TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025161932
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2025139858,2022179116
出願日
2025-08-25,2022-11-08
発明の名称
移載システム
出願人
株式会社ダイフク
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
13/08 20060101AFI20251017BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】5軸ロボットを用いて物品をより適切に保持することができる、移載システム等を提供する。
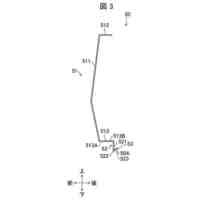
【解決手段】移載システム(1)は、ピッキングヘッド(12a)を回転させる回転機構(121)およびピッキングヘッド(12a)を回転機構(121)の回転軸と直交するチルト軸回りに傾けるチルト機構(122)を有する駆動部(12b)を含む5軸ロボットである移載部(12)と、物品(W)の吸着対象面とチルト軸とが平行になるように回転機構(121)を制御する駆動制御部(15c)と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
物品を吸着する吸着部を含むピッキングヘッドと、前記ピッキングヘッドを昇降させると共に、平面視において前記ピッキングヘッドを2方向へ移動させる駆動部であって、前記ピッキングヘッドを回転させる回転機構と、前記ピッキングヘッドを前記回転機構の回転軸と直交するチルト軸回りに傾けるチルト機構とを有する駆動部と、を含む5軸ロボットである移載部と、
前記物品の画像データを取得するカメラ部と、
前記画像データから前記物品の姿勢を検出する画像処理部と、
前記駆動部を制御する駆動制御部であって、前記物品の吸着対象面と前記チルト軸とが平行になるように前記回転機構を制御する駆動制御部と、
を備える移載システム。
続きを表示(約 570 文字)
【請求項2】
前記ピッキングヘッドは、複数の前記吸着部を含み、
前記画像処理部は、前記吸着対象面の寸法に応じて、複数の前記吸着部から前記吸着対象面に吸着させる特定吸着部を決定し、
前記駆動制御部は、前記特定吸着部を前記吸着対象面に吸着させる請求項1に記載の移載システム。
【請求項3】
前記画像処理部は、複数の前記吸着部から選択される2以上の前記吸着部に外接する仮想的な外接矩形の寸法と前記吸着対象面の寸法とを比較し、前記特定吸着部を決定する請求項2に記載の移載システム。
【請求項4】
前記画像処理部は、前記外接矩形が前記吸着対象面の外郭内に収まる寸法である場合、前記外接矩形内の前記吸着部を前記特定吸着部として決定する請求項3に記載の移載システム。
【請求項5】
前記ピッキングヘッドは、第1吸着部と第2吸着部とを含み、
前記ピッキングヘッドを前記昇降方向から見た場合、前記第1吸着部と前記第2吸着部とは、前記チルト軸を挟んで配置される、請求項1に記載の移載システム。
【請求項6】
前記ピッキングヘッドは、第3吸着部をさらに含み、
前記第2吸着部と前記第3吸着部とは、前記チルト軸の方向に並んで配置される、請求項5に記載の移載システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物流における物品の移載を行う移載システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、物流倉庫等においては、多種多量の物品を効率よく出荷先別に出荷容器へ選別仕分けするために、ロボットアーム等のピッキング装置(移載装置)を備える移載システムが用いられている。この種の移載システムに関し、特許文献1には、画像処理により検知したワークの姿勢に基づいて、多軸ロボットを制御する構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2007-245283号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、ピッキング装置としては6軸ロボットが従来使用されるが、より構造がシンプルであり多列のコンベアレイアウトにも適応し易い5軸ロボット(XYZ方向軸+ヘッドの回転軸+ヘッドのチルト軸の5軸)がピッキング装置として使用される場合がある。この場合、従来の6軸ロボットよりも1軸少ない5軸ロボットによって、物品を適切に保持する必要性がある。
【0005】
本発明は、前記5軸ロボットを用いて物品を適切に保持することができる移載システム等を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一態様に係る移載システムは、物品を吸着する吸着部を含むピッキングヘッドと、前記ピッキングヘッドを昇降させると共に、平面視において前記ピッキングヘッドを2方向へ移動させる駆動部であって、前記ピッキングヘッドを回転させる回転機構と、前記ピッキングヘッドを前記回転機構の回転軸と直交するチルト軸回りに傾けるチルト機構とを有する駆動部と、を含む5軸ロボットである移載部と、前記物品の画像データを取得するカメラ部と、前記画像データから前記物品の姿勢を検出する画像処理部と、前記駆動部を制御する駆動制御部であって、前記物品の吸着対象面と前記チルト軸とが平行になるように前記回転機構を制御する駆動制御部と、を備える。
【発明の効果】
【0007】
本発明の一態様によれば、前記5軸ロボットを用いて物品を適切に保持することができる移載システム等を提供することができる。
【図面の簡単な説明】
【0008】
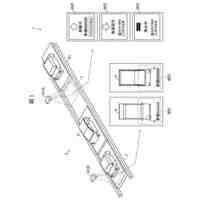
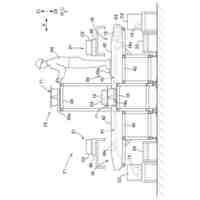
本発明の一実施形態に係る移載システムの概要を示す斜視図である。
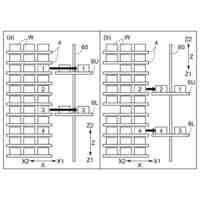
移載システムの概要を示す平面図である。
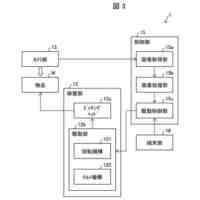
移載システムの概要を示す機能ブロック図である。
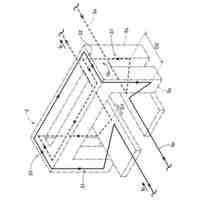
ピッキングヘッドおよび駆動部の構造を模式的に示した図である。
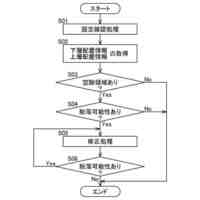
移載システムの動作例を示すフローチャートである。
図5に示した物品の姿勢を検出する画像処理ステップの動作例を示すフローチャートである。
移載部のチルト軸の軸心と物品の吸着対象面およびロール軸との具体例を説明する図である。
図4に示した吸着部のうち、2つの吸着部を特定吸着部として物品の吸着対象面に吸着させた場合の具体例を説明する図である。
特定吸着部を変更する場合の具体例を説明する図である。
1つの吸着部を特定吸着部として物品の吸着対象面に吸着させた場合の具体例を説明する図である。
上記ピッキングヘッドの別の具体例を示した図である。
【発明を実施するための形態】
【0009】
本発明の一実施形態について、図1乃至図10を参照して説明する。なお、以下の説明では、第1容器17から第2容器18へ物品Wを移載する移載システムを構成した場合を例示して説明する。
【0010】
(移載システムの概要)
まず、図1および図2を参照して移載システム1の概要について説明する。図1は、本実施形態に係る移載システム1の概要を示す斜視図である。図2は、移載システム1の概要を示す平面図である。移載システム1は、物流倉庫等において物品Wの移載を行うものである。図1および図2に示すように、本実施形態の移載システム1は、搬送部11、移載部12、カメラ部13、支持フレーム14、制御部15、および端末部16を含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイフク
倉庫
16日前
株式会社ダイフク
搬送車
1か月前
株式会社ダイフク
洗車機
1か月前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
搬送装置
24日前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
物品搬送設備
1日前
株式会社ダイフク
投影システム
2日前
株式会社ダイフク
物品搬送設備
23日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
非接触給電設備
1か月前
株式会社ダイフク
遠隔操作システム
14日前
株式会社ダイフク
自動倉庫システム
1か月前
株式会社ダイフク
シミュレーションシステム
1日前
株式会社ダイフク
検証システム及び検証方法
24日前
株式会社ダイフク
移載装置及び物品搬送装置
24日前
株式会社ダイフク
物品搬送設備及び物品搬送設備の保守方法
1か月前
株式会社ダイフク
駆動伝達装置及び駆動伝達装置を備えた昇降装置
1か月前
株式会社ダイフク
物品配置決定システム、及び、物品積付システム
15日前
台湾大福高科技設備股分有限公司
物体搬送システム
1か月前
株式会社ダイフク
移載システム
28日前
株式会社ダイフク
物品仕分け設備
1か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
16日前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
学習装置
1日前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
25日前
株式会社マキタ
ハンマドリル
25日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ