TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025167103
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024071402
出願日
2024-04-25
発明の名称
船舶を制御するためのシステムおよび方法
出願人
ヤマハ発動機株式会社
代理人
弁理士法人新樹グローバル・アイピー
,
個人
主分類
B63H
25/04 20060101AFI20251030BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】衛星測位センサによる衛星からの電波の受信が一時的に途切れても、自動航行を継続する。
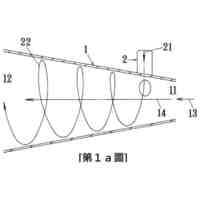
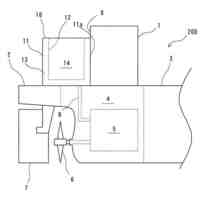
【解決手段】システムは、衛星測位センサ11とリモートセンサ14とコントローラ10とを備える。衛星測位センサ11は、衛星測位システムの衛星からの電波により、船舶の位置を検出する。リモートセンサ14は、船舶の進行方向に位置する目標物の船舶に対する位置を検出する。コントローラ10は、衛星測位センサ11が衛星からの電波を受信している場合には、衛星測位センサ11が検出した船舶の位置を取得し、船舶の位置に基づいて船舶を所定の航路に従って移動させる通常自動航行を行う。コントローラ10は、船舶の航行中にリモートセンサ14が検出した目標物の位置を取得する。コントローラ10は、衛星測位センサ11において衛星からの電波の受信が途切れた場合には、船舶が目標物に向かって移動するように船舶を制御する臨時自動航行を行う。
【選択図】図7
特許請求の範囲
【請求項1】
船舶を制御するためのシステムであって、
前記船舶に搭載され、衛星測位システムの衛星からの電波により、前記船舶の位置を検出する衛星測位センサと、
前記船舶に搭載され、前記船舶の進行方向に位置する目標物の前記船舶に対する位置を検出するリモートセンサと、
コントローラと、
を備え、
前記コントローラは、
前記衛星測位センサが前記衛星からの電波を受信している場合には、前記衛星測位センサが検出した前記船舶の位置を取得し、前記船舶の位置に基づいて前記船舶を所定の航路に従って移動させる通常自動航行を行い、
前記船舶の航行中に前記リモートセンサが検出した前記目標物の位置を取得し、
前記衛星測位センサにおいて前記衛星からの電波の受信が途切れた場合には、前記船舶が前記目標物に向かって移動するように前記船舶を制御する臨時自動航行を行う、
システム。
続きを表示(約 1,400 文字)
【請求項2】
前記コントローラは、前記衛星測位センサが前記衛星からの電波を受信している間に、前記船舶の進行方向において所定距離先に位置する物体の位置を継続的に検出し、継続的に検出される前記物体の位置を、前記目標物の位置として更新する、
請求項1に記載のシステム。
【請求項3】
前記コントローラは、
前記衛星測位センサにおいて前記衛星からの電波の受信が再開したかを判定し、
前記衛星測位センサにおいて前記衛星からの電波の受信が再開した場合には、前記船舶を前記通常自動航行に復帰させる、
請求項1に記載のシステム。
【請求項4】
前記コントローラは、
前記衛星測位センサにおいて前記衛星からの電波の受信が途切れてから再開するまでの継続時間をカウントし、
前記継続時間が閾値以上となった場合には、前記船舶を停止させる、
請求項1に記載のシステム。
【請求項5】
前記コントローラは、前記衛星測位センサにおいて前記衛星からの電波の受信が途切れた後、再開するまでに、前記船舶が前記目標物から所定距離、手前の位置に到達した場合には、前記船舶を停止させる、
請求項1に記載のシステム。
【請求項6】
前記コントローラは、
前記衛星からの電波が届かないエリアを記憶しており、
前記船舶が前記エリア内に入った場合に、前記臨時自動航行を行う、
請求項1に記載のシステム。
【請求項7】
前記船舶は、無人で自動航行する船舶である、
請求項1に記載のシステム。
【請求項8】
船舶を制御するための方法であって、前記船舶は、衛星測位システムの衛星からの電波により前記船舶の位置を検出する衛星測位センサと、前記船舶の進行方向に位置する目標物の前記船舶に対する位置を検出するリモートセンサとを含み、前記方法は、
前記衛星測位センサが検出した前記船舶の位置を取得することと、
前記衛星測位センサが前記衛星からの電波を受信している場合には、前記衛星測位センサが検出した前記船舶の位置に基づいて、前記船舶を所定の航路に従って移動させる通常自動航行を行うことと、
前記船舶の航行中に前記リモートセンサが検出した前記目標物の位置を取得することと、
前記衛星測位センサにおいて前記衛星からの電波の受信が途切れた場合には、前記船舶が前記目標物に向かって移動するように前記船舶を制御する臨時自動航行を行うこと、
を備える方法。
【請求項9】
前記衛星測位センサが前記衛星からの電波を受信している間に、前記船舶の進行方向において所定距離先に位置する物体の位置を継続的に検出し、継続的に検出される前記物体の位置を、前記目標物の位置として更新すること、
を備える請求項8に記載の方法。
【請求項10】
前記衛星測位センサにおいて前記衛星からの電波の受信が再開したかを判定することと、
前記衛星測位センサにおいて前記衛星からの電波の受信が再開した場合には、前記船舶を前記通常自動航行に復帰させること、
を備える請求項8に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶を制御するためのシステムおよび方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、船舶を所定の航路に沿って自動で移動させる自動航行の技術が知られている。この自動航行の技術では、例えば特許文献1に示されているように、船舶は、GPSなどの衛星測位システムの衛星測位センサを備えている。衛星測位センサは、衛星からの電波により、船舶の位置を検出する。船舶のコントローラは、衛星測位センサが検出した船舶の位置に基づいて、船舶を所定の航路に沿って自動で移動させる。
【先行技術文献】
【特許文献】
【0003】
特開2022-060044号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
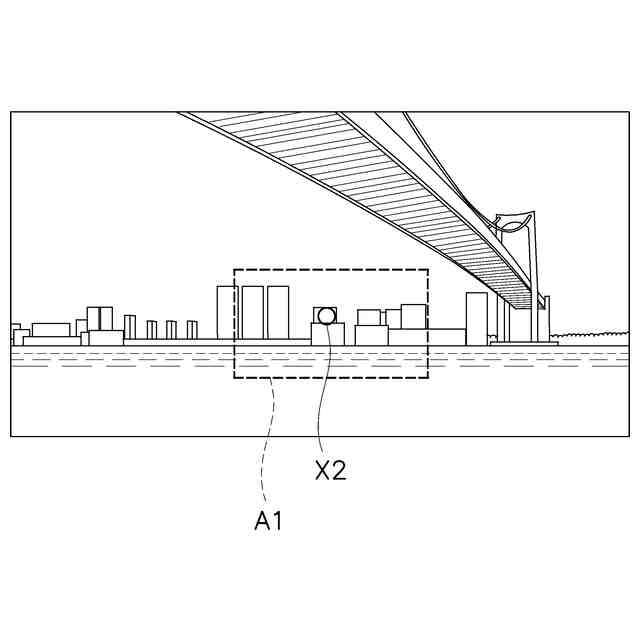
例えば、船舶が橋などの建造物の下をくぐる場合、衛星測位センサによる衛星からの電波の受信が一時的に途切れることがある。その場合、上述した技術では、自動航行を続けることは困難である。本発明の目的は、衛星測位センサによる衛星からの電波の受信が一時的に途切れても、自動航行を継続することにある。
【課題を解決するための手段】
【0005】
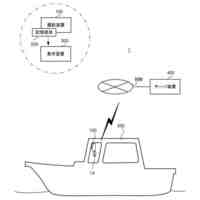
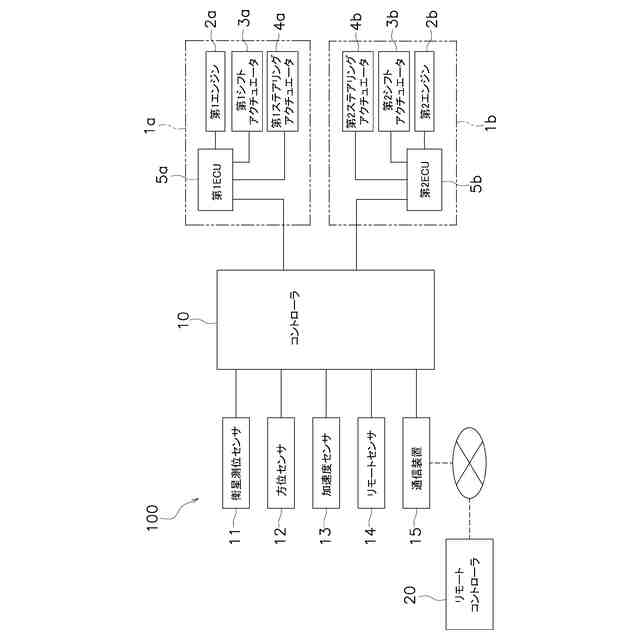
本発明の一態様に係るシステムは、船舶を制御するためのシステムである。本態様に係るシステムは、衛星測位センサと、リモートセンサと、コントローラとを備える。衛星測位センサは、船舶に搭載され、衛星測位システムの衛星からの電波により、船舶の位置を検出する。リモートセンサは、船舶に搭載され、船舶の進行方向に位置する目標物の船舶に対する位置を検出する。コントローラは、衛星測位センサが衛星からの電波を受信している場合には、衛星測位センサが検出した船舶の位置を取得し、船舶の位置に基づいて船舶を所定の航路に従って移動させる通常自動航行を行う。コントローラは、船舶の航行中にリモートセンサが検出した目標物の位置を取得する。コントローラは、衛星測位センサにおいて衛星からの電波の受信が途切れた場合には、船舶が目標物に向かって移動するように船舶を制御する臨時自動航行を行う。
【0006】
本発明の他の態様に係る方法は、船舶を制御するための方法である。船舶は、衛星測位センサとリモートセンサとを含む。衛星測位センサは、衛星測位システムの衛星からの電波により船舶の位置を検出する。リモートセンサは、船舶の進行方向に位置する目標物の船舶に対する位置を検出する。本態様に係る方法は、衛星測位センサが検出した船舶の位置を取得することと、衛星測位センサが衛星からの電波を受信している場合には、衛星測位センサが検出した船舶の位置に基づいて、船舶を所定の航路に従って移動させる通常自動航行を行うことと、船舶の航行中にリモートセンサが検出した目標物の位置を取得することと、衛星測位センサにおいて衛星からの電波の受信が途切れた場合には、船舶が目標物に向かって移動するように船舶を制御する臨時自動航行を行うこと、を備える。
【発明の効果】
【0007】
本発明によれば、衛星測位センサにおいて衛星からの電波の受信が途切れた場合には、リモートセンサによって検出された目標物に向かって船舶が移動するように船舶が制御される。それにより、衛星測位センサによる衛星からの電波の受信が一時的に途切れても、自動航行を継続することができる。
【図面の簡単な説明】
【0008】
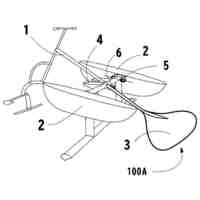
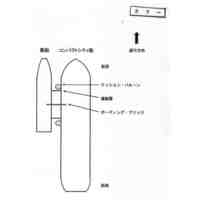
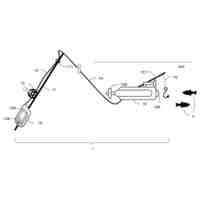
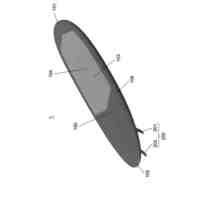
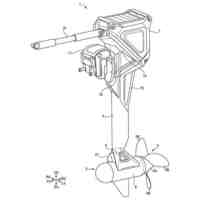
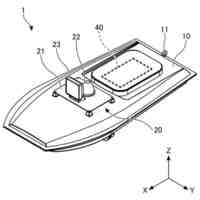
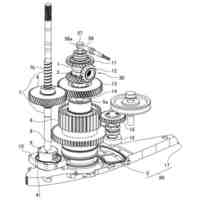
実施形態に係るシステムが搭載された船舶の斜視図である。
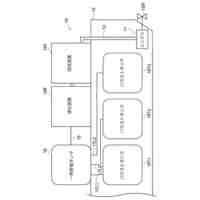
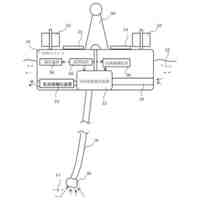
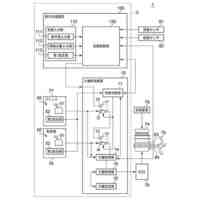
システムの構成を示すブロック図である。
自動航行制御における航路の一例を示す図である。
自動航行制御の処理を示すフローチャートである。
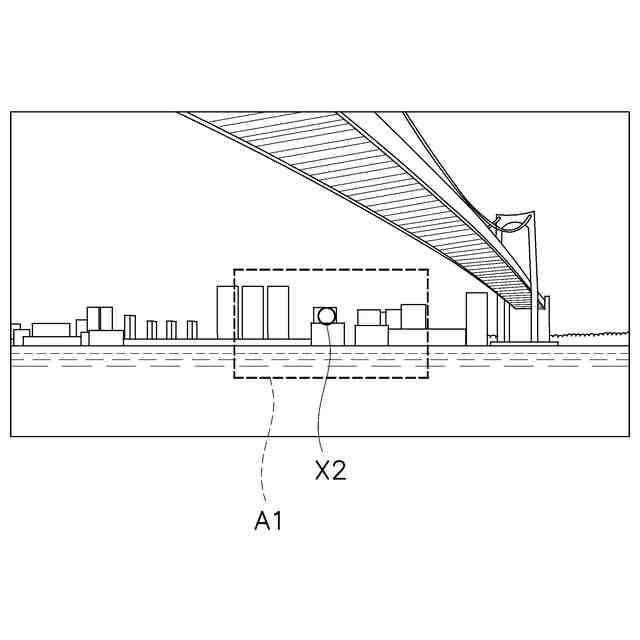
リモートセンサによって検出された目標物の一例を示す図である。
自動航行制御における航路の一例を示す図である。
リモートセンサによって検出された目標物の一例を示す図である。
【発明を実施するための形態】
【0009】
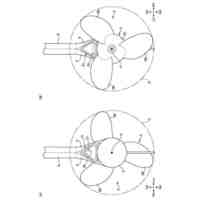
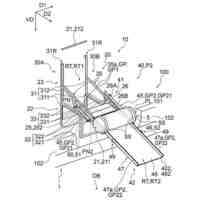
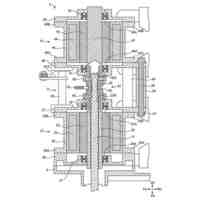
以下、図面を参照して実施形態にかかる船舶を制御するためのシステムについて説明する。図1は、実施形態に係るシステム100が搭載された船舶101の斜視図である。システム100は、船舶101を無人で自動航行させる。システム100は、第1船舶推進器1aと第2船舶推進器1bとを備えている。第1、第2船舶推進器1a,1bは、船外機である。第1、第2船舶推進器1a,1bは、それぞれ船舶101を推進させるスラストを発生させる。
【0010】
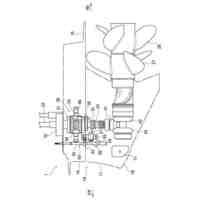
図2は、システム100の構成を示すブロック図である。図2に示すように、第1船舶推進器1aは、第1エンジン2aと、第1シフトアクチュエータ3aと、第1ステアリングアクチュエータ4aと、第1ECU5aとを備える。第1エンジン2aは、船舶101を推進させるスラストを発生させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
水上遊具
6か月前
個人
洋上研究所
4か月前
個人
補助機構
8か月前
個人
津波防災ウエア
3か月前
個人
船用横揺防止具
9か月前
個人
コンパクトシティ船
8か月前
個人
渦流動力推進構造
8か月前
石田造船株式会社
内航船
23日前
個人
セールのバテンガイド装置
4か月前
個人
水質浄化・集熱昇温システム
5か月前
炎重工株式会社
浮標
10か月前
炎重工株式会社
浮標
10か月前
住友重機械工業株式会社
船舶
5か月前
株式会社フルトン
水中捕捉装置
8か月前
個人
船舶
10か月前
株式会社ラフティ
サーフボード
5か月前
個人
スクリュープロペラ
8か月前
オーケー工業株式会社
係留フック
9か月前
ペアリ株式会社
海の環境改善装置
1か月前
個人
回転式による流体流出防止タンカー
8か月前
ヤマハ発動機株式会社
船外機
10か月前
スズキ株式会社
船外機
8か月前
スズキ株式会社
船外機
7か月前
スズキ株式会社
船外機
8か月前
スズキ株式会社
船外機
7か月前
株式会社アカデミー出版
船舶
4か月前
常石造船株式会社
メタノール燃料船
11か月前
朝日電装株式会社
船外機用照明装置
3か月前
藤倉コンポジット株式会社
架台
11か月前
ナブテスコ株式会社
主機制御システム
2か月前
炎重工株式会社
自律航行浮遊体
10か月前
株式会社ユピテル
システム及びプログラム等
7か月前
ヤマハ発動機株式会社
船舶推進機
1か月前
スズキ株式会社
船舶推進機
6か月前
ヤマハ発動機株式会社
船舶推進機
1か月前
ヤマハ発動機株式会社
船舶推進機
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ