TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173379
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078937
出願日
2024-05-14
発明の名称
モータドライバ回路および駆動方法
出願人
ローム株式会社
代理人
個人
,
個人
主分類
H02P
6/17 20160101AFI20251119BHJP(電力の発電,変換,配電)
要約
【課題】三相ブラシレスモータを適切に駆動可能なモータドライバ回路および駆動方法を提供する。
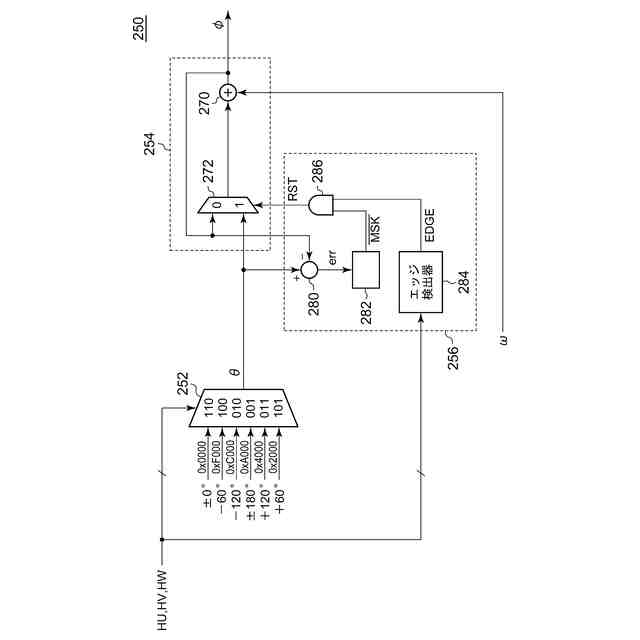
【解決手段】位相信号発生器250は、U相ホール信号、V相ホール信号、W相ホール信号のエッジに応答して、60度刻みで変化する基準位相信号θを生成する。また、現在位相信号φに、モータの回転数に応じた角速度信号ωを累積的に加算する。U相ホール信号、V相ホール信号、W相ホール信号のエッジが発生したときに、現在位相信号φと基準位相信号θとの誤差が所定の範囲に含まれない場合に、現在位相信号φを、基準位相信号θにリセットする。
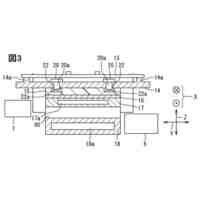
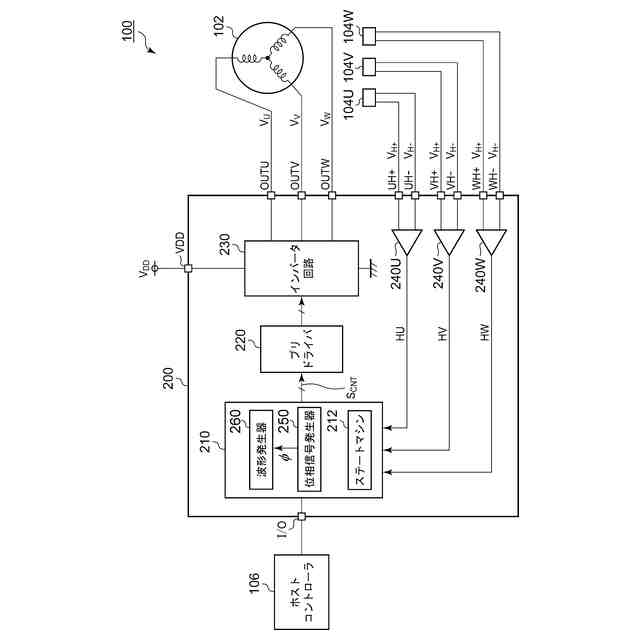
【選択図】図3
特許請求の範囲
【請求項1】
三相ブラシレスモータを駆動するモータドライバ回路であって、
U相ホール信号、V相ホール信号、W相ホール信号にもとづいて、前記三相ブラシレスモータのロータの位置を示す現在位相信号を生成する位相信号発生器を備え、
前記位相信号発生器は、
前記U相ホール信号、前記V相ホール信号、前記W相ホール信号のエッジに応答して、60度刻みで変化する基準位相信号を生成する処理と、
前記現在位相信号に、前記モータの回転数に応じた角速度信号を累積的に加算する積分処理と、
前記U相ホール信号、前記V相ホール信号、前記W相ホール信号のエッジが発生したときに、前記現在位相信号と前記基準位相信号との誤差が所定の範囲に含まれない場合に、前記現在位相信号を、前記基準位相信号にリセットする処理と、
を実行する、モータドライバ回路。
続きを表示(約 1,400 文字)
【請求項2】
前記位相信号発生器は、前記現在位相信号と前記基準位相信号との前記誤差に所定の係数を乗じた値によって、前記角速度信号を補正する、請求項1に記載のモータドライバ回路。
【請求項3】
三相ブラシレスモータを駆動するモータドライバ回路であって、
U相ホール信号、V相ホール信号、W相ホール信号にもとづいて、前記三相ブラシレスモータのロータの位置を示す現在位相信号を生成する位相信号発生器を備え、
前記位相信号発生器は、
前記U相ホール信号、前記V相ホール信号、前記W相ホール信号のエッジに応答して、60度刻みで変化する第1基準位相信号を生成する処理と、
前記モータの回転数に応じた傾きを有するスロープ信号を生成する処理と、
前記U相ホール信号、前記V相ホール信号、前記W相ホール信号のエッジが発生したときに、前記現在位相信号と前記第1基準位相信号との誤差が所定の範囲に含まれない場合、第2基準位相信号を、前記第1基準位相信号の値にリセットし、前記スロープ信号をゼロにリセットする処理と、
前記第2基準位相信号と前記スロープ信号を加算することにより、前記現在位相信号を生成する処理と、
を実行する、モータドライバ回路。
【請求項4】
前記位相信号発生器は、前記現在位相信号と前記基準位相信号との前記誤差に所定の係数を乗じた値によって、前記スロープ信号の前記傾きを補正する、請求項3に記載のモータドライバ回路。
【請求項5】
前記しきい値は、設定可能である、請求項1から4のいずれかに記載のモータドライバ回路。
【請求項6】
前記位相信号発生器は、前記しきい値を前記モータの状態に応じて適応的に変化させる、請求項1から4のいずれかに記載のモータドライバ回路。
【請求項7】
前記位相信号発生器は、前記モータが定速回転するとき、前記しきい値を相対的に大きくし、前記モータが加速または減速するとき、前記しきい値を相対的に小さくする、請求項6に記載のモータドライバ回路。
【請求項8】
ひとつの半導体基板に一体集積化される、請求項1から4のいずれかに記載のモータドライバ回路。
【請求項9】
センサ付き三相ブラシレスモータの駆動方法であって、
U相ホール信号、V相ホール信号、W相ホール信号にもとづいて、前記三相ブラシレスモータのロータの位置を示す現在位相信号を生成するステップを備え、
前記現在位相信号を生成するステップは、
前記U相ホール信号、前記V相ホール信号、前記W相ホール信号のエッジに応答して、60度刻みで変化する基準位相信号を生成するステップと、
前記現在位相信号に、前記モータの回転数に応じた角速度信号を累積的に加算するステップと、
前記U相ホール信号、前記V相ホール信号、前記W相ホール信号のエッジが発生したとき、前記現在位相信号と前記基準位相信号との誤差が所定の範囲に含まれない場合に、前記現在位相信号を、前記基準位相信号にリセットするステップと、
を含む、駆動方法。
【請求項10】
前記現在位相信号を生成するステップは、
前記現在位相信号と前記基準位相信号との前記誤差に所定の係数を乗じた値によって、前記角速度信号を補正するステップをさらに含む、請求項9に記載の駆動方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、三相ブラシレスモータの駆動技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
三相ブラシレスモータを駆動する際、ロータの位置に応じて駆動相を切替える必要がある。三相ブラシレスモータの駆動方式は、ロータの位置検出の方式によって、センサレス方式と、ホールセンサ駆動に分類される。ホールセンサ駆動では、ホール素子などのセンサの出力(ホール信号という)を利用して、ロータの位置を検出する。
【0003】
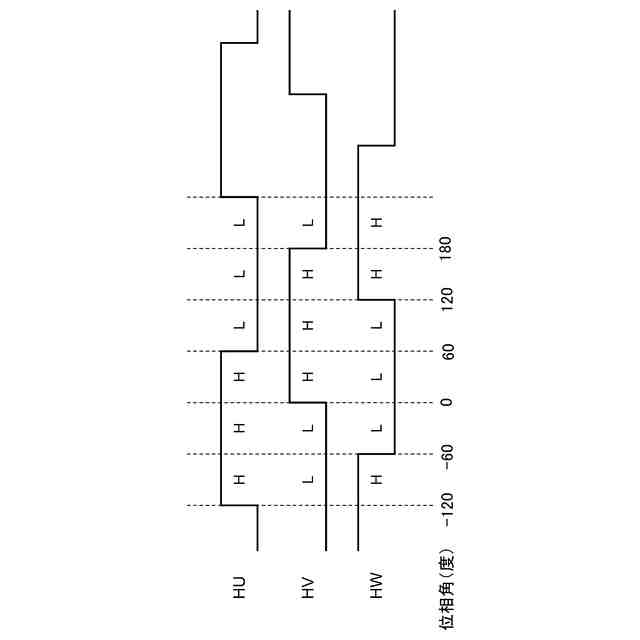
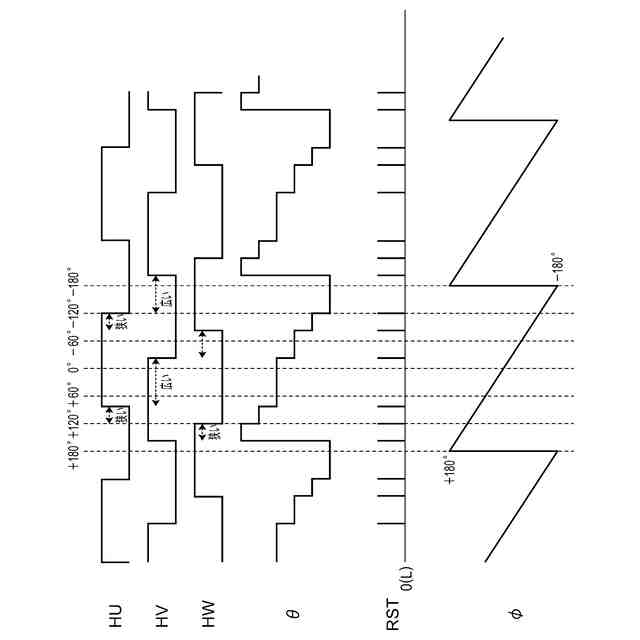
三相ホール素子が、駆動対象のモータに対して適切な位置に取り付けられているとき、三相ホール信号は、50%のデューティサイクルを有し、それらの位相差は120度と等間隔である理想的な波形を有する。しかしながら、三相ホール素子の取り付け位置がずれていると、ホール信号のポジティブエッジ、ネガティブエッジの位置が、理想的な波形からずれてしまう。誤差を有するホール信号にもとづいてモータを駆動すると、騒音や振動の原因となる。180度通電方式(正弦波駆動方式)では、位相角に応じて、コイルに流れる電流を正弦波あるいはそれに類する波形にもとづいて制御する。そのため、ロータの位置(位相角)を正確に知る必要がある。
【先行技術文献】
【特許文献】
【0004】
特開2021-175328号公報
【0005】
[概要]
本開示は係る課題に鑑みてなされたものであり、そのある態様の目的のひとつは、三相ブラシレスモータを適切に駆動可能なモータドライバ回路および駆動方法の提供にある。
【0006】
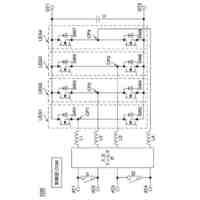
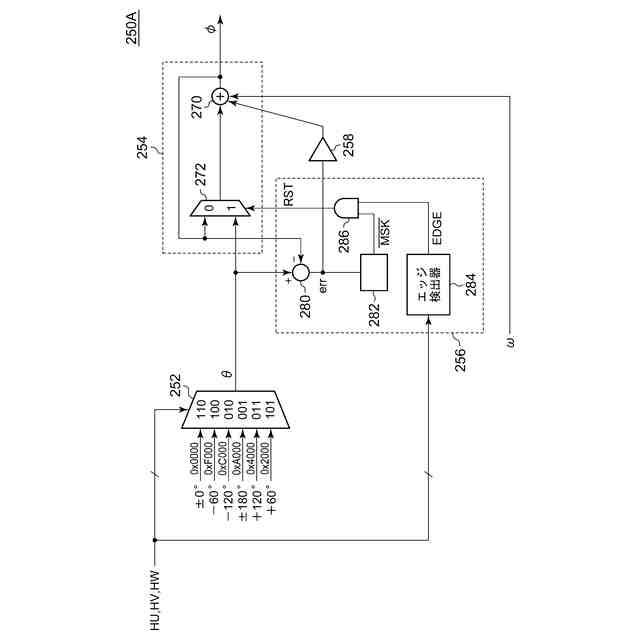
本開示のある態様は、三相ブラシレスモータを駆動するモータドライバ回路に関する。モータドライバ回路は、U相ホール信号、V相ホール信号、W相ホール信号にもとづいて、三相ブラシレスモータのロータの位置を示す現在位相信号を生成する位相信号発生器を備える。位相信号発生器は、U相ホール信号、V相ホール信号、W相ホール信号のエッジに応答して、60度刻みで変化する基準位相信号を生成する処理と、現在位相信号に、モータの回転数に応じた角速度信号を累積的に加算する積分処理と、U相ホール信号、V相ホール信号、W相ホール信号のエッジが発生したときに、現在位相信号と基準位相信号との誤差が所定の範囲に含まれない場合に、現在位相信号を、基準位相信号にリセットする処理と、を実行する。
【0007】
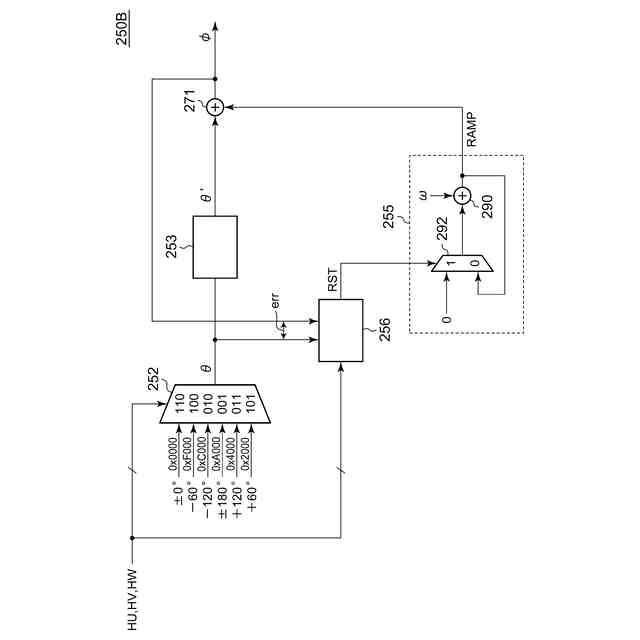
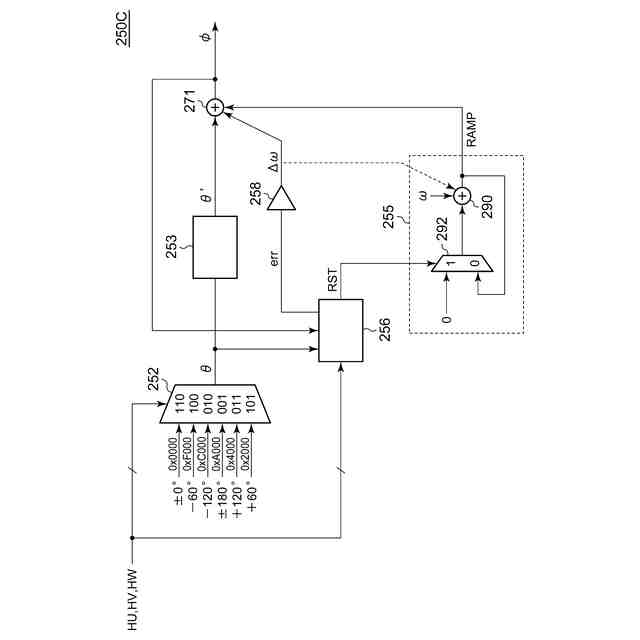
本開示の別の態様もまた、三相ブラシレスモータを駆動するモータドライバ回路に関する。モータドライバ回路は、U相ホール信号、V相ホール信号、W相ホール信号にもとづいて、三相ブラシレスモータのロータの位置を示す現在位相信号を生成する位相信号発生器を備える。位相信号発生器は、U相ホール信号、V相ホール信号、W相ホール信号のエッジに応答して、60度刻みで変化する第1基準位相信号を生成する処理と、モータの回転数に応じた傾きを有するスロープ信号を生成する処理と、U相ホール信号、V相ホール信号、W相ホール信号のエッジに応答して、60度刻みで変化する第1基準位相信号を生成する処理と、U相ホール信号、V相ホール信号、W相ホール信号のエッジが発生したときに、現在位相信号と第1基準位相信号との誤差が所定の範囲に含まれない場合、第2基準位相信号を、第1基準位相信号の値にリセットし、スロープ信号をリセットする処理と、第2基準位相信号とスロープ信号を加算することにより、現在位相信号を生成する処理と、を実行する。
【0008】
本開示のさらに別の態様は、センサ付き三相ブラシレスモータの駆動方法に関する。駆動方法は、U相ホール信号、V相ホール信号、W相ホール信号にもとづいて、三相ブラシレスモータのロータの位置を示す現在位相信号を生成するステップを備える。現在位相信号を生成するステップは、U相ホール信号、V相ホール信号、W相ホール信号のエッジに応答して、60度刻みで変化する基準位相信号を生成するステップと、現在位相信号に、モータの回転数に応じた角速度信号を累積的に加算するステップと、U相ホール信号、V相ホール信号、W相ホール信号のエッジが発生したとき、現在位相信号と基準位相信号との誤差が所定の範囲に含まれない場合に、現在位相信号を、基準位相信号にリセットするステップと、を含む。
【0009】
本開示のさらに別の態様もまた、三相ブラシレスモータの駆動方法に関する。駆動方法は、U相ホール信号、V相ホール信号、W相ホール信号にもとづいて、三相ブラシレスモータのロータの位置を示す現在位相信号を生成するステップを備える。現在位相信号を生成するステップは、U相ホール信号、V相ホール信号、W相ホール信号のエッジに応答して、60度刻みで変化する第1基準位相信号を生成するステップと、モータの回転数に応じた傾きを有するスロープ信号を生成するステップと、U相ホール信号、V相ホール信号、W相ホール信号のエッジが発生したときに、現在位相信号と第1基準位相信号との誤差が所定の範囲に含まれない場合、第2基準位相信号を、第1基準位相信号の値にリセットし、スロープ信号をリセットする処理と、第2基準位相信号とスロープ信号を加算することにより、現在位相信号を生成する処理と、を実行する。
【0010】
なお、以上の構成要素の任意の組み合わせや本開示の構成要素や表現を、方法、装置、システムなどの間で相互に置換したものもまた、本開示の態様として有効である。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
高圧電気機器の開閉器
8日前
個人
電気を重力で発電装置
21日前
キヤノン電子株式会社
モータ
28日前
キヤノン電子株式会社
モータ
20日前
日星電気株式会社
ケーブル組立体
1か月前
コーセル株式会社
電源装置
29日前
トヨタ自動車株式会社
モータ
20日前
株式会社アイドゥス企画
減反モータ
8日前
株式会社デンソー
端子台
1日前
個人
二次電池繰返パルス放電器用印刷基板
1か月前
株式会社デンソー
電力変換装置
1か月前
トヨタ自動車株式会社
固定子の加熱装置
1か月前
矢崎総業株式会社
電源回路
7日前
株式会社TMEIC
制御装置
今日
矢崎総業株式会社
給電装置
今日
トヨタ自動車株式会社
ステータの製造装置
21日前
大和ハウス工業株式会社
敷設用機器
今日
山洋電気株式会社
モータ
1か月前
日産自動車株式会社
ロータシャフト
15日前
日産自動車株式会社
ロータシャフト
15日前
ローム株式会社
モータドライバ回路
15日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
15日前
株式会社アイシン
電力変換装置
20日前
株式会社明治ゴム化成
ワイヤレス給電用部品
1か月前
トヨタ自動車株式会社
可変界磁ロータ
23日前
個人
電線盗難防止方法及び電線盗難防止装置
28日前
トヨタ紡織株式会社
ロータの製造装置
29日前
株式会社マキタ
電動作業機
28日前
京商株式会社
模型用非接触電力供給システム
8日前
株式会社TMEIC
電力変換装置
今日
トヨタ自動車株式会社
車両照合システム
28日前
トヨタ自動車株式会社
熱利用回路
1日前
株式会社豊田自動織機
電力供給システム
20日前
株式会社ダイフク
非接触給電設備
1か月前
ニデック株式会社
回転電機
20日前
ルネサスエレクトロニクス株式会社
半導体装置
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ