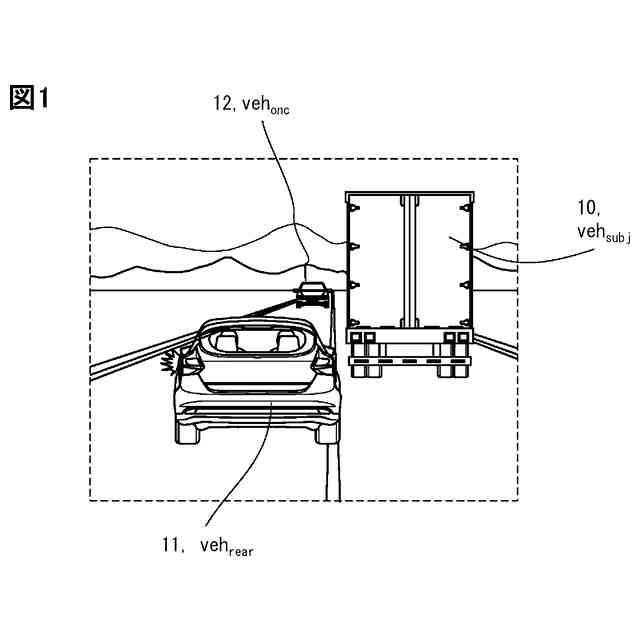
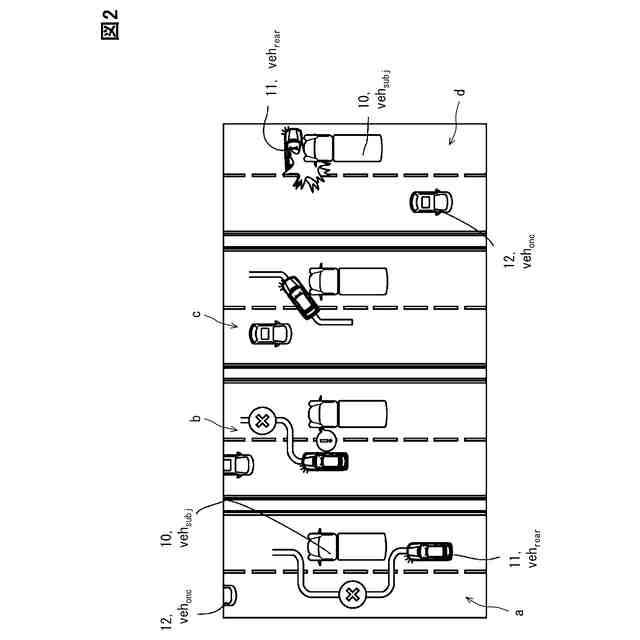
後方車両が対向車線を用いて自車両としての対象車両を追い越そうとしている状況において対向車両が存在する場合、後方車両が対向車両との衝突を避けるために、対象車両側に操舵し、対象車両と後方車両とが接触することが懸念される。
【0008】
本開示の目的の1つは、後方車両による追い越しに対して対象車両の安全性を向上させるための車両制御方法及び車両制御システムを提供することにある。上記目的は、いくつかの態様によって解決される。
【課題を解決するための手段】
【0009】
本開示の車両制御方法は、後方車両による追い越しに対する対象車両の制御方法であって、対象車両(10)、対向車両(12)、及び後方車両(11)の走行状況を特定するステップと、特定された対象車両、対向車両、及び後方車両のそれぞれの現在の走行状況が後方車両による対象車両の追い越しを許さない状況である場合、後方車両による追い越しを可能にするために、対象車両の走行速度を低下させることと、対象車両の走行方向を変更することの少なくともいずれか一方を含む対象車両の制御を実施するステップと、を含む。
【0010】
また本開示の車両制御システムは、車線を走行している対象車両のための車両制御システムであって、対象車両と後方車両との間の距離(D1)、及び後方車両の速度(V1)を検知するように構成されている後方検知手段と、対象車両と対向車両との距離(D2)、及び対向車両の速度(V2)を検知するように構成されている前方検知手段と、車線における対象車両の横位置を検出するように構成されている車線検知手段と、対象車両と後方車両との衝突を回避しつつ、後方車両による対象車両の追い越しを可能にするために、対象車両の速度を低下させることと、対象車両を対向車線とは反対側の車線端に向けて操舵することの少なくとも一方のための出力信号を生成するために、後方検知手段により検知された距離及び速度、前方検知手段により検知された距離及び速度、並びに車線検知手段により検知された横位置のデータを処理するように構成されている処理手段と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
1か月前
株式会社デンソー
分離体
11日前
株式会社デンソー
回転機
1か月前
株式会社デンソー
電動機
3日前
株式会社デンソー
端子台
5日前
株式会社デンソー
電動弁
25日前
株式会社デンソー
撮像装置
24日前
株式会社デンソー
トランス
3日前
株式会社デンソー
制御装置
27日前
株式会社デンソー
電解装置
26日前
株式会社デンソー
撮像装置
24日前
株式会社デンソー
検出装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電子装置
25日前
株式会社デンソー
光学部材
11日前
株式会社デンソー
光学部材
3日前
株式会社デンソー
熱交換器
24日前
株式会社デンソー
摺動機構
24日前
株式会社デンソー
摺動機構
24日前
株式会社デンソー
電子装置
3日前
株式会社デンソー
電気回路
19日前
株式会社デンソー
光学部材
11日前
株式会社デンソートリム
鞍乗り車両
1か月前
株式会社デンソー
熱交換部材
26日前
株式会社デンソー
ヒータ装置
1か月前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
半導体装置
26日前
株式会社デンソー
半導体装置
24日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
電流センサ
1か月前
株式会社デンソー
電磁継電器
3日前
株式会社デンソー
熱交換装置
1か月前
株式会社デンソー
給電システム
11日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ