TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165725
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2024069989
出願日
2024-04-23
発明の名称
干渉確認システム、干渉確認方法及び曲げ加工機
出願人
株式会社アマダ
代理人
弁理士法人きさらぎ国際特許事務所
主分類
B21D
5/02 20060101AFI20251028BHJP(本質的には材料の除去が行なわれない機械的金属加工;金属の打抜き)
要約
【課題】ワークと下金型との干渉確認を容易に行うことが可能な干渉確認システム、干渉確認方法及び曲げ加工装置。
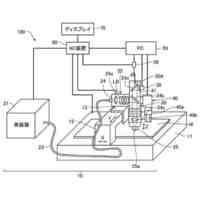
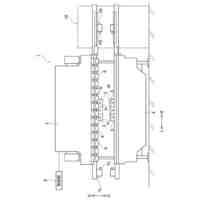
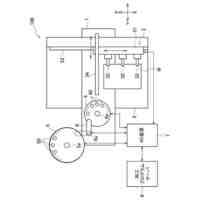
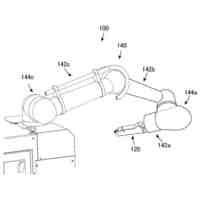
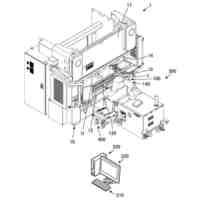
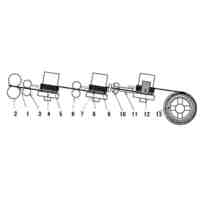
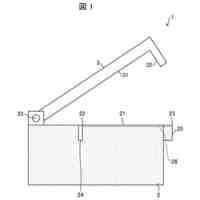
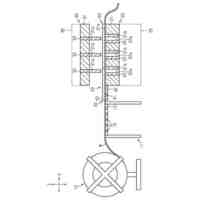
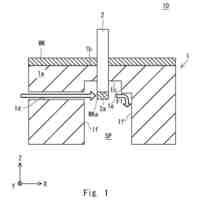
【解決手段】上金型と、下金型と、前記下金型の後方において移動可能に設けられるバックゲージと、前記バックゲージに取り付けられる撮像部とを備える曲げ加工機と、ワークを前記上金型及び前記下金型間に搬送可能に構成されるワーク保持ロボットと、前記曲げ加工機及び前記ワーク保持ロボットを制御する制御部と、前記撮像部により撮像された撮像画像を表示する表示部とを備え、前記制御部は、前記バックゲージの移動を制御するバックゲージ制御部を有しており、前記バックゲージ制御部は、前記上金型及び前記下金型間に対する前記ワークの搬入前又は搬出前において、前記撮像部が前記下金型の上端を水平に撮像可能な位置となるように前記バックゲージを移動させるよう構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
上金型と、下金型と、前記下金型の後方において移動可能に設けられるバックゲージと、前記バックゲージに取り付けられる撮像部とを備える曲げ加工機と、
ワークを前記上金型及び前記下金型間に搬送可能に構成されるワーク保持ロボットと、
前記曲げ加工機及び前記ワーク保持ロボットを制御する制御部と、
前記撮像部により撮像された撮像画像を表示する表示部と
を備え、
前記制御部は、前記バックゲージの移動を制御するバックゲージ制御部を有しており、
前記バックゲージ制御部は、前記上金型及び前記下金型間に対する前記ワークの搬入前又は搬出前において、前記撮像部が前記下金型の上端を水平に撮像可能な位置となるように前記バックゲージを移動させるよう構成されている
干渉確認システム。
続きを表示(約 1,600 文字)
【請求項2】
前記バックゲージ制御部は、前記上金型及び前記下金型間に対する前記ワークの搬入前又は搬出前において、前記撮像部の撮像範囲に上金型の下端が含まれるように前記バックゲージを移動させるよう構成されている
請求項1に記載の干渉確認システム。
【請求項3】
前記下金型の上端の位置を示す表示を前記撮像画像に対して付加する画像処理部を更に備え、
前記バックゲージ制御部は、前記表示部に表示される前記撮像画像において、前記下金型の上端の位置を示す表示が選択された場合、前記撮像部が前記下金型の上端を水平に撮像可能な位置となるように前記バックゲージを移動させるよう構成されている
請求項1又は2に記載の干渉確認システム。
【請求項4】
前記バックゲージ制御部は、前記上金型及び前記下金型間に対する前記ワークの搬入前又は搬出前において、前記撮像部の撮像範囲に前記上金型の一方側の側辺が含まれるように前記バックゲージを移動させるよう構成されている
請求項1又は2に記載の干渉確認システム。
【請求項5】
前記上金型の一方側の側辺の位置を示す表示を前記撮像画像に対して付加する画像処理部を更に備え、
前記バックゲージ制御部は、前記表示部に表示される前記撮像画像内において、前記上金型の一方側の側辺の位置を示す表示が選択された場合、前記撮像部が前記上金型の一方側の側辺を正面から撮像可能な位置となるように前記バックゲージを移動させるよう構成されている
請求項4に記載の干渉確認システム。
【請求項6】
前記バックゲージは、それぞれ移動可能に構成された第1突き当て部及び第2突き当て部を備え、
前記撮像部は、前記第1突き当て部及び前記第2突き当て部に対してそれぞれ取り付けされており、
前記バックゲージ制御部は、前記上金型及び前記下金型間に対する前記ワークの搬入前又は搬出前において、前記第1突き当て部に取り付けられた第1撮像部の撮像範囲に前記上金型の一方側の側辺が含まれるように前記第1突き当て部を移動させるとともに、前記第2突き当て部に取り付けられた第2撮像部の撮像範囲に前記上金型の他方側の側辺が含まれるように前記第2突き当て部を移動させるよう構成されている
請求項4に記載の干渉確認システム。
【請求項7】
前記表示部は、前記第1撮像部において撮像された第1撮像画像と、前記第2撮像部において撮像された第2撮像画像とを一つの画面に表示可能に構成されている
請求項6に記載の干渉確認システム。
【請求項8】
曲げ加工機の上金型及び下金型間に対するワークの搬入前又は搬出前において、前記曲げ加工機のバックゲージに設けられる撮像部が前記下金型の上端を水平に撮像可能な位置となるように、前記バックゲージを移動させる移動工程と、
前記移動工程後に、前記撮像部により、前記ワークと前記下金型とが干渉するおそれのある作業領域を撮像する撮像工程と、
前記撮像工程により撮像された撮像画像を表示部に表示する表示工程と
を含む干渉確認方法。
【請求項9】
上金型及び下金型と、
前記下金型の後方において移動可能に設けられるバックゲージと、
前記バックゲージに取り付けられる撮像部と、
前記バックゲージの移動を制御する制御部と
を備え、
前記制御部は、前記上金型及び前記下金型間に対するワークの搬入前又は搬出前において、前記撮像部が前記下金型の上端を水平に撮像可能な位置となるように、前記バックゲージを移動させるよう構成されており、
前記撮像部は、撮像した画像を表示部に対して出力するよう構成されている
曲げ加工機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、干渉確認システム、干渉確認方法及び曲げ加工機に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、板状のワークの折り曲げ加工を行う上下の金型と、上下の金型の後方に設けられ、曲げ加工の対象となるワークの位置決めを行うバックゲージとを備える曲げ加工装置が知られている(例えば、特許文献1等)。特許文献1の曲げ加工装置においては、ロボット制御手段によって制御されるロボットが曲げ加工の対象となるワークを曲げ加工装置の上下の金型間に搬入することで曲げ加工を実行し、曲げ加工の実行後においては、該ロボットが曲げ加工が実行されたワークを該上下の金型間から引き抜いて所定の位置へと搬出する。
【先行技術文献】
【特許文献】
【0003】
特開2004-237317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載の曲げ加工装置も含め、自動運転可能なロボットによって曲げ加工の対象となるワークの搬入及び搬出を行う従来の曲げ加工装置では、予めロボットの動作経路を設定することによって、曲げ加工装置に対してワークを搬入及び搬出するよう構成されている。しかしながら、ロボットの搬送対象であるワークが自重により下方に撓んでしまう場合には、予め設定した動作経路では曲げ加工装置の上下の金型間にワークを搬入する際及び上下の金型間から曲げ加工後のワークを搬出する際にワークと下金型とで干渉が発生するおそれがある。
【0005】
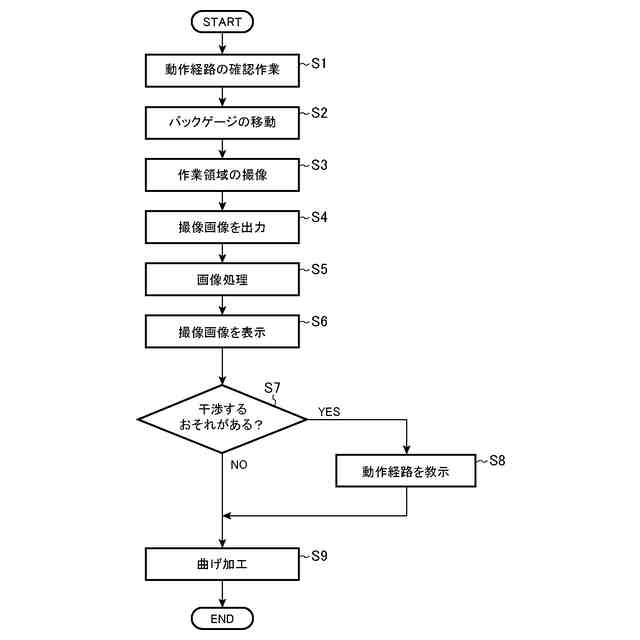
この干渉発生を防止する対策としては、ロボットの制御部に動作経路を教示する段階において、ロボットの動作経路の仮決めを行い、動作経路の確認運転を開始した後に、ワークと下金型との干渉が発生するおそれがある場合には、作業者がロボットの自動運転を停止して曲げ加工の作業領域内へと立ち入り、ワークと下金型とが干渉しない位置を目視にて確認した上でロボットの制御部に対して適格な動作経路を教示するような方法が考えられる。
【0006】
しかしながら、作業者が曲げ加工の作業領域内へと立ち入り、干渉可能性を直接確認する方法では、金型間へとワークを搬入する際及び金型間からワークを搬出する際の双方においてロボットの自動運転を止め、曲げ加工の作業領域内へと立ち入った後に、作業者が干渉確認を行い、その後、ロボットの制御部に対して動作経路を教示するという一連の作業が必要となるため、作業者の作業負担が増大するおそれがある。
【0007】
本発明の一態様は、ワークと下金型との干渉確認を容易に行うことが可能な干渉確認システム、干渉確認方法及び曲げ加工装置に関する。
【課題を解決するための手段】
【0008】
本発明の一態様に係る干渉確認システムは、上金型と、下金型と、前記下金型の後方において移動可能に設けられるバックゲージと、前記バックゲージに取り付けられる撮像部とを備える曲げ加工機と、ワークを前記上金型及び前記下金型間に搬送可能に構成されるワーク保持ロボットと、前記曲げ加工機及び前記ワーク保持ロボットを制御する制御部と、前記撮像部により撮像された撮像画像を表示する表示部とを備え、前記制御部は、前記バックゲージの移動を制御するバックゲージ制御部を有しており、前記バックゲージ制御部は、前記上金型及び前記下金型間に対する前記ワークの搬入前又は搬出前において、前記撮像部が前記下金型の上端を水平に撮像可能な位置となるように前記バックゲージを移動させるよう構成されている。
【0009】
また、本発明の一態様に係る干渉確認方法は、曲げ加工機の上金型及び下金型間に対するワークの搬入前又は搬出前において、前記曲げ加工機のバックゲージに設けられる撮像部が前記下金型の上端を水平に撮像可能な位置となるように、前記バックゲージを移動させる移動工程と、前記移動工程後に、前記撮像部により、前記ワークと前記下金型とが干渉するおそれのある作業領域を撮像する撮像工程と、前記撮像工程により撮像された撮像画像を表示部に表示する表示工程とを備える。
【0010】
さらに、本発明の一態様に係る曲げ加工機は、上金型及び下金型と、前記下金型の後方において移動可能に設けられるバックゲージと、前記バックゲージに取り付けられる撮像部と、前記バックゲージの移動を制御する制御部とを備え、前記制御部は、前記上金型及び前記下金型間に対するワークの搬入前又は搬出前において、前記撮像部が前記下金型の上端を水平に撮像可能な位置となるように、前記バックゲージを移動させるよう構成されており、前記撮像部は、撮像した画像を表示部に対して出力するよう構成されている。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アマダ
無人搬送車
1か月前
株式会社アマダ
レーザ発振器
2か月前
株式会社アマダ
ビード形成方法
28日前
株式会社アマダ
工作機械制御装置
1か月前
株式会社アマダ
見積り作成システム
1か月前
株式会社アマダ
金型管理装置及び加工機制御装置
1か月前
株式会社アマダ
曲げ加工システム及びロボット搬送体
今日
株式会社アマダ
加工システム及び加工性判定システム
1か月前
株式会社アマダ
ガルバノスキャナユニット及びレーザ加工機
20日前
株式会社アマダ
プレスブレーキ制御装置及び曲げ速度算出方法
1か月前
株式会社アマダ
干渉確認システム、干渉確認方法及び曲げ加工機
21日前
株式会社アマダ
プレスブレーキ及びプレスブレーキの金型位置決め方法
1か月前
株式会社アマダ
生産管理システム、生産管理方法及び生産管理プログラム
1か月前
株式会社アマダ
タレットパンチプレス及びタレットパンチプレスの制御方法
1か月前
株式会社アマダ
制御装置、溶接加工システム、教示点判定方法及び教示点判定プログラム
21日前
株式会社アマダ
制御装置、曲げ加工システム、ロボット制御方法及びロボット制御プログラム
今日
株式会社アマダ
制御装置、曲げ加工システム、制御プログラム作成方法及び制御プログラム作成プログラム
今日
株式会社アマダ
生産管理システム、生産シミュレーション装置、生産シミュレーション方法及び生産シミュレーションプログラム
1か月前
個人
鋼線の連続伸線方法
12日前
個人
ヘッダー加工機
5か月前
株式会社不二越
NC転造盤
4か月前
日伸工業株式会社
プレス加工装置
5か月前
日東精工株式会社
中空軸部品の製造方法
5か月前
オムロン株式会社
導線折り曲げ治具
3か月前
トヨタ紡織株式会社
プレス金型
5か月前
トヨタ紡織株式会社
プレス金型
7か月前
株式会社西田製作所
パンチャーヘッド
6か月前
トヨタ紡織株式会社
プレス装置
6か月前
トヨタ紡織株式会社
プレス金型
2か月前
工機ホールディングス株式会社
ニブラ
6か月前
株式会社アマダ
曲げ金型
2か月前
東栄工業株式会社
ダブルデッキヘミング金型
4か月前
株式会社TMEIC
監視装置
7か月前
トヨタ自動車株式会社
打ち抜き加工装置
1か月前
日鉄建材株式会社
成形装置
1か月前
株式会社アマダ
曲げ加工機
5か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ