TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165323
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024069373
出願日
2024-04-22
発明の名称
吸着ユニット、及び、それの制御に利用できるデータのデータ生成保存装置、並びに、吸着ユニットの制御を教えるティーチング方法
出願人
国立大学法人九州工業大学
代理人
個人
,
個人
,
個人
主分類
B25J
15/06 20060101AFI20251027BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】形状や重心位置が異なるワークであっても安定して落下しそうか否か等の状態を検知可能な吸着ユニットを提供する。
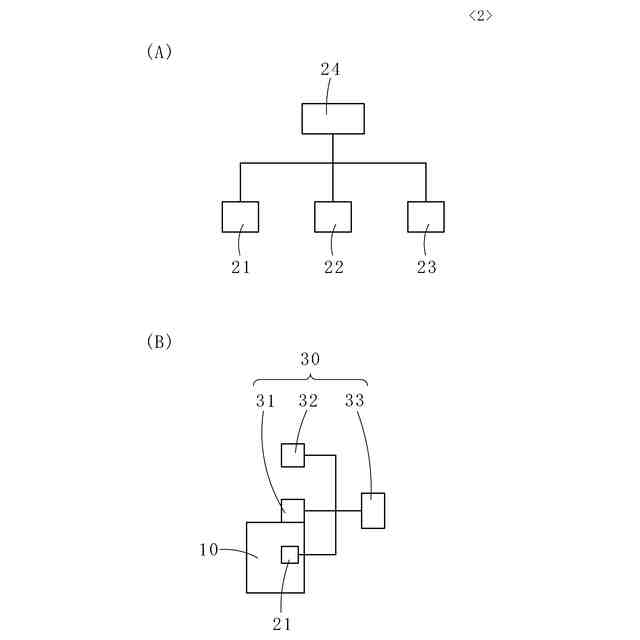
【解決手段】内側空間部11が負圧となってワークWを吸着する吸着パッド12を有する吸着ユニット10であって、吸着パッド12がワークWを吸着する力からワークWが吸着パッド12から離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサ21を備える。力センサ21は、内側空間部11に設けられているのが好ましい。
【選択図】図1
特許請求の範囲
【請求項1】
内側空間部が負圧となってワークを吸着する吸着パッドを有する吸着ユニットであって、
前記吸着パッドが前記ワークを吸着する力から前記ワークが前記吸着パッドから離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサを備えることを特徴とする吸着ユニット。
続きを表示(約 1,200 文字)
【請求項2】
前記力センサは、前記内側空間部に設けられていることを特徴とする請求項1記載の吸着ユニット。
【請求項3】
前記吸着パッドには、該吸着パッドに吸着された前記ワークから該吸着パッドに与えられる力を前記力センサに伝える力付与部材が取り付けられていることを特徴とする請求項1又は2記載の吸着ユニット。
【請求項4】
前記力付与部材は、外縁部が全周に亘って前記吸着パッドに支持された板状物であり、前記内側空間部に配された前記外縁部の内側領域には、空気が流通する貫通孔が形成されていることを特徴とする請求項3記載の吸着ユニット。
【請求項5】
前記力センサは、6軸力センサであることを特徴とする請求項1又は2記載の吸着ユニット。
【請求項6】
内側空間部が負圧となってワークを吸着する吸着パッドと、前記吸着パッドが前記ワークを吸着する力から前記ワークが前記吸着パッドから離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサとを有する吸着ユニットが装着されて、該吸着ユニットの移動及び吸着処理を制御するユニット制御装置に対して、該吸着ユニットの移動及び吸着処理の制御に利用できるデータを作成して保存するデータ生成保存装置であって、
前記ユニット制御装置に装着されていない状態の前記吸着ユニットの慣性運動を検出する運動検知手段と、
前記内側空間部の圧力を調整する圧力調整手段と、
前記力センサの計測値、前記運動検知手段の検出値、及び、前記圧力調整手段による圧力調整それぞれの時系列データを記憶する記憶手段とを備えることを特徴とするデータ生成保存装置。
【請求項7】
内側空間部が負圧となってワークを吸着する吸着パッドと、前記吸着パッドが前記ワークを吸着する力から前記ワークが前記吸着パッドから離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサとを有する吸着ユニットが装着されて、該吸着ユニットの移動及び吸着処理を制御するユニット制御装置に対し、該吸着ユニットで前記ワークを吸着し移動する処理を教えるティーチング方法であって、
前記ユニット制御装置に装着されていない状態の前記吸着ユニットを人の手で持ち、前記内側空間部の圧力を調整する圧力調整手段を操作して、該内側空間部を負圧にし、前記吸着パッドに前記ワークを吸着させ、該吸着ユニットを移動させた際の、前記力センサの計測値、運動検知手段による前記吸着ユニットの慣性運動の検出値、及び、前記圧力調整手段による圧力調整それぞれの時系列データを記憶手段に記憶させる工程と、
前記記憶手段が記憶した、前記力センサの計測値、前記運動検知手段の検出値及び前記圧力調整手段による圧力調整それぞれの時系列データを、前記ユニット制御装置に与える工程とを有することを特徴とするティーチング方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、負圧によってワークを吸着する吸着ユニット、及び、それの制御に利用可能なデータのデータ生成保存装置、並びに、吸着ユニットの制御を教えるティーチング方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、多くのエンドエフェクタとして、負圧によりワークを吸着する吸着ユニットが採用されている。吸着ユニットは、様々な重さや形状のワークに対応できるように、余裕を持った大きさの吸着力でワークを吸着する。そのため、過剰な電気エネルギーを消費し、ワークによってはワークを傷つけたり変形させたりすることとなる。
【0003】
これに関して、特許文献1には、ワークを吸着する吸着パッド(吸着部)がワークの吸着時に変形することに着目し、吸着パッドの変形を検出して、その変形度合いからワークが落下しそうになっているか否か等を検知する装置が記載されている。当該装置は、吸着パッドに配置された歪みセンサの計測値を基に吸着パッドの変形を検出し、ワークを吸着している際の吸着パッドの変形量が予め定められた値を下回ると、吸着力を増加する。従って、適度な大きさの吸着力でワークを吸着するという制御が可能である。
【先行技術文献】
【特許文献】
【0004】
特開2020-185636号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、吸着パッドの各箇所の変形量はワークの形状や重心位置等により異なることから、形状や重心位置が不明なワークが落下しそうか否か等の状態を、吸着パッドの所定の箇所の変形量を基に安定して検知できないという課題がある。
本発明は、かかる事情に鑑みてなされたもので、形状や重心位置が異なるワークであっても安定して落下しそうか否か等の状態を検知可能な吸着ユニット、及び、それの制御に利用可能なデータのデータ生成保存装置、並びに、吸着ユニットの制御を教えるティーチング方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的に沿う第1の発明に係る吸着ユニットは、内側空間部が負圧となってワークを吸着する吸着パッドを有する吸着ユニットであって、前記吸着パッドが前記ワークを吸着する力から前記ワークが前記吸着パッドから離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサを備える。
【0007】
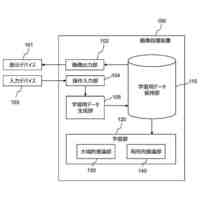
前記目的に沿う第2の発明に係るデータ生成保存装置は、内側空間部が負圧となってワークを吸着する吸着パッドと、前記吸着パッドが前記ワークを吸着する力から前記ワークが前記吸着パッドから離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサとを有する吸着ユニットが装着されて、該吸着ユニットの移動及び吸着処理を制御するユニット制御装置に対して、該吸着ユニットの移動及び吸着処理の制御に利用できるデータを作成して保存するデータ生成保存装置であって、前記ユニット制御装置に装着されていない状態の前記吸着ユニットの慣性運動を検出する運動検知手段と、前記内側空間部の圧力を調整する圧力調整手段と、前記力センサの計測値、前記運動検知手段の検出値、及び、前記圧力調整手段による圧力調整それぞれの時系列データを記憶する記憶手段とを備える。
【0008】
前記目的に沿う第3の発明に係るティーチング方法は、内側空間部が負圧となってワークを吸着する吸着パッドと、前記吸着パッドが前記ワークを吸着する力から前記ワークが前記吸着パッドから離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサとを有する吸着ユニットが装着されて、該吸着ユニットの移動及び吸着処理を制御するユニット制御装置に対し、該吸着ユニットで前記ワークを吸着し移動する処理を教えるティーチング方法であって、前記ユニット制御装置に装着されていない状態の前記吸着ユニットを人の手で持ち、前記内側空間部の圧力を調整する圧力調整手段を操作して、該内側空間部を負圧にし、前記吸着パッドに前記ワークを吸着させ、該吸着ユニットを移動させた際の、前記力センサの計測値、運動検知手段による前記吸着ユニットの慣性運動の検出値、及び、前記圧力調整手段による圧力調整それぞれの時系列データを記憶手段に記憶させる工程と、前記記憶手段が記憶した、前記力センサの計測値、前記運動検知手段の検出値及び前記圧力調整手段による圧力調整それぞれの時系列データを、前記ユニット制御装置に与える工程とを有する。
【発明の効果】
【0009】
第1の発明に係る吸着ユニットは、吸着パッドがワークを吸着する力からワークが吸着パッドから離脱しようとする力を差し引いた有効吸着力の大きさに応じた力の大きさを計測する力センサを備えるので、形状や重心位置が異なるワークであっても安定して落下しそうか否か等の状態を検知可能である。
【0010】
第2の発明に係るデータ生成保存装置は、ユニット制御装置に装着されていない状態の吸着ユニットの慣性運動を検出する運動検知手段と、内側空間部の圧力を調整する圧力調整手段と、力センサの計測値、運動検知手段の検出値、及び、圧力調整手段による圧力調整それぞれの時系列データを記憶する記憶手段とを備えるので、第1の発明に係る吸着ユニットに対応している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人九州工業大学
軟性膝装具
1か月前
国立大学法人九州工業大学
画像処理装置、画像処理方法および画像処理プログラム
15日前
国立大学法人九州工業大学
処理装置および処理方法ならびに接合装置および接合方法
22日前
国立大学法人九州工業大学
データ可視化システム、データ可視化方法及びデータ可視化プログラム
1か月前
国立大学法人九州工業大学
吸着ユニット、及び、それの制御に利用できるデータのデータ生成保存装置、並びに、吸着ユニットの制御を教えるティーチング方法
1日前
個人
フラワーホッチキス。
22日前
個人
手持ち挟持具
今日
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
26日前
株式会社マキタ
ハンマドリル
9日前
株式会社マキタ
ハンマドリル
9日前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
26日前
トヨタ自動車株式会社
ロボット
29日前
本田技研工業株式会社
装置
1か月前
川崎重工業株式会社
塗装システム
26日前
株式会社安川電機
ロボット
6日前
株式会社不二越
エッジ仕上げ装置
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
29日前
株式会社三共コーポレーション
工具保持具
今日
トヨタ自動車株式会社
ロボットハンド
6日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
ライオン株式会社
移載システム
1か月前
工機ホールディングス株式会社
作業機
26日前
アネックスツール株式会社
ドライバービット
1か月前
川崎重工業株式会社
ワーク搬送ロボット
26日前
株式会社マキタ
回転打撃工具
29日前
株式会社不二越
ロボットに用いる伝送路
19日前
株式会社マキタ
現場用作業機
15日前
ワールド技研株式会社
ロボットセル装置
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
1か月前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ