TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165481
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2024069533
出願日
2024-04-23
発明の名称
制御装置、溶接加工システム、教示点判定方法及び教示点判定プログラム
出願人
株式会社アマダ
代理人
弁理士法人きさらぎ国際特許事務所
主分類
B25J
9/22 20060101AFI20251028BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】危険な教示点が溶接加工プログラムに登録されることを防止できる制御装置、溶接加工システム、教示点判定方法及び教示点判定プログラム。
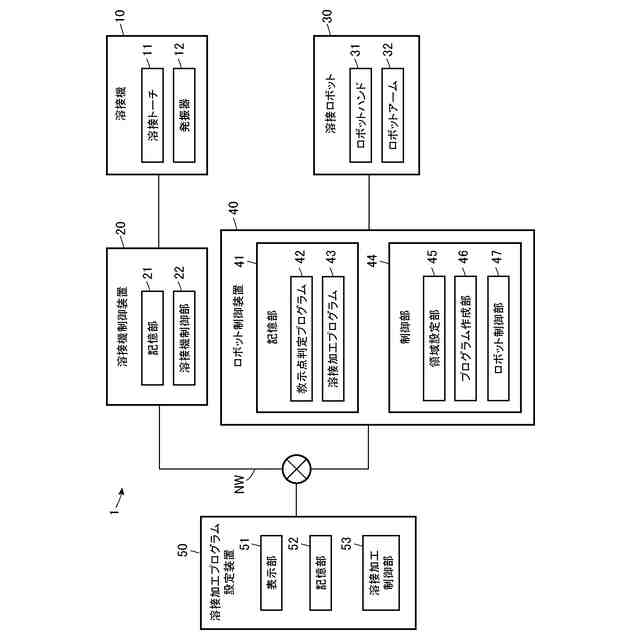
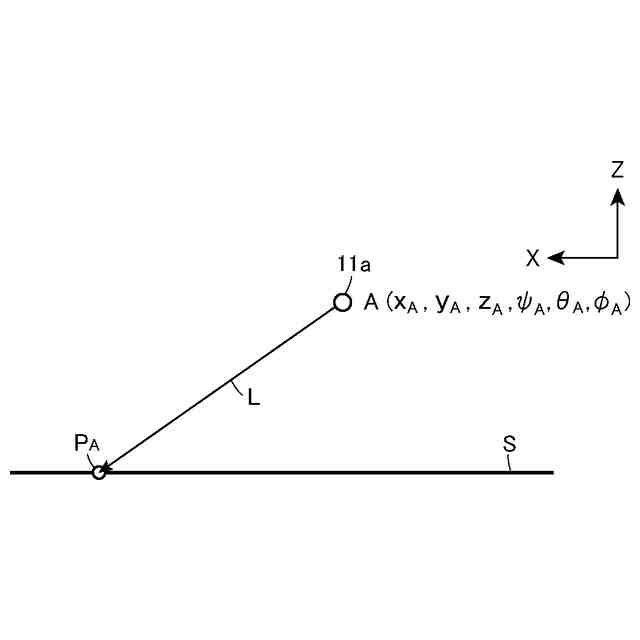
【解決手段】ワークにレーザ光を照射可能な溶接トーチを保持する溶接ロボットの教示点を溶接加工プログラムに登録可能な制御部を備え、前記制御部は、ユーザにより指定された前記教示点の候補を受け付ける教示点候補受付処理と、前記ワークが載置される載置面と、受け付けた教示点候補で前記レーザ光を照射した場合の前記レーザ光の軌跡とが交わるか否かを判定する平面交差判定処理と、前記平面交差判定処理において、前記載置面と前記軌跡とが交わると判定した場合、前記教示点候補を前記溶接ロボットの前記教示点として前記溶接加工プログラムに登録する教示点登録処理とを実行可能に構成されている。
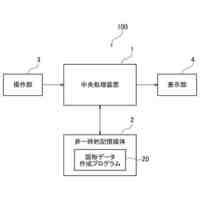
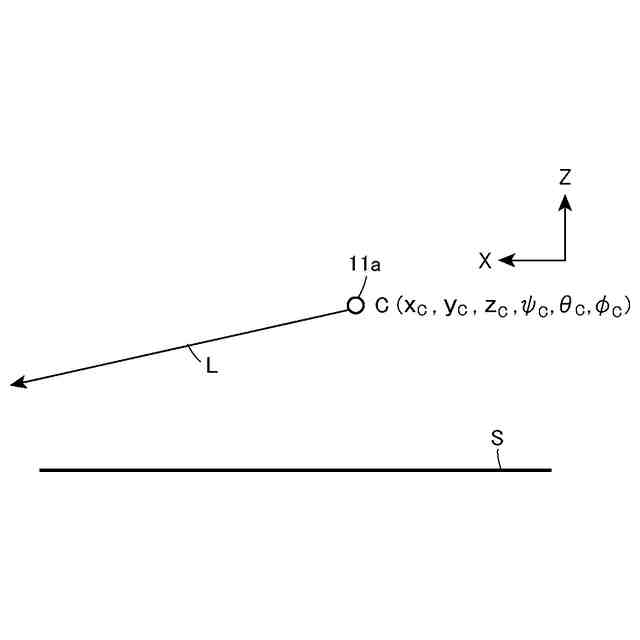
【選択図】図1
特許請求の範囲
【請求項1】
ワークにレーザ光を照射可能な溶接トーチを保持する溶接ロボットの教示点を溶接加工プログラムに登録可能な制御部を備え、
前記制御部は、
ユーザにより指定された前記教示点の候補を受け付ける教示点候補受付処理と、
前記ワークが載置される載置面と、受け付けた教示点候補で前記レーザ光を照射した場合の前記レーザ光の軌跡とが交わるか否かを判定する平面交差判定処理と、
前記平面交差判定処理において、前記載置面と前記軌跡とが交わると判定した場合、前記教示点候補を前記溶接ロボットの前記教示点として前記溶接加工プログラムに登録する教示点登録処理と
を実行可能に構成されている
制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記教示点及び前記教示点候補は、前記載置面の上方空間における前記溶接トーチの位置及び姿勢に関する情報を含む
請求項1に記載の制御装置。
【請求項3】
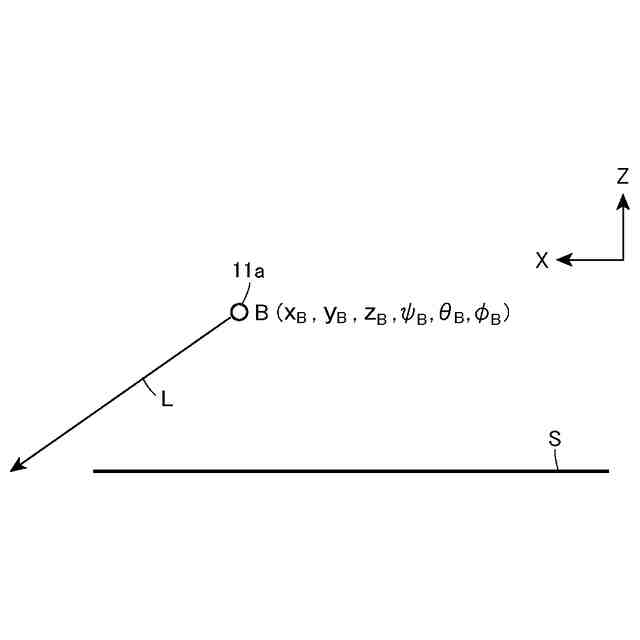
前記制御部は、前記載置面と前記軌跡が交わらないと判定した場合、前記教示点候補を前記溶接加工プログラムに登録しない不登録処理又は、前記ユーザに対して警告を表示する警告表示処理を実行可能に構成されている
請求項2に記載の制御装置。
【請求項4】
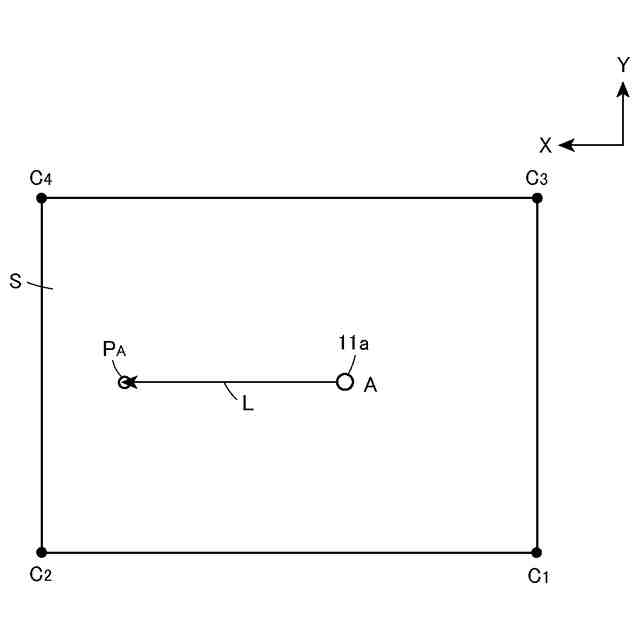
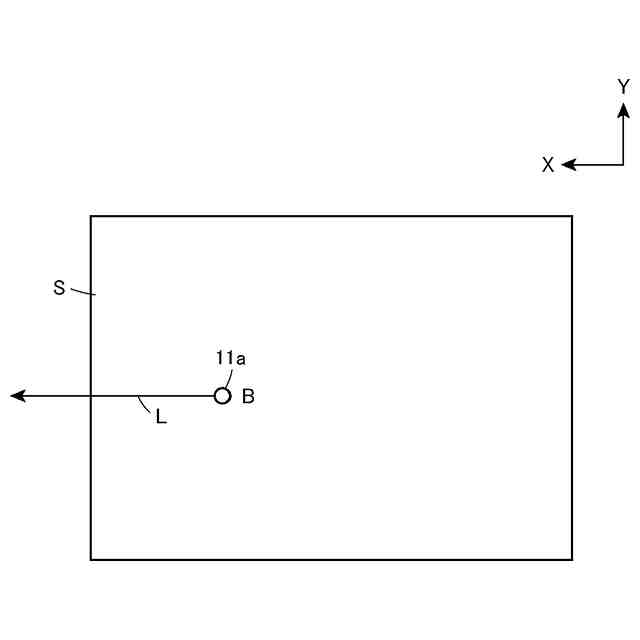
前記制御部は、前記教示点候補における前記溶接トーチの前記レーザ光を出射する先端部の位置が平面視において前記載置面内に位置している否かを判定する領域内判定処理を実行可能に構成されている
請求項3に記載の制御装置。
【請求項5】
前記制御部は、前記教示点候補における前記先端部の位置が前記載置面内に位置していると判定した場合、前記平面交差判定処理を実行するように構成されている
請求項4に記載の制御装置。
【請求項6】
前記制御部は、前記載置面と前記軌跡が交わらない前記教示点候補のうち、所定の安全条件を満たす例外教示点候補を前記溶接加工プログラムに登録するように構成されている
請求項1又は2に記載の制御装置。
【請求項7】
前記制御部は、
前記載置面の少なくとも上方空間に向けて延びる仮想的な側方領域の範囲を設定する側方領域設定処理と、
前記軌跡が前記側方領域と交わるか否かを判定する側方交差判定処理と、
前記平面交差判定処理において前記載置面と前記軌跡が交わらないと判定し、かつ、前記側方交差判定処理において前記軌跡と前記側方領域が交わらないと判定した場合、前記教示点候補を前記例外教示点候補と判定して前記溶接加工プログラムに登録する例外教示点登録処理と
を実行可能に構成されており、
前記側方領域は、所定の高さを有する
請求項6に記載の制御装置。
【請求項8】
前記側方領域は、前記載置面の全周に亘って設定されている
請求項7に記載の制御装置。
【請求項9】
前記制御部は、前記載置面と前記軌跡が交わらないと判定した前記教示点候補が前記安全条件を満たさない場合、前記教示点候補を前記溶接加工プログラムに登録しない不登録処理又は、前記ユーザに対して警告を表示する警告表示処理を実行可能に構成されている
請求項7に記載の制御装置。
【請求項10】
ワークにレーザ光を照射可能な溶接トーチと、
前記溶接トーチを保持する溶接ロボットと、
前記溶接ロボットの教示点を溶接加工プログラムに登録可能な制御部を含む制御装置と
を備え、
前記制御部は、
ユーザにより指定された前記教示点の候補を受け付ける教示点候補受付処理と、
前記ワークが載置される載置面と、受け付けた教示点候補で前記レーザ光を照射した場合の前記レーザ光の軌跡とが交わるか否かを判定する平面交差判定処理と、
前記平面交差判定処理において、前記載置面と前記軌跡とが交わると判定した場合、前記教示点候補を前記溶接ロボットの前記教示点として前記溶接加工プログラムに登録する教示点登録処理と
を実行可能に構成されている
溶接加工システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、溶接加工システム、教示点判定方法及び教示点判定プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、ソフトウェア処理能力を有するロボット制御装置によって制御されるレーザロボットがある(特許文献1等)。特許文献1のレーザロボットは、加工用のレーザビームと照準用のレーザビームを選択的に出射するレーザツールを搭載している。特許文献1のレーザロボットは、加工用のレーザビームを用いてワークに対する切断、溶接等の加工を行なうことができる。また、特許文献1のレーザロボットは、照準用のレーザビームを利用して、加工プログラム用のデータを教示することができる。
【0003】
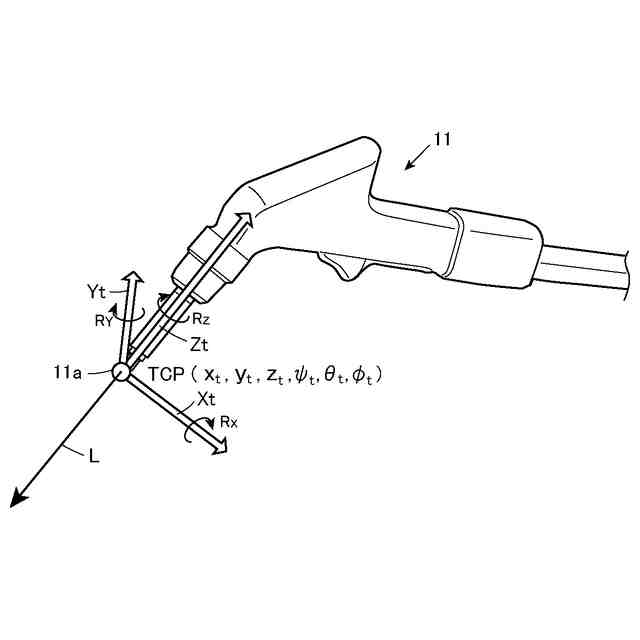
具体的には、まず、教示に先だって加工対象ワーク面に関連させた姿勢を有する座標系が設定される。そして、特許文献1のレーザロボットは、レーザロボットのジョグ送り操作によって照準用のレーザビームの照射点を希望する加工点に一致させることで、ワーク上の実際のレーザビームの照射点との対応を視認しながらレーザロボットの教示点を定めることができる。この教示点には、レーザロボットやレーザツールの位置及び姿勢に関する情報が含まれている。
【先行技術文献】
【特許文献】
【0004】
特開平8-211921号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のレーザロボットを含む従来のレーザロボットでは、ユーザが任意の教示点を定めることができるため、ユーザにレーザビームが当たる危険性がある教示点も加工プログラム用のデータに教示できてしまうという問題がある。
【0006】
上記の問題を解決するために、レーザツールとワークが接触している状態、又は、レーザツールとワークの距離が至近距離の場合のみレーザビームを出射する教示点を定めることができるようにすることも考えられる。しかしながら、このような条件が課された仕様であっても、ワークが薄板である場合や隙間のある構造である場合には、レーザビームがワークを貫通し、ユーザに当たる危険性がある。
【0007】
本発明の一態様は、危険な教示点が溶接加工プログラムに登録されることを防止できる制御装置、溶接加工システム、教示点判定方法及び教示点判定プログラムである。
【課題を解決するための手段】
【0008】
本発明の一態様に係る制御装置は、ワークにレーザ光を照射可能な溶接トーチを保持する溶接ロボットの教示点を溶接加工プログラムに登録可能な制御部を備え、前記制御部は、ユーザにより指定された前記教示点の候補を受け付ける教示点候補受付処理と、前記ワークが載置される載置面と、受け付けた教示点候補で前記レーザ光を照射した場合の前記レーザ光の軌跡とが交わるか否かを判定する平面交差判定処理と、前記平面交差判定処理において、前記載置面と前記軌跡とが交わると判定した場合、前記教示点候補を前記溶接ロボットの前記教示点として前記溶接加工プログラムに登録する教示点登録処理とを実行可能に構成されている。
【0009】
本発明の一態様に係る溶接加工システムは、ワークにレーザ光を照射可能な溶接トーチと、前記溶接トーチを保持する溶接ロボットと、前記溶接ロボットの教示点を溶接加工プログラムに登録可能な制御部を含む制御装置とを備え、前記制御部は、ユーザにより指定された前記教示点の候補を受け付ける教示点候補受付処理と、前記ワークが載置される載置面と、受け付けた教示点候補で前記レーザ光を照射した場合の前記レーザ光の軌跡とが交わるか否かを判定する平面交差判定処理と、前記平面交差判定処理において、前記載置面と前記軌跡とが交わると判定した場合、前記教示点候補を前記溶接ロボットの前記教示点として前記溶接加工プログラムに登録する教示点登録処理とを実行可能に構成されている。
【0010】
本発明の一態様に係る教示点判定方法は、ユーザにより指定されたワークにレーザ光を照射可能な溶接トーチを保持する溶接ロボットの教示点の候補を受け付ける教示点候補受付工程と、前記ワークが載置される載置面と、受け付けた教示点候補で前記レーザ光を照射した場合の前記レーザ光の軌跡とが交わるか否かを判定する平面交差判定工程と、前記平面交差判定工程において、前記載置面と前記軌跡とが交わると判定した場合、前記教示点候補を前記溶接ロボットの前記教示点として溶接加工プログラムに登録する教示点登録工程とを制御装置が実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アマダ
無人搬送車
1か月前
株式会社アマダ
ビード形成方法
1か月前
株式会社アマダ
工作機械制御装置
1か月前
株式会社アマダ
見積り作成システム
1か月前
株式会社アマダ
金型管理装置及び加工機制御装置
1か月前
株式会社アマダ
加工システム及び加工性判定システム
1か月前
株式会社アマダ
曲げ加工システム及びロボット搬送体
5日前
株式会社アマダ
ガルバノスキャナユニット及びレーザ加工機
25日前
株式会社アマダ
プレスブレーキ制御装置及び曲げ速度算出方法
2か月前
株式会社アマダ
干渉確認システム、干渉確認方法及び曲げ加工機
26日前
株式会社アマダ
プレスブレーキ及びプレスブレーキの金型位置決め方法
1か月前
株式会社アマダ
生産管理システム、生産管理方法及び生産管理プログラム
1か月前
株式会社アマダ
制御装置、溶接加工システム、教示点判定方法及び教示点判定プログラム
26日前
株式会社アマダ
図形データ作成装置、図形データ作成方法、及び図形データ作成プログラム
3日前
株式会社アマダ
制御装置、曲げ加工システム、ロボット制御方法及びロボット制御プログラム
5日前
株式会社アマダ
制御装置、曲げ加工システム、制御プログラム作成方法及び制御プログラム作成プログラム
5日前
株式会社アマダ
生産管理システム、生産シミュレーション装置、生産シミュレーション方法及び生産シミュレーションプログラム
1か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
26日前
川崎重工業株式会社
ロボット
2か月前
株式会社不二越
ロボット
2か月前
株式会社竹中工務店
補助セット
2か月前
トヨタ自動車株式会社
学習装置
11日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
トヨタ自動車株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
瓜生製作株式会社
電動締付工具
4日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
1か月前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社不二越
垂直多関節ロボット
11日前
株式会社三共コーポレーション
工具保持具
26日前
株式会社マキタ
集塵アタッチメント
3日前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ