TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025166620
公報種別
公開特許公報(A)
公開日
2025-11-06
出願番号
2024070782
出願日
2024-04-24
発明の名称
電動工具
出願人
マクセルイズミ株式会社
代理人
弁理士法人綿貫国際特許・商標事務所
主分類
B25B
25/00 20060101AFI20251029BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】小型かつ軽量な構成にしつつ、被加工物のプレス加工に必要な推力に到達可能な構造の電動工具を提供することを目的とする。
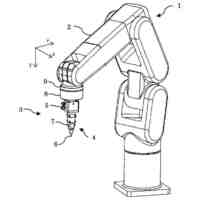
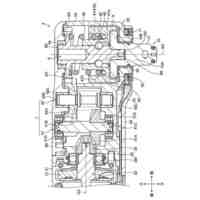
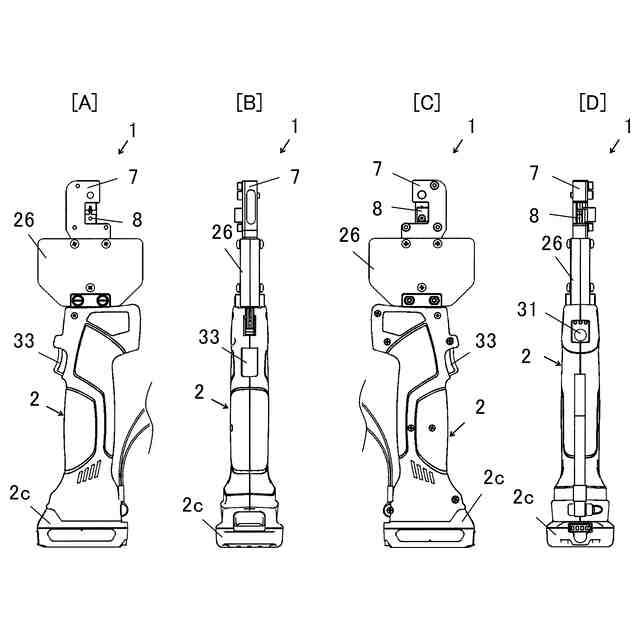
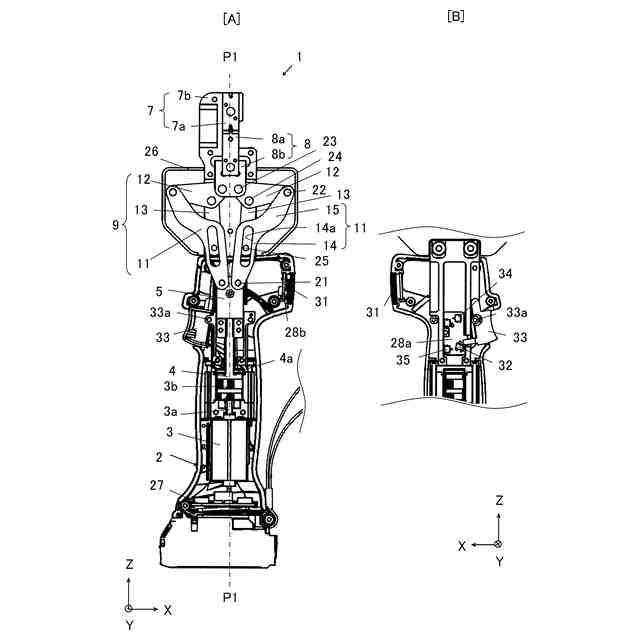
【解決手段】電動工具1は、電動モータ3と送りねじ4とスライダ5を有する本体2と、本体2に連結された工具ヘッド6を備える。工具ヘッド6は、本体2に連結された受部7と、スライダ5に連結されたトグルリンク9と、トグルリンク9に連結された押部8を有する。トグルリンク9は、送りねじ4の軸線P1に対して対称位置に一対で配されている。
【選択図】図1
特許請求の範囲
【請求項1】
電動モータと前記電動モータに連結された送りねじと前記送りねじに連結されたスライダを有する本体と、前記本体に連結された工具ヘッドを備え、被加工物をプレス加工する電動工具であって、
前記工具ヘッドは、前記本体に連結された受部と前記スライダに連結されたトグルリンクと前記トグルリンクに連結された押部を有し、前記トグルリンクは、前記送りねじの軸線に対して対称位置に一対で配されていること
を特徴とする電動工具。
続きを表示(約 1,400 文字)
【請求項2】
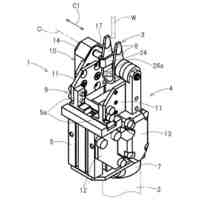
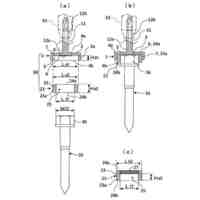
前記トグルリンクは、ガイド部が形成された第1腕と前記第1腕から延設した第2腕を有するとともに前記第1腕が第1ピンによって前記スライダに連結される第1部材と、第2ピンによって前記第2腕に連結されるとともに第3ピンによって前記押部に連結される第2部材と、第4ピンによって前記第2部材に連結されるとともに第5ピンによって前記ガイド部に係合される第3部材を有し、前記第5ピンが前記ガイド部の内側を摺動すること
を特徴とする請求項1に記載の電動工具。
【請求項3】
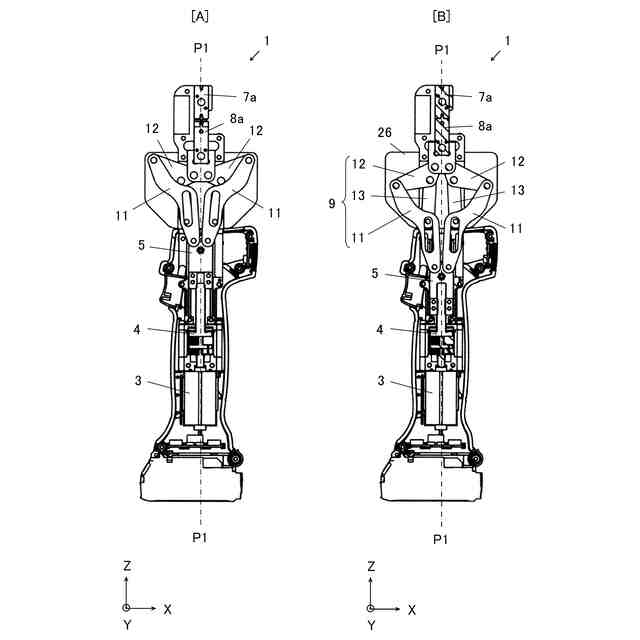
前記トグルリンクは、前記第2ピンが前記第3部材よりも前記軸線から離れた位置に配されており、前記第2ピンが前記第4ピンよりも前記第5ピンに近づいて前記被加工物をプレス加工し、前記第2ピンが前記第4ピンよりも前記第5ピンから離れて前記受部から前記被加工物を取り出し可能にすること
を特徴とする請求項2に記載の電動工具。
【請求項4】
前記軸線に対して直交する方向に前記被加工物が配されており、前記軸線に対して直交する方向に前記第2ピンが配されており、前記被加工物を長手方向に通る中心線に対して前記第2ピンが離れる方向に移動することで前記被加工物をプレス加工し、前記中心線に対して前記第2ピンが近づく方向に移動することで前記受部から前記被加工物を取り出し可能にすること
を特徴とする請求項2に記載の電動工具。
【請求項5】
前記工具ヘッドは、前記トグルリンクを覆う一対のカバーを有し、前記中心線の方向と同じ方向において、前記本体の厚みよりも前記カバーの厚みが小さいこと
を特徴とする請求項4に記載の電動工具。
【請求項6】
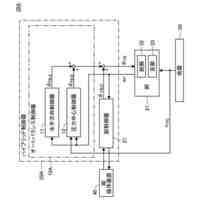
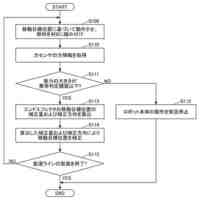
前記本体は、前記電動モータを駆動制御する制御部と、前記スライダが下限位置に移動することで作動する下限スイッチと、前記電動モータの電流値を検知する電流センサを有し、
前記制御部は、前記スライダが前記下限位置に移動して前記下限スイッチが作動した時点の前記電流値が設定値に未達のときは前記被加工物の加工が未完了であると判断して前記電流値が前記設定値に到達するまで前記電動モータの作動を続ける制御をすること
を特徴とする請求項2に記載の電動工具。
【請求項7】
前記本体は、前記スライダが上限位置に移動することで作動する上限スイッチと、作業者が握るトリガーレバーに連動して作動するトリガースイッチを有し、
前記トリガースイッチが作動すると前記電動モータが正回転し、前記制御部が前記被加工物の加工が完了したと判断すると前記電動モータが逆回転し、前記スライダが前記上限位置に移動して前記上限スイッチが作動すると前記電動モータが停止すること
を特徴とする請求項6に記載の電動工具。
【請求項8】
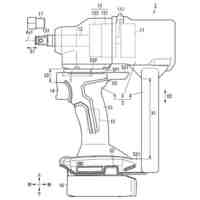
前記本体は、前記送りねじと前記電動モータとを連結する減速機と、前記減速機が配されたハンドル部と、前記電動モータに電力を供給するバッテリパックと、前記バッテリパックを脱着可能に取付ける取付部を有し、
前記バッテリパックの電力によって前記電動モータを駆動し前記被加工物の圧縮または圧着若しくは切断をすること
を特徴とする請求項1~7のいずれか一項に記載の電動工具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圧着端子等の被加工物をプレス加工する電動工具に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、固定顎部と可動顎部を有する工具ヘッドと、カムと電動モータを有する本体を組み合わせた電動工具が提案されている(特許文献1:独国特許出願公開第19709017号明細書)。また、互いに回動可能に連結された1組の顎部を有する工具ヘッドと、送りねじと電動モータを有する本体を組み合わせた電動工具が知られている(特許文献2:特開2022-187472号公報)。
【先行技術文献】
【特許文献】
【0003】
独国特許出願公開第19709017号明細書
特開2022-187472号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、被加工物の種別に応じて、直動式電動工具と挟み式電動工具とが使い分けされている。一例として、電子機器や通信機器や電気機器における弱電流電線と圧着端子または弱電流電線とスリーブを圧着する場合は、直動式電動工具が用いられている。
【0005】
近年、端子形状やサイズ等の種別が多様化しており、弱電流電線と圧着端子またはスリーブを圧着する際に、500kgfの推力が必要な場合がある。油圧ポンプを用いた構成は、被加工物の圧縮や圧着や切断等のプレス加工に必要な推力に到達できる反面、大型で大重量になってしまい、使い勝手が良くない。特許文献1に記載のカムを用いた構成は、必要な推力に到達できるようにするために、大型かつ堅牢なカムが必要になるので、実用的ではない。また、特許文献2は挟み式工具であるため、直動式工具への応用が難しい。
【課題を解決するための手段】
【0006】
本発明は、上記事情に鑑みてなされ、小型かつ軽量な構成にしつつ、被加工物のプレス加工に必要な推力に到達可能な構造の電動工具を提供することを目的とする。
【0007】
本発明は、一実施形態として、以下に開示する解決策により、前記課題を解決する。
【0008】
本発明に係る電動工具は、電動モータと前記電動モータに連結された送りねじと前記送りねじに連結されたスライダを有する本体と、前記本体に連結された工具ヘッドを備え、被加工物をプレス加工する電動工具であって、前記工具ヘッドは、前記本体に連結された受部と前記スライダに連結されたトグルリンクと前記トグルリンクに連結された押部を有し、前記トグルリンクは、前記送りねじの軸線に対して対称位置に一対で配されていることを特徴とする。
【0009】
この構成によれば、トグルリンクを用いることで、推力を増大させるとともに、カムを用いた構成に比べて小型化および軽量化を図ることができる。尚且つ、送りねじの軸線に対して対称位置に一対のトグルリンクを配設したことで、一対のトグルリンクによって、プレス加工時に受ける反力を1/2ずつに分担しつつ、軸線上の被加工物に対して均等にプレス加工することができる。よって、小型かつ軽量な構成にしつつ、被加工物のプレス加工に必要な推力500kgfに到達できる。
【0010】
一例として、前記トグルリンクは、ガイド部が形成された第1腕と前記第1腕から延設した第2腕を有するとともに前記第1腕が第1ピンによって前記スライダに連結される第1部材と、第2ピンによって前記第2腕に連結されるとともに第3ピンによって前記押部に連結される第2部材と、第4ピンによって前記第2部材に連結されるとともに第5ピンによって前記ガイド部に係合される第3部材を有し、前記第5ピンが前記ガイド部の内側を摺動する。この構成によれば、送りねじの牽引力を2倍超に増大させつつ、軸線上の被加工物に対して均等にプレス加工することができる。一例として、前記ガイド部は、長穴形状または溝形状である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
手持ち挟持具
1か月前
トヨタ自動車株式会社
学習装置
21日前
CKD株式会社
把持装置
6日前
ダイセイ株式会社
ロボット自動刻印装置
6日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
瓜生製作株式会社
電動締付工具
14日前
株式会社安川電機
ロボット
1か月前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社マキタ
集塵アタッチメント
13日前
株式会社やまびこ
電動作業機
今日
株式会社不二越
垂直多関節ロボット
21日前
トヨタ自動車株式会社
ロボットハンド
1か月前
新電元工業株式会社
インピーダンス制御装置
今日
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
現場用作業機
1か月前
パナソニック株式会社
工具
今日
住友重機械工業株式会社
ロボット教示装置
1日前
株式会社マキタ
電動工具
21日前
株式会社マキタ
作業機
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
学校法人立命館
ロボットハンド制御システム
1か月前
NTN株式会社
把持装置
6日前
株式会社マキタ
電動作業機
1日前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
国立大学法人東京科学大学
多自由度入力装置用制御装置
13日前
ファナック株式会社
経路データセット生成
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
1か月前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
株式会社人機一体
有脚ロボット
1か月前
ダイハツ工業株式会社
ロボット制御システム
6日前
積水ハウス株式会社
固定ピン保持用アタッチメント
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
22日前
ミネベアミツミ株式会社
ロボット装置、および位置補正方法
1日前
カツデン株式会社
回転工具用治具
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ