TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025172493
公報種別
公開特許公報(A)
公開日
2025-11-26
出願番号
2024078027
出願日
2024-05-13
発明の名称
制御装置、曲げ加工システム、ロボット制御方法及びロボット制御プログラム
出願人
株式会社アマダ
代理人
弁理士法人きさらぎ国際特許事務所
主分類
B25J
19/06 20060101AFI20251118BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ユーザの安全を確保しつつ省スペースで協働ロボットを使用できる制御装置、曲げ加工システム、ロボット制御方法及びロボット制御プログラム。
【解決手段】搬送対象に対してワークを搬送する多関節協働ロボットを制御可能な制御部を備え、前記制御部は、前記搬送対象から前記ワークを搬出する搬出動作及び前記搬送対象に向けて前記ワークを搬入する搬入動作の少なくとも一方において、前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行して動作させるように構成されている。
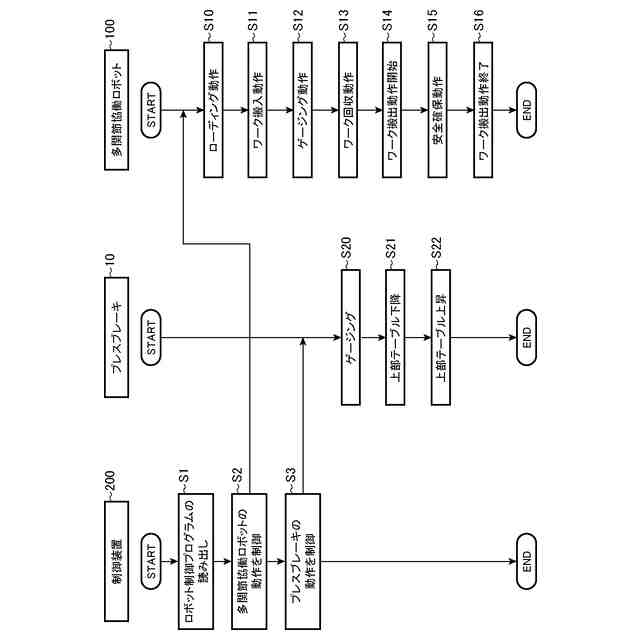
【選択図】図7
特許請求の範囲
【請求項1】
搬送対象に対してワークを搬送する多関節協働ロボットを制御可能な制御部を備え、
前記制御部は、前記搬送対象から前記ワークを搬出する搬出動作及び前記搬送対象に向けて前記ワークを搬入する搬入動作の少なくとも一方において、前記多関節協働ロボットに安全確保動作を実行させるよう構成されており、
前記安全確保動作は、前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含む
制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記制御部は、前記安全確保動作において、前記多関節協働ロボットの関節部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行して動作させるように構成されている
請求項1に記載の制御装置。
【請求項3】
前記制御部は、前記安全確保動作において、前記多関節協働ロボットの最もロボットハンド側に位置する前記関節部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行して動作させるように構成されている
請求項2に記載の制御装置。
【請求項4】
前記制御部は、前記多関節協働ロボットへのユーザの接近状況を判定可能に構成されており、前記ユーザが前記多関節協働ロボットへ接近したと判定した場合、前記ワークを保持した前記多関節協働ロボットに前記安全確保動作を実行させるように構成されている
請求項1~3のいずれか1項に記載の制御装置。
【請求項5】
前記制御部は、
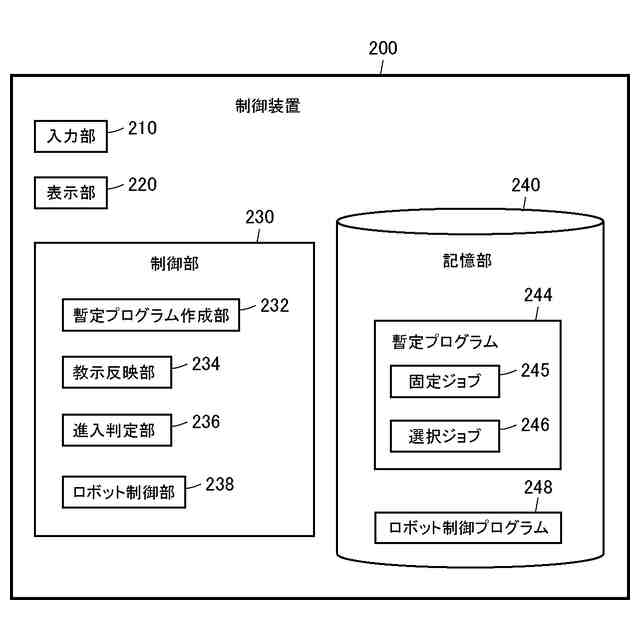
少なくとも前記多関節協働ロボットを制御する暫定プログラムを作成可能に構成される暫定プログラム作成部と、
前記多関節協働ロボットを制御可能に構成されるロボット制御部と
を含み、
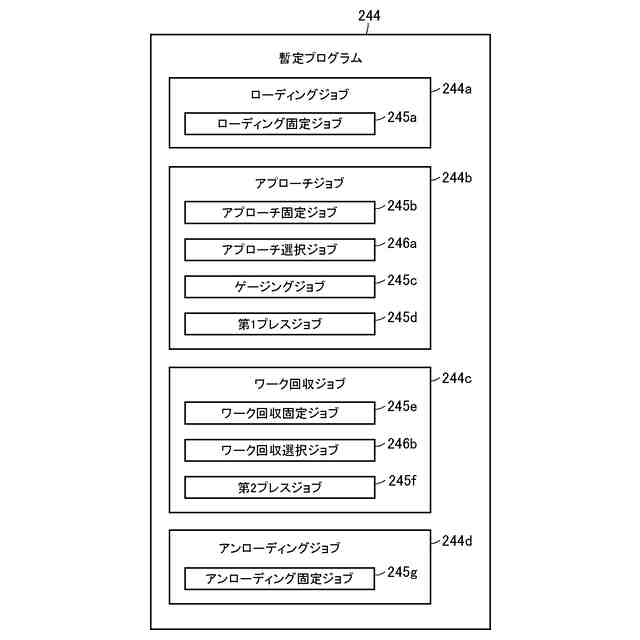
前記暫定プログラムは、前記多関節協働ロボットの各動作に対応する複数のジョブを含み、
前記ロボット制御部は、前記ワークの搬送に関するジョブに基づいて、前記搬出動作及び前記搬入動作の少なくとも一方において、前記安全確保動作を実行させるべきか否かを判定するように構成されている
請求項1~3のいずれか1項に記載の制御装置。
【請求項6】
前記複数のジョブは、選択ジョブを含み、
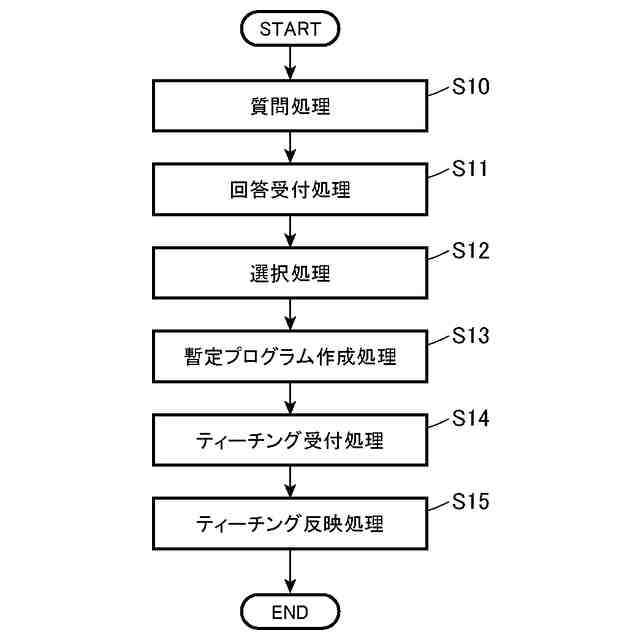
前記暫定プログラム作成部は、
ユーザに質問をする質問処理と、
前記ユーザの回答を受け付ける回答受付処理と、
前記回答に基づいて前記暫定プログラム毎に自動的に候補となる複数の前記選択ジョブから前記選択ジョブを選択する選択処理と、
選択した前記選択ジョブを含む前記暫定プログラムを作成する暫定プログラム作成処理と
を実行可能に構成されており、
前記ロボット制御部は、前記ワークの搬送に関する前記選択ジョブに基づいて、前記搬出動作及び前記搬入動作の少なくとも一方において、前記安全確保動作を実行させるべきか否かを判定するように構成されている
請求項5に記載の制御装置。
【請求項7】
前記安全確保動作は、ユーザが手動により通常動作に変更可能に構成されている
請求項1~3のいずれか1項に記載の制御装置。
【請求項8】
搬送対象に対してワークを搬送する多関節協働ロボットと、
前記多関節協働ロボットを制御可能な制御部を含む制御装置と
を備え、
前記制御部は、前記搬送対象から前記ワークを搬出する搬出動作及び前記搬送対象に向けて前記ワークを搬入する搬入動作の少なくとも一方において、前記多関節協働ロボットに安全確保動作を実行させるよう構成されており、
前記安全確保動作は、前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含む
曲げ加工システム。
【請求項9】
搬送対象に対してワークを搬送する多関節協働ロボットが、
前記搬送対象から前記ワークを搬出する搬出動作と、
前記搬送対象に向けて前記ワークを搬入する搬入動作と、
前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含む安全確保動作と
を実行し、
前記安全確保動作は、前記搬出動作及び前記搬入動作の少なくとも一方において実行される
ロボット制御方法。
【請求項10】
搬送対象に対してワークを搬送する多関節協働ロボットに、
前記搬送対象から前記ワークを搬出する搬出動作と、
前記搬送対象に向けて前記ワークを搬入する搬入動作と、
前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含む安全確保動作と
を実行させ、
前記安全確保動作は、前記搬出動作及び前記搬入動作の少なくとも一方において実行される
ロボット制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、曲げ加工システム、ロボット制御方法及びロボット制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
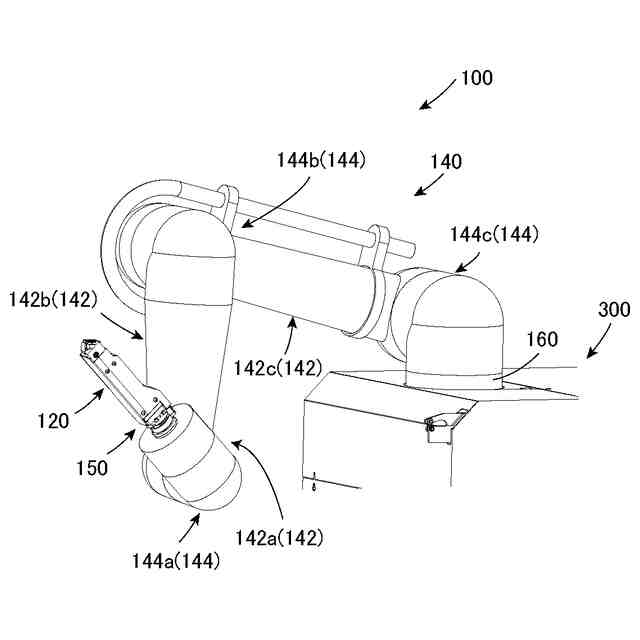
従来、プレスブレーキのパンチとダイを搭載する金型搭載用ストッカと、曲げロボットが使用するハンドを搭載するハンド搭載用ストッカとを備えた金型・ハンド格納装置が知られている(例えば、特許文献1)。特許文献1のシステムでは、プレスブレーキの側方に金型・ハンド格納装置が設置されると共に、プレスブレーキ及び金型・ハンド格納装置の前方に曲げロボットが設置されており、これらプレスブレーキ、金型・ハンド格納装置及び曲げロボットの全体が安全柵で包囲されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-4604号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、安全柵で包囲する従来のシステムでは、設置場所を広く確保する必要があるという問題がある。
【0005】
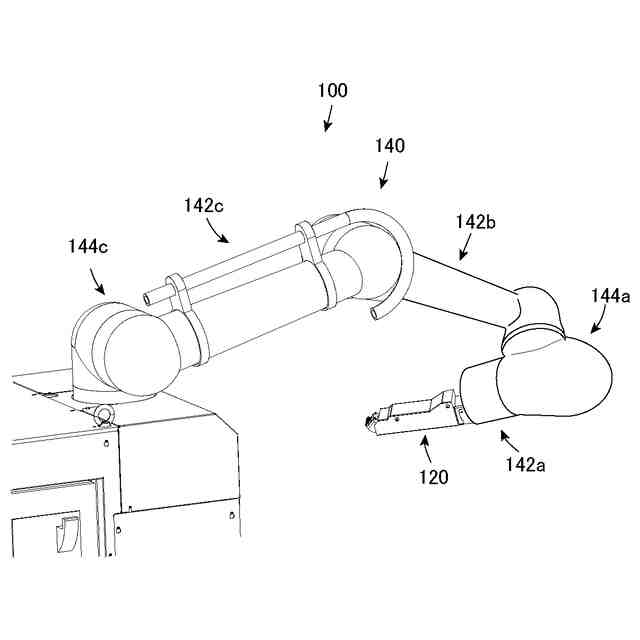
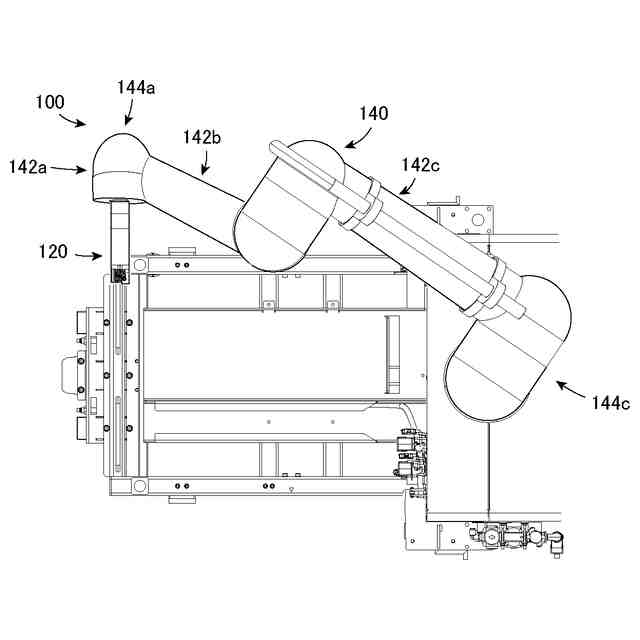
このような問題を解決する一つの手段として、ユーザとの接触を感知すると動作を停止する協働ロボットを、曲げロボットとして採用することが考えられる。このような協働ロボットを採用することにより、ユーザの負傷リスクを低減させることが可能となり、安全柵を排除することが可能となるからである。しかしながら、協働ロボットが安全であるとしても、協働ロボットによって搬送されるワークは鋭利な部位を有することが多いため、搬送中のワークにユーザが接触し、負傷するおそれがあるという更なる問題が生じる。
【0006】
本発明の一態様は、ユーザの安全を確保しつつ省スペースで協働ロボットを使用できる制御装置、曲げ加工システム、ロボット制御方法及びロボット制御プログラムである。
【課題を解決するための手段】
【0007】
本発明の一態様に係る制御装置は、搬送対象に対してワークを搬送する多関節協働ロボットを制御可能な制御部を備え、前記制御部は、前記搬送対象から前記ワークを搬出する搬出動作及び前記搬送対象に向けて前記ワークを搬入する搬入動作の少なくとも一方において、前記多関節協働ロボットに安全確保動作を実行させるよう構成されており、前記安全確保動作は、前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含んでいる。
【0008】
本発明の一態様に係る曲げ加工システムは、搬送対象に対してワークを搬送する多関節協働ロボットと、前記多関節協働ロボットを制御可能な制御部を含む制御装置とを備え、前記制御部は、前記搬送対象から前記ワークを搬出する搬出動作及び前記搬送対象に向けて前記ワークを搬入する搬入動作の少なくとも一方において、前記多関節協働ロボットに安全確保動作を実行させるよう構成されており、前記安全確保動作は、前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含んでいる。
【0009】
本発明の一態様に係るロボット制御方法は、搬送対象に対してワークを搬送する多関節協働ロボットが、前記搬送対象から前記ワークを搬出する搬出動作と、前記搬送対象に向けて前記ワークを搬入する搬入動作と、前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含む安全確保動作とを実行し、前記安全確保動作は、前記搬出動作及び前記搬入動作の少なくとも一方において実行される。
【0010】
本発明の一態様に係るロボット制御プログラムは、搬送対象に対してワークを搬送する多関節協働ロボットに、前記搬送対象から前記ワークを搬出する搬出動作と、前記搬送対象に向けて前記ワークを搬入する搬入動作と、前記多関節協働ロボットの少なくとも一部が前記ワークの進行方向の前方に位置するよう、前記多関節協働ロボットを前記ワークよりも先行させる動作を含む安全確保動作とを実行させ、前記安全確保動作は、前記搬出動作及び前記搬入動作の少なくとも一方において実行される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アマダ
無人搬送車
1か月前
株式会社アマダ
ビード形成方法
28日前
株式会社アマダ
工作機械制御装置
1か月前
株式会社アマダ
見積り作成システム
1か月前
株式会社アマダ
金型管理装置及び加工機制御装置
1か月前
株式会社アマダ
曲げ加工システム及びロボット搬送体
今日
株式会社アマダ
加工システム及び加工性判定システム
1か月前
株式会社アマダ
ガルバノスキャナユニット及びレーザ加工機
20日前
株式会社アマダ
プレスブレーキ制御装置及び曲げ速度算出方法
1か月前
株式会社アマダ
干渉確認システム、干渉確認方法及び曲げ加工機
21日前
株式会社アマダ
プレスブレーキ及びプレスブレーキの金型位置決め方法
1か月前
株式会社アマダ
生産管理システム、生産管理方法及び生産管理プログラム
1か月前
株式会社アマダ
制御装置、溶接加工システム、教示点判定方法及び教示点判定プログラム
21日前
株式会社アマダ
制御装置、曲げ加工システム、ロボット制御方法及びロボット制御プログラム
今日
株式会社アマダ
制御装置、曲げ加工システム、制御プログラム作成方法及び制御プログラム作成プログラム
今日
株式会社アマダ
生産管理システム、生産シミュレーション装置、生産シミュレーション方法及び生産シミュレーションプログラム
1か月前
個人
手持ち挟持具
21日前
トヨタ自動車株式会社
学習装置
6日前
株式会社不二越
垂直多関節ロボット
6日前
株式会社三共コーポレーション
工具保持具
21日前
ニデックインスツルメンツ株式会社
産業用ロボット
19日前
株式会社マキタ
電動工具
6日前
株式会社田村製作所
エンドエフェクタ及びロボット装置
19日前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
7日前
日本発條株式会社
ケーブルユニット及びその製造方法
19日前
株式会社デンソー
ワーク投入装置
19日前
トヨタ自動車株式会社
ロボットの保護カバーの挟み込み防止構造
22日前
パナソニック株式会社
インパクト回転工具
6日前
マクセルイズミ株式会社
電動工具
20日前
株式会社三五
配管用マーキング装置
19日前
パナソニック株式会社
電動工具及び電動工具システム
21日前
株式会社CoLab
制御装置、制御方法、及びプログラム
19日前
株式会社CoLab
制御装置、制御方法、及びプログラム
19日前
株式会社CoLab
制御装置、制御方法、及びプログラム
19日前
三ツ星ベルト株式会社
筒状体取付方法および筒状体取付装置
今日
日本建設工業株式会社
打撃レンチ、治具、及び工具セット
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ