TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173749
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024079472
出願日
2024-05-15
発明の名称
レーダ取付角度推定装置および物標検出装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G01S
7/40 20060101AFI20251120BHJP(測定;試験)
要約
【課題】レーダの垂直取付角度を精度良く推定する。
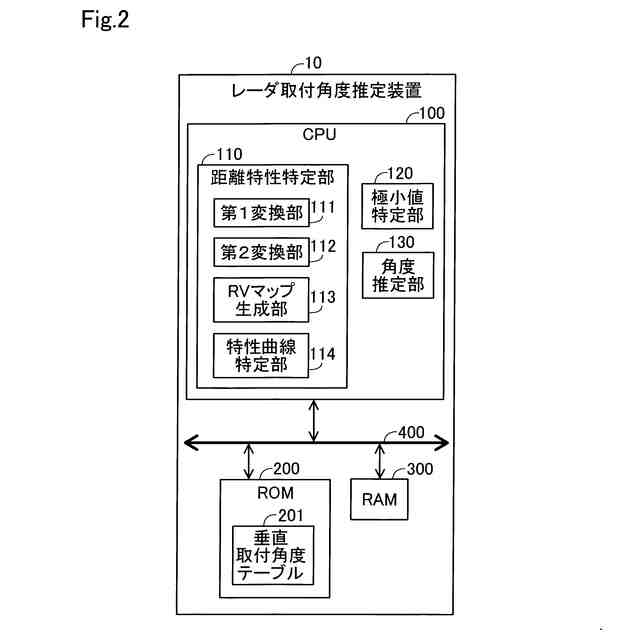
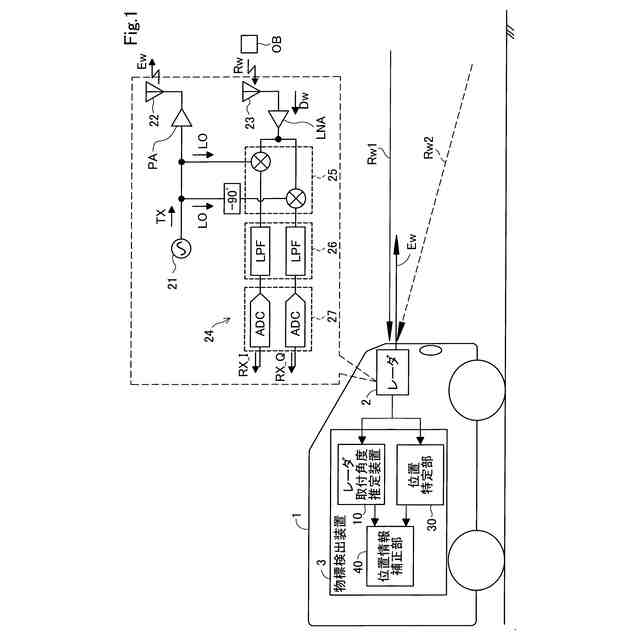
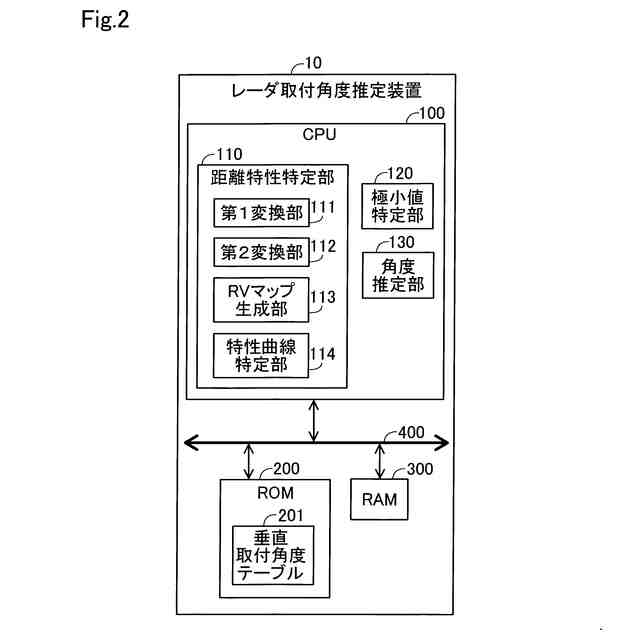
【解決手段】移動体1に取り付けられているレーダ2の垂直取付角度を推定するレーダ取付角度推定装置10は、レーダからの放射波Ewの反射波Rwが受信される際の受信強度を利用して、反射波の発生元である反射点までの距離に応じた受信強度の特性である距離特性を特定する距離特性特定部110と、距離特性を示す特性曲線における極小点であって、反射波を構成する直接反射波Rw1と路面を経由する間接反射波Rw2との強め合い弱め合いにおける弱め合いにより生じる受信強度の極小値を有する極小点を特定する極小点特定部120と、特定された極小点における距離を利用して、垂直取付角度を推定する角度推定部130と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
移動体(1)に取り付けられているレーダ(2)の垂直取付角度を推定するレーダ取付角度推定装置(10)であって、
前記レーダからからの放射波(Ew)の反射波(Rw)が受信される際の受信強度を利用して、前記反射波の発生元である反射点までの距離に応じた前記受信強度の特性である距離特性を特定する距離特性特定部(110)と、
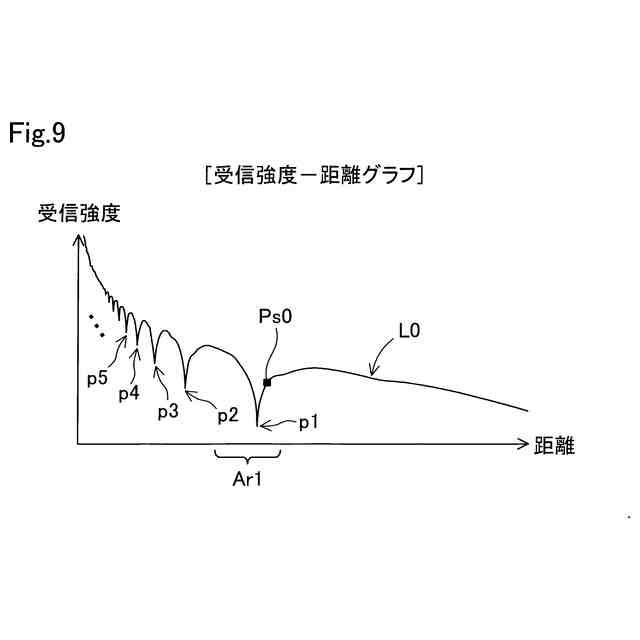
前記距離特性を示す特性曲線における極小点であって、前記反射波を構成する直接反射波(Rw1)と路面を経由する間接反射波(Rw2)との強め合い弱め合いにおける弱め合いにより生じる前記受信強度の極小値を有する極小点を特定する極小点特定部(120)と、
特定された前記極小点における前記距離を利用して、前記垂直取付角度を推定する角度推定部(130)と、
を備える、レーダ取付角度推定装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載のレーダ取付角度推定装置において、
前記極小点特定部は、前記極小点が1つのみ特定される前記距離の範囲として、予め定められた距離範囲である特定距離範囲(Ar1)において、前記特性曲線から前記極小点を特定する、レーダ取付角度推定装置。
【請求項3】
請求項2に記載のレーダ取付角度推定装置であって、
前記距離特性特定部は、
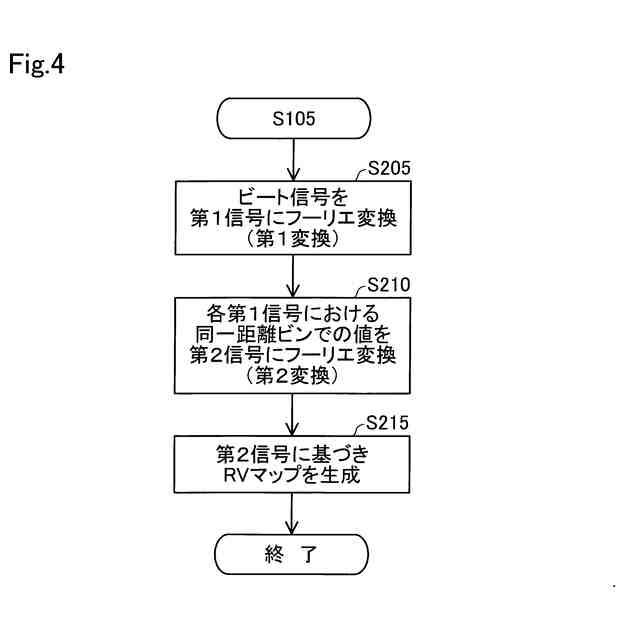
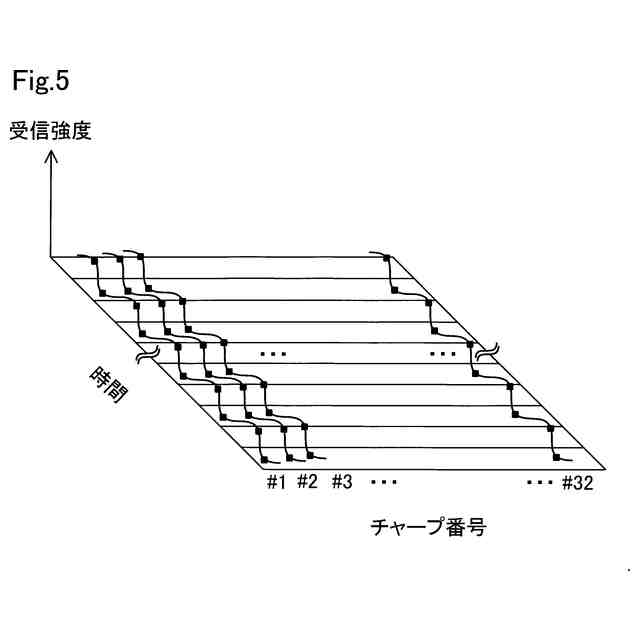
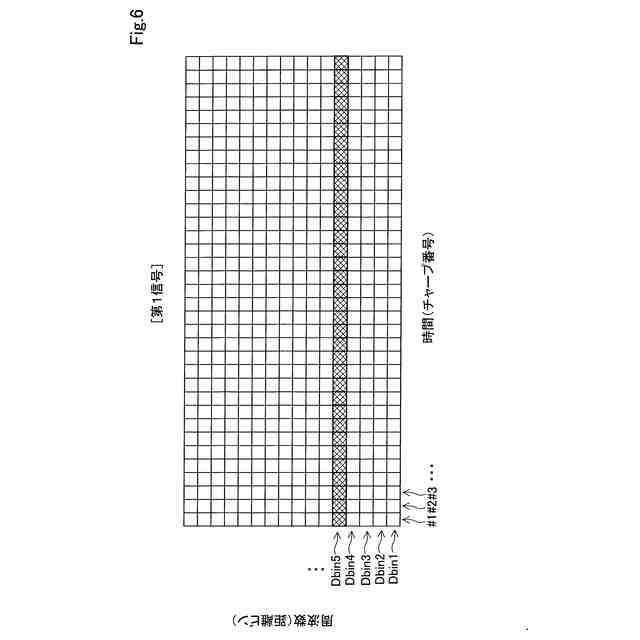
チャープ信号からなる前記放射波と、前記反射波の受信信号(Dw)と、が直交ミキサ(25)によりミキシングされることによって生成されるビート信号(Rx)を、周波数成分が距離ビン毎に表された第1信号にチャープ番号毎にフーリエ変換する第1変換部(111)と、
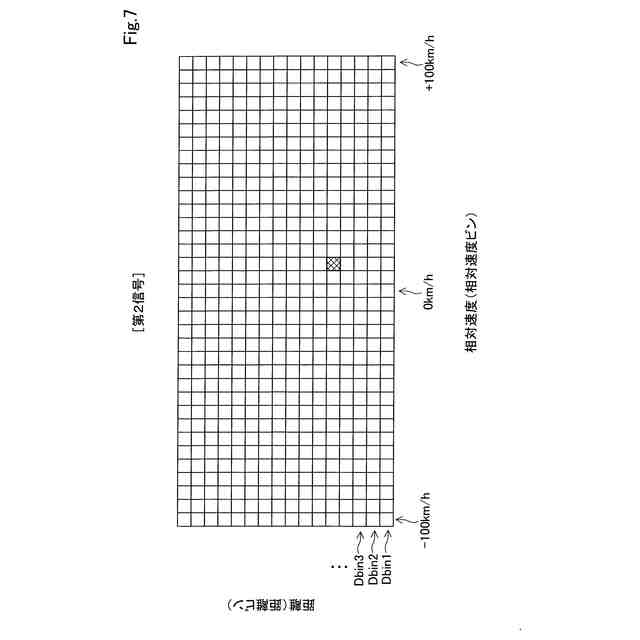
前記チャープ番号毎に得られる複数の前記第1信号における同一の前記距離ビンでの値を、周波数成分が相対速度ビン毎に表された第2信号に、予め定められた時間間隔毎にフーリエ変換する第2変換部(112)と、
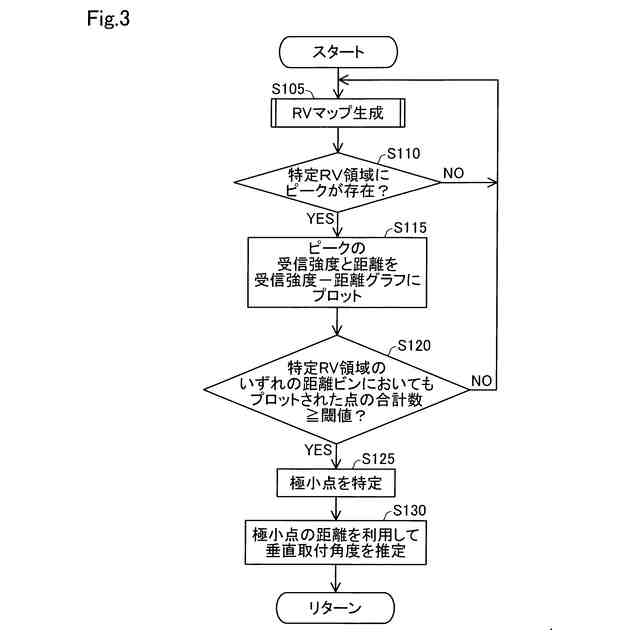
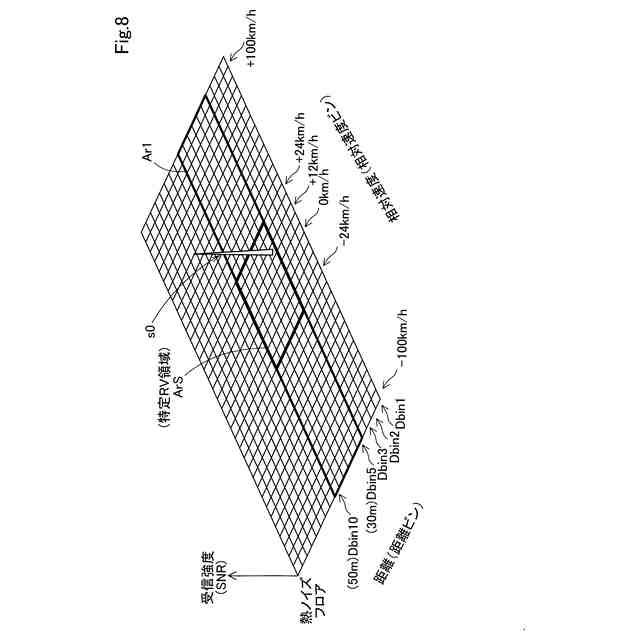
前記第2変換部により得られる前記第2信号に基づき、前記距離ビンおよび前記相対速度ビン毎の前記受信強度を表すRVマップを生成するRVマップ生成部(113)と、
生成された各前記RVマップにおけるピークについて、それぞれ該ピークの前記受信強度および該ピークの前記距離ビンが示す距離を、受信強度-距離グラフにプロットすることにより、前記特性曲線を特定する特性曲線特定部(114)と、
を有する、レーダ取付角度推定装置。
【請求項4】
請求項3に記載のレーダ取付角度推定装置において、
前記特定距離範囲は、前記移動体に対して先行する他の移動体である先行移動体までの進行方向に沿った距離として想定される距離を含む距離範囲である、レーダ取付角度推定装置。
【請求項5】
請求項3に記載のレーダ取付角度推定装置であって、
前記特性曲線特定部は、
前記第2信号が示す物標が前記移動体の正面のみに存在するか否かを、前記第2信号に基づき判定し、
該物標が前記正面のみに存在すると判定された場合に、前記第2信号のピークの前記受信強度および該ピークの前記距離ビンが示す距離を、前記受信強度-距離グラフにプロットし、
該物標が前記正面のみに存在することはないと判定された場合に、前記第2信号のピークの前記受信強度および該ピークの前記距離ビンが示す距離を、前記受信強度-距離グラフにプロットしない、レーダ取付角度推定装置。
【請求項6】
請求項3に記載のレーダ取付角度推定装置において、
前記特性曲線特定部は、
前記RVマップにおける領域であってゼロを含む予め定められた相対速度範囲に相当する前記相対速度ビン、且つ、前記特定距離範囲に相当する前記距離ビンからなる領域である特定RV領域(ArS)内に前記ピークが存在する場合には、該ピークの前記受信強度および該ピークの前記距離ビンが示す距離を、前記受信強度-距離グラフにプロットし、
前記特定RV領域内に前記ピークが存在しない場合には、該ピークの前記受信強度および該ピークの前記距離ビンが示す距離を、前記受信強度-距離グラフにプロットしない、レーダ取付角度推定装置。
【請求項7】
請求項6に記載のレーダ取付角度推定装置において、
前記極小点特定部は、
前記受信強度-距離グラフにプロットされた点の数に対応する各距離ビンにおけるピークの数が予め定められた閾値よりも小さい場合には、前記極小点を特定せず、
前記受信強度-距離グラフにプロットされた点の数に対応する各距離ビンにおけるピークの数が前記閾値以上の場合には、前記極小点を特定する、レーダ取付角度推定装置。
【請求項8】
請求項1に記載のレーダ取付角度推定装置において、
前記角度推定部は、前記極小点の前記距離と、前記垂直取付角度と、が予め対応付けられている垂直取付角度テーブル(201)を参照して、特定された前記極小点における前記距離に基づき、前記垂直取付角度を推定する、レーダ取付角度推定装置。
【請求項9】
物標検出装置(3)であって、
請求項1から請求項6までのいずれか一項に記載のレーダ取付角度推定装置と、
前記受信強度を利用して、前記距離と前記反射点を含む物標の存在する方向とを含む前記物標の位置情報を特定する位置特定部(30)と、
前記レーダ取付角度推定装置により推定された前記垂直取付角度を利用して、前記位置特定部により特定された前記位置情報を、前記垂直取付角度が予め定められた角度である場合の位置情報に補正する位置情報補正部(40)と、
を備える、物標検出装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダ取付角度推定装置および物標検出装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来から、ミリ波レーダなどの所定波長の送信信号を電磁波としてアンテナから放射してその反射波を受信することにより物標の位置や相対速度を検知するレーダが、車両等の移動体に搭載されて用いられている。一般に、レーダは、送信信号を自車両の進行方向に向けてまっすぐに放射するように移動体に取り付けられる。しかし、レーダの垂直取付角度は、経年変化によりずれてしまうおそれがある。この場合、乗用車やトラックにおいては、レーダの垂直取付角度にずれがあると、路面の落下物や、道路の上方に位置する標識などを先行車両として誤認識するおそれがある。特許文献1は、近傍アスファルトからの反射波の受信強度が大きい場合に、レーダが想定される角度よりも下向きにずれていると検知する技術を開示する。特許文献2は、近傍アスファルトからの反射光(クラッタ反射)の受信強度を利用して、レーダの垂直軸ずれ角度を検出している。
【先行技術文献】
【特許文献】
【0003】
特開2015-014593号公報
米国特許第8344940号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の技術では、レーダの垂直取付角度のずれを検知できる一方、そのずれがどの程度であるかまでは特定できない。また、特許文献2の技術では、アスファルト表面の微細構造の種類によって反射波の受信強度が変わるため、レーダの垂直取付角度を正確に特定することはできない。このような問題から、レーダの垂直取付角度を精度良く推定可能な技術が望まれる。
【課題を解決するための手段】
【0005】
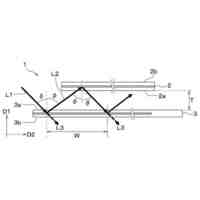
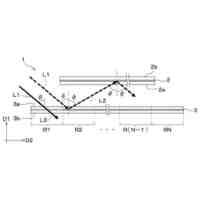
本開示の一形態によれば、移動体(1)に取り付けられているレーダ(2)の垂直取付角度を推定するレーダ取付角度推定装置(10)が提供される。このレーダ取付角度推定装置は、前記レーダからの放射波(Ew)の反射波(Rw)が受信される際の受信強度を利用して、前記反射波の発生元である反射点までの距離に応じた前記受信強度の特性である距離特性を特定する距離特性特定部(110)と、前記距離特性を示す特性曲線における極小点であって、前記反射波を構成する直接反射波(Rw1)と路面を経由する間接反射波(Rw2)との強め合い弱め合いにおける弱め合いにより生じる前記受信強度の極小値を有する極小点を特定する極小点特定部(120)と、特定された前記極小点における前記距離を利用して、前記垂直取付角度を推定する角度推定部(130)と、を備える。
【0006】
この形態のレーダ取付角度推定装置によれば、先行車両からの反射波が受信される際の受信強度と、自車両と先行車両との距離を利用して受信強度・距離特性を特定し、距離特性を示す特性曲線における極小点であって、反射波を構成する直接反射波と間接反射波とが干渉することにより生じる受信強度の極小値を有する極小点を特定し、特定された極小点における距離を利用して、垂直取付角度を推定するので、レーダの垂直取付角度を精度良く推定できる。出願人は、距離特性を示す特性曲線における極小点の距離と、レーダの垂直取付角度との間に相関があることを見いだした。具体的には、直接反射波と間接反射波との経路長差がレーダの垂直取付角度に依存するため、かかる経路長差に起因して、直接反射波と間接反射波とが干渉することにより生じる受信強度の極小値の距離が変わり得ることを見いだした。このため、上述のとおり、本形態のレーダ取付角度推定装置によれば、レーダの垂直取付角度を精度良く推定できる。
【図面の簡単な説明】
【0007】
本開示の一実施形態としてのレーダ取付角度推定装置および物標検出装置を適用した移動体の概略構成を示すブロック図である。
レーダ取付角度推定装置の概略構成を示すブロック図である。
第1実施形態のレーダ取付角度推定処理の手順を示すフローチャートである。
S105の詳細な手順を示すフローチャートである。
第1変換の様子を模式的に示す説明図である。
第1変換によって得られる第1信号を模式的に示す説明図である。
第2変換によって得られる第2信号を模式的に示す説明図である。
RVマップの一例を示す説明図である。
受信強度-距離グラフの一例を示す説明図である。
RVマップの一例を示す説明図である。
垂直取付角度テーブルの設定内容の一例を示す説明図である。
軸ずれに応じた受信強度-距離グラフの変化の一例を示す説明図である。
第2実施形態におけるレーダ取付角度推定処理の手順を示すフローチャートである。
先行移動体の方向と、4つのアンテナにおける反射波の受信状況との関係を模式的に示す説明図である。
【発明を実施するための形態】
【0008】
A.第1実施形態:
A1.全体構成:
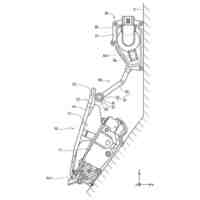
図1に示す車両1は、レーダ2および物標検出装置3を備えている。車両1は、本開示の移動体に相当する。レーダ2は、いわゆるミリ波レーダであり、チャープ信号からなる電磁波としての放射波を車両1の前方に放射し、物標からの反射波を受信する。本実施形態では、レーダ2は、車両1の製造完了時点においては、車両1の前方に向けて放射波を放射するように
車両1に取り付けられている。したがって、放射波の進行方向(伝播する際の軸方向)は、水平方向と略平行となる。本実施形態では、この製造完了時点でのレーダ2の垂直取付角度は、「0度」である。すなわち、垂直取付角度が「0度」のときに、放射波の進行方向は水平方向と平行となる。物標検出装置3は、レーダ2により受信された反射波の受信強度を利用して、物標までの距離、車両1との物標との相対速度、および物標の方向を検出する。
【0009】
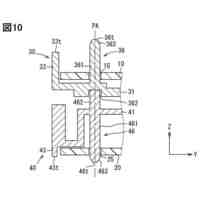
図1において右上に示すように、レーダ2は、信号生成部21と、信号送信部22と、アンテナ23と、直交ミキサ25を有するビート信号生成部24とを備えている。
【0010】
信号生成部21は、例えば、PLL(Phase Locked Loop)回路によって構成され、送信信号TXを生成する。本実施形態における信号生成部21は、送信信号TXとして、周波数が時間に対して線形なチャープ信号を連続的に生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
1か月前
株式会社デンソー
回転機
1か月前
株式会社デンソー
端子台
5日前
株式会社デンソー
電動弁
25日前
株式会社デンソー
分離体
11日前
株式会社デンソー
電動機
3日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
摺動機構
24日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
熱交換器
24日前
株式会社デンソー
検出装置
1か月前
株式会社デンソー
光学部材
11日前
株式会社デンソー
制御装置
27日前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
反力装置
1か月前
株式会社デンソー
電解装置
26日前
株式会社デンソー
光学部材
11日前
株式会社デンソー
摺動機構
24日前
株式会社デンソー
電子装置
25日前
株式会社デンソー
電気回路
19日前
株式会社デンソー
光学部材
3日前
株式会社デンソー
撮像装置
24日前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
撮像装置
24日前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
電子装置
3日前
株式会社デンソー
トランス
3日前
株式会社デンソー
熱交換部材
26日前
株式会社デンソー
半導体装置
26日前
株式会社デンソー
電磁継電器
3日前
株式会社デンソートリム
鞍乗り車両
1か月前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
電流センサ
1か月前
株式会社デンソーテン
インバータ
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
レーダ装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ