TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025166838
公報種別
公開特許公報(A)
公開日
2025-11-06
出願番号
2025132250,2023192616
出願日
2025-08-07,2019-07-19
発明の名称
構造体の制振システム
出願人
株式会社大林組
代理人
弁理士法人一色国際特許事務所
主分類
F16F
15/02 20060101AFI20251029BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】制振性能の向上を図る。
【解決手段】支持端と、前記支持端と所定方向に並ぶ第1質点と、前記支持端と前記第1質点を結ぶ第1バネ要素であって、前記所定方向と直交する直交方向に沿って作用する弾性反力を発生する第1バネ要素と、前記第1質点に対して前記直交方向に相対変位可能な第2質点と、前記第1質点に接続され、前記第2質点を前記直交方向に加振する加振器と、を有する質点モデルで表現される構造体の制振システムであって、前記加振器の加振力を制御する制御則を、強化学習を用いて定めた。
【選択図】図4
特許請求の範囲
【請求項1】
支持端と、
前記支持端と所定方向に並ぶ第1質点と、
前記支持端と前記第1質点を結ぶ第1バネ要素であって、前記所定方向と直交する直交方向に沿って作用する弾性反力を発生する第1バネ要素と、
前記第1質点に対して前記直交方向に相対変位可能な第2質点と、
前記第1質点に接続され、前記第2質点を前記直交方向に加振する加振器と、
を有する質点モデルで表現される構造体の制振システムであって、
前記加振器の加振力を制御する制御則を、強化学習を用いて定め、
前記第2質点を前記第1質点の振動を抑制するマスダンパーのマスとし、
前記強化学習は、ある環境におかれたエージェントが、環境との相互作用を通じて、最適な行動規則を獲得するための枠組みであり、学習波を入力とする質点モデルのシミュレーションを複数回繰り返し行う、
ことを特徴とする構造体の制振システム。
続きを表示(約 91 文字)
【請求項2】
請求項1に記載の構造体の制振システムであって、
前記強化学習の学習対象がセミアクティブである、
ことを特徴とする構造体の制振システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、構造体の制振システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
各種外乱に起因する建築物の水平振動や、床の上下振動など、構造体の振動を低減させる手法として、質量体(マス)を能動的に動かすことによって制振するAMD(Active Mass Damper)が知られている(例えば、特許文献1参照)。AMDでは、一般的に、制御工学に基づく制御則に従って制御を行っている。
【先行技術文献】
【特許文献】
【0003】
特開平1-275867号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
制御工学に基づく制御則では、制御理論が必要であり、AMDの能力を最大限に発揮させること(すなわち、マスを最適に動かすこと)が困難であった。
【0005】
本発明は、かかる課題に鑑みてなされたものであって、その目的とするところは、制振性能の向上を図ることにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための主たる発明は、支持端と、前記支持端と所定方向に並ぶ第1質点と、前記支持端と前記第1質点を結ぶ第1バネ要素であって、前記所定方向と直交する直交方向に沿って作用する弾性反力を発生する第1バネ要素と、前記第1質点に対して前記直交方向に相対変位可能な第2質点と、前記第1質点に接続され、前記第2質点を前記直交方向に加振する加振器と、を有する質点モデルで表現される構造体の制振システムであって、前記加振器の加振力を制御する制御則を、強化学習を用いて定め、前記第2質点を前記第1質点の振動を抑制するマスダンパーのマスとし、前記強化学習は、ある環境におかれたエージェントが、環境との相互作用を通じて、最適な行動規則を獲得するための枠組みであり、学習波を入力とする質点モデルのシミュレーションを複数回繰り返し行う、ことを特徴とする。
本発明の他の特徴については、本明細書及び添付図面の記載により明らかにする。
【発明の効果】
【0007】
本発明によれば、制振性能の向上を図ることができる。
【図面の簡単な説明】
【0008】
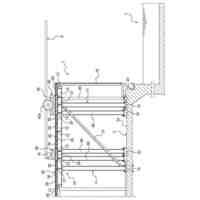
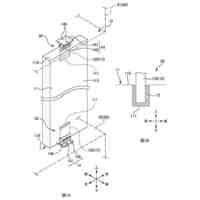
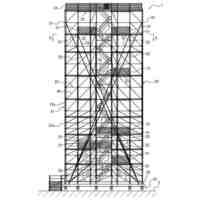
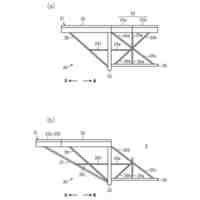
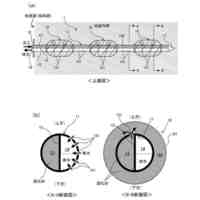
図1Aは、第1実施形態に係る構造体の制振システム構成を示す図である。図1Bは、図1Aをモデル化した図である。図1Cは、図1Bの等価図である。
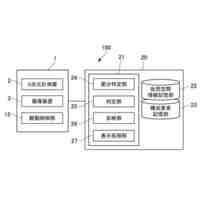
アクチュエータ40の制御部分の構成を示すブロック図である。
比較例におけるAMD制御システム構築のフロー図である。
本実施形態におけるAMD制御システム構築のフロー図である。
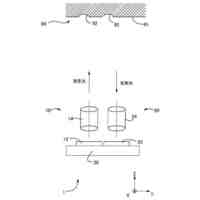
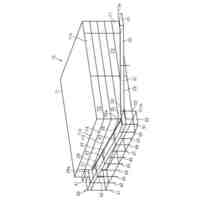
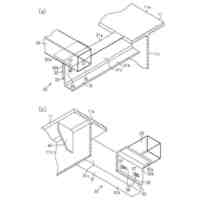
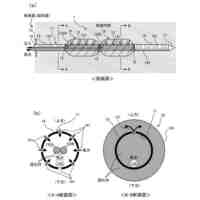
図5Aは、第2実施形態に係る構造体の制振システム構成を示す図である。図5Bは図5Aをモデル化した図である。
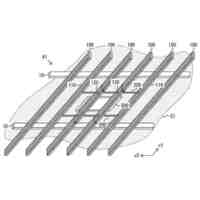
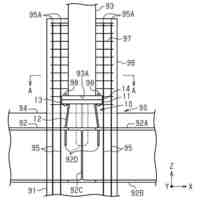
図6Aは、第3実施形態に係る構造体の制振システム構成を示す図である。図6Bは図6Aをモデル化した図である。
第3実施形態の変形例を示す図である。
第3実施形態の別の変形例を示す図である。
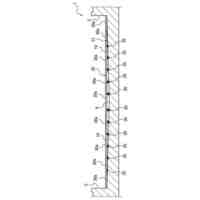
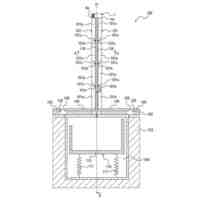
図9Aは、第4実施形態に係る構造体の制振システム構成を示すである。図9Bは図9Aをモデル化した図である。
第4実施形態の変形例を示す図である。
第4実施形態の別の変形例を示す図である。
【発明を実施するための形態】
【0009】
本明細書及び添付図面の記載により、少なくとも以下の事項が明らかとなる。
【0010】
支持端と、前記支持端と所定方向に並ぶ第1質点と、前記支持端と前記第1質点を結ぶ第1バネ要素であって、前記所定方向と直交する直交方向に沿って作用する弾性反力を発生する第1バネ要素と、前記第1質点に対して前記直交方向に相対変位可能な第2質点と、前記第1質点に接続され、前記第2質点を前記直交方向に加振する加振器と、を有する質点モデルで表現される構造体の制振システムであって、前記加振器の加振力を制御する制御則を、強化学習を用いて定めたことを特徴とする構造体の制振システムが明らかとなる。
このような構造体の制振システムによれば、制御理論に基づく制御則(例えば最適制御)よりも優れた制御則を実現できる。これにより、加振器によって第2質点を加振することによる制振(AMD)の能力を高めることができ、制振性能の向上を図ることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社大林組
操縦装置
27日前
株式会社大林組
飛込み台
2か月前
株式会社大林組
接続構造
27日前
株式会社大林組
加熱装置
24日前
株式会社大林組
開封装置
24日前
株式会社大林組
接合構造
1か月前
株式会社大林組
測定方法
2か月前
株式会社大林組
接合構造
27日前
株式会社大林組
ドリル装置
27日前
株式会社大林組
建物の構造
1か月前
株式会社大林組
免震建築物
2か月前
株式会社大林組
仮設建築物
2か月前
株式会社大林組
スロープ構造
24日前
株式会社大林組
折畳み構造物
1か月前
株式会社大林組
耐火被覆構造
2か月前
株式会社大林組
ルーバー構造
2か月前
株式会社大林組
可搬式充電設備
1か月前
株式会社大林組
梁筋の配筋方法
16日前
株式会社大林組
災害時支援装置
16日前
株式会社大林組
床板の設置方法
2か月前
株式会社大林組
リフトアップ装置
2か月前
株式会社大林組
リフトアップ装置
2か月前
株式会社大林組
鋼矢板の圧入方法
1か月前
株式会社大林組
進捗管理システム
3日前
株式会社大林組
大梁胴縁接続構造
18日前
株式会社大林組
袋体付き排水パイプ
2か月前
株式会社大林組
袋体付き排水パイプ
2か月前
株式会社大林組
電動式運搬補助装置
26日前
株式会社大林組
構造物及び施工方法
16日前
株式会社大林組
繊維材供給システム
24日前
株式会社大林組
建築物及び建築方法
2か月前
株式会社大林組
CO2固定量測定方法
2か月前
株式会社大林組
柱接合構造の施工方法
16日前
株式会社大林組
自動屋根開閉システム
1か月前
株式会社大林組
建設現場支援システム
17日前
株式会社大林組
建物の構築方法及び建物
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ