TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025160330
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2025124343,2023570206
出願日
2025-07-24,2022-05-23
発明の名称
航空機
出願人
シクロテック ゲーエムベーハー
代理人
個人
,
個人
,
個人
,
個人
主分類
B64C
27/02 20060101AFI20251015BHJP(航空機;飛行;宇宙工学)
要約
【課題】同じ方向に回転する推進デバイス、特にサイクロジャイロロータによって安定したホバリング飛行を実施することができる航空機を提供する。
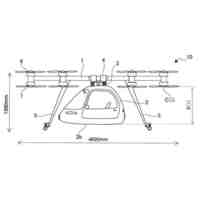
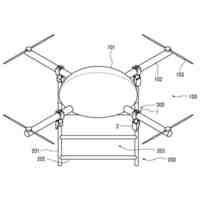
【解決手段】長手方向と垂直方向と横断方向とを定義する航空機本体と、各々の関連する回転軸の周りで回転可能であり、各々の関連する推力ベクトルを発生させる少なくとも2つの推進デバイスであって、第1の数の推進デバイスは、横断方向に対して平行な第1の直線に沿って配置されており、第2の数の推進デバイスは、横断方向に対して平行な第2の直線に沿って配置されており、第1の直線は、第2の直線から間隔を空けて配置されており、航空機の重心は、第1の直線と第2の直線との間に配置されている、少なくとも2つの推進デバイスとを含む。
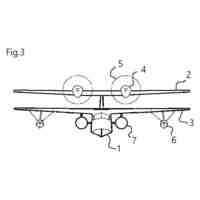
【選択図】図1
特許請求の範囲
【請求項1】
航空機(100)であって、
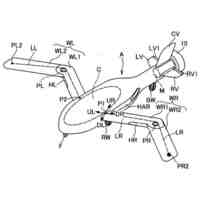
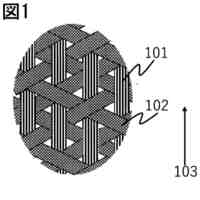
- 長手方向(101)と垂直方向(103)と横断方向(102)とを定義する航空機本体(120)であって、前記長手方向は、前記航空機(100)のテール(122)からノーズ(121)への方向に対応し、前記垂直方向は、前記航空機(100)が地面の上に載置されているときの地球の引力の方向に対応し、前記横断方向は、前記長手方向及び前記垂直方向に対して垂直である、航空機本体(120)と、
- それぞれ、関連する回転軸(5)の周りで回転可能であり、各々の関連する推力ベクトル(701、702)を発生させる少なくとも2つの推進デバイス(1、1F、1R)であって、
第1の数の前記推進デバイス(1F)は、前記横断方向(102)に対して平行な第1の直線に沿って配置されており、第2の数の前記推進デバイス(1R)は、前記横断方向(102)に対して平行な第2の直線に沿って配置されており、
前記第1の直線は、前記第2の直線から間隔を空けて配置されており、
前記航空機(100)の重心は、前記長手方向(101)に関して、前記第1の直線と前記第2の直線との間に配置されている、
少なくとも2つの推進デバイス(1、1F、1R)と、
を含み、
前記航空機(100)は、前記航空機の前記重心(150)に関して前記航空機に作用する全ての力及び前記航空機に作用する全てのトルクが実質的に消失するホバー飛行を実施するように適合されている、航空機(100)において、
前記ホバー飛行において、
- 前記関連する回転軸(5)のそれぞれは、前記航空機本体の前記横断方向(102)に実質的に方向付けられており、
- 前記少なくとも2つの推進デバイス(1、1F、1R)のそれぞれは、前記各々の関連する回転軸(5)の周りで実質的に同じ回転の方向(51)に回転する
ことを特徴とする、
航空機(100)。
続きを表示(約 2,900 文字)
【請求項2】
前記第1の数の前記推進デバイス(1F)は、前記長手方向(101)に関して前記航空機の前部領域に配置されており、前記第2の数の前記推進デバイス(1R)は、前記長手方向(101)に関して前記航空機の後部領域に配置されている、請求項1に記載の航空機(100)。
【請求項3】
ホバー飛行を実施しているときの前記航空機の前記重心(150)は、前記前部領域の前記推進デバイス(1F)が配置されている前記直線から長手方向の距離l
1
に配置され、
TIFF
2025160330000077.tif
12
170
であり、
TIFF
2025160330000078.tif
14
170
であり、
式中、
R
min
は、一方の前記前部領域に配置された前記推進デバイス(1F)の前記推力ベクトル(701)と他方の前記後部領域に配置された前記推進デバイス(1R)の前記推力ベクトル(702)との間の最小許容比、
R
max
は、一方の前記前部領域に配置された前記推進デバイス(1F)の前記推力ベクトル(701)と他方の前記後部領域に配置された前記推進デバイス(1R)の前記推力ベクトル(702)との間の最大許容比、
lは、前記第1の直線と前記第2の直線との間の距離、
a
1
は、前記前部領域に配置された前記推進デバイス(1F)の特性数、
a
2
は、前記後部領域に位置する前記推進デバイス(1R)の特性数である、
請求項2に記載の航空機(100)。
【請求項4】
ホバー飛行中に平行に整列される前記関連する回転軸を有するように適合されている、請求項1~3のいずれか一項に記載の航空機(100)。
【請求項5】
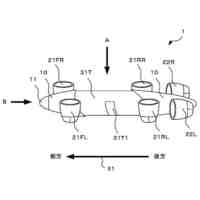
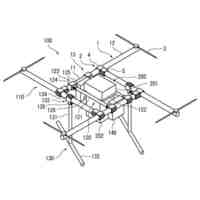
航空機(200)であって、
- 航空機胴体(220)と、
- 前記航空機胴体の周囲に取り付けられており、各々の関連する回転軸(5A、5B)の周りで回転可能であり、各々の関連する推力ベクトル(2001、2002、2003、2004)を発生させる少なくとも3つの推進デバイス(1A、1B)と、
を含み、
前記航空機(200)は、前記航空機の重心(250)に関して前記航空機に作用する全ての力及び前記航空機に作用する全てのトルクが実質的に消失するホバー飛行を実施するように適合されている、航空機(200)において、前記ホバー飛行中、
- 前記少なくとも3つの推進デバイス(1A)のうちの2つの前記関連する回転軸(5A)は、第1の方向(201)に実質的に整列しており、前記少なくとも3つの推進デバイス(1B)のうちの他の前記関連する回転軸(5B)は、第2の方向(202)に実質的に整列しており、
- 前記第1の方向(201)は前記第2の方向(202)に平行ではなく、
- 回転軸(5A)が前記第1の方向(201)に方向付けられた前記2つの推進デバイス(1A)のそれぞれは、ホバー飛行中に前記各々の関連する回転軸(5A)の周りで実質的に同じ回転方向に回転する、
ことを特徴とする、航空機(200)。
【請求項6】
- 前記航空機胴体の周囲に取り付けられており、各々の関連する回転軸(5A、5B)の周りで回転可能であり、各々の関連する推力ベクトル(2001、2002、2003、2004)を発生させる少なくとも4つの推進デバイス(1A、1B)
を含み、
前記航空機(200)は、前記ホバー飛行を実施するように適合されており、前記ホバー飛行中、
- 前記少なくとも4つの推進デバイス(1A)のうちの2つの前記関連する回転軸(5A)は、前記第1の方向(201)に実質的に整列しており、前記少なくとも4つの推進デバイス(1B)のうちの更なる2つの前記関連する回転軸(5B)は、前記第2の方向(202)に実質的に整列しており、
- ホバー飛行中に回転軸(5A)が前記第1の方向(201)に方向付けられる前記2つの推進デバイス(1A)のそれぞれは、前記各々の関連する回転軸(5A)の周りで実質的に同じ回転方向に回転する、及び/又はホバー飛行中に回転軸(5B)が前記第2の方向(202)に方向付けられる前記2つの推進デバイス(5B)のそれぞれは、前記各々の関連する回転軸(5B)の周りで実質的に同じ回転方向に回転する、
請求項5に記載の航空機(200)。
【請求項7】
3つの推進デバイスが、正三角形の辺を形成するように前記航空機胴体の周囲に配置されており、
- 前記航空機胴体(220)は、前記三角形の幾何学的中心に位置し、
- 前記第1の方向は、前記3つの推進デバイスのうちの2つが位置する直線によって定義され、
- 前記第2の方向は、前記第1の方向に対して実質的に垂直であり、
- 前記第1の方向を向いている前記直線上に位置する前記2つの推進デバイスそれぞれの前記回転軸は、前記直線と0°~30°の範囲の角度を含む、
請求項5に記載の航空機(200)。
【請求項8】
n個の推進デバイスが、n>3であるn個の辺を持つ正多角形の頂点を形成するように、前記航空機胴体の周囲に配置されており、
- 前記航空機本体(220)は、n個の辺を持つ前記多角形の幾何学的中心に位置し、
- 前記第1の方向は、前記n個の推進デバイスのうちの2つが位置する第1の直線によって定義され、
- 前記第2の方向は、前記n個の推進デバイスのうちの更に別の2つが位置する第2の直線によって定義され、
- 前記第1の方向を向いている前記第1の直線上に位置する前記2つの推進デバイスそれぞれの前記回転軸は、前記第1の直線と0°~18°の範囲の角度を含む、
請求項6に記載の航空機(200)。
【請求項9】
前記第1の直線と前記第2の直線との間の前記角度は、72°~90°の範囲である、請求項8に記載の航空機(200)。
【請求項10】
- 前記第2の方向(202)は、前記第1の方向(201)に対して実質的に垂直であり、
- 前記少なくとも4つの推進デバイス(1A)のうちの2つは、前記第1の方向(201)に沿って配置されており、前記少なくとも4つの推進デバイス(1B)のうちの他の2つは、前記第1の方向に対して実質的に垂直な前記第2の方向(202)に沿って配置されている、
請求項6~9のいずれか一項に記載の航空機(200)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
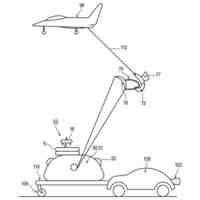
本発明は、航空機並びに航空機を製造及び制御する方法に関する。特に、本発明は、同じ方向に回転する推進デバイス、特にサイクロジャイロロータによって安定したホバリング飛行を実施することができる航空機に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
推進デバイスとしてサイクロジャイロロータを使用する航空機は、サイクロジャイロと呼ばれる。ヘリコプターと同様に、サイクロジャイロもまた、垂直離着陸(VTOL)機、すなわち、滑走路なしで垂直に離着陸することができる航空機である。
【0003】
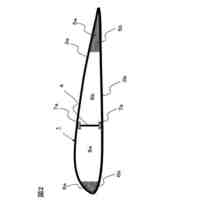
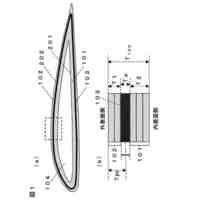
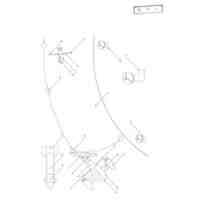
サイクロジャイロロータは、以下ロータブレードと呼ばれる回転翼による推力発生の原理に基づく。ヘリコプターの推進システムに使用されているような古典的な回転翼とは対照的に、サイクロジャイロロータのブレードの回転軸は、ブレード/ロータブレードの長手方向軸に対して平行に整列している。サイクロジャイロロータ全体の推力の方向は、回転軸に垂直である。
【0004】
ホバリング飛行又は一定速度での前進飛行などの静止動作では、いずれの場合においても必要最小限の推進力で総推力に最大限寄与するために、サイクロジャイロロータの全てのロータブレードは、理想的には、常時、流れの方向に対して可能な限り最良に方向付けられるべきである。流れの方向に対するロータブレードの最大ピッチは、発生する推力の大きさに直接影響する。ロータが回転する際、1回転の間に各ロータブレードのピッチを連続的に変更しなければならない。したがって、サイクロジャイロロータの各ロータブレードは、ピッチ角の周期的な変更を行う。ピッチ角のこの周期的な変更は、ピッチ運動と呼ばれる。
【0005】
ピッチ運動を発生させるための様々なピッチ機構が知られている。例えば、各ロータブレードは、1つ以上の接続ロッドを介して偏心支承軸に接続され得る。生じるロータブレードのピッチ運動は、各ロータの回転によって周期的に繰り返される。
【0006】
サイクロジャイロ用の推進デバイスの様々な実施形態は、例えば、欧州特許出願公開第3548378(A1)号及び欧州特許出願公開第3715249(A1)号に記載されている。
【0007】
ロータブレードの周期的な調整により、ロータの回転軸に垂直な推力ベクトルを発生させる。ロータブレードピッチを周期的に変更するためにオフセットデバイスが使用され、したがって、推力ベクトルは、ロータの回転軸に垂直な平面全体内で回転させることができる(推力ベクトル制御)。推力ベクトルに加えて、ロータは、回転軸の周りで、ロータの回転の方向と反対のトルクを発生させる。このトルクは、ロータブレードに作用する空気力、すなわち揚力及び抗力の接線成分から生じる。
【0008】
空気がロータに対して外から流れる場合、空気力学的特性、したがって、発生する推力ベクトルの特性が変化する。ロータが前進飛行中の場合、空気は、前方からロータに能動的に吹き付けられる。変化する特性は、マグヌス効果によってほぼ説明することができる。これは、「流れの中で回転する球体が、流れの方向に対して垂直な横力を受ける」ことを示す。
【0009】
横力の方向は、本体又はこの場合はサイクロジャイロロータの回転の方向に依存する。
【0010】
しかしながら、例えば、I.S.Hwangらによる論文“Development of a Four-Rotor Cyclocopter”from Journal of Aircraft,Vol. 45, No. 6, November-December 2008,pages 2151 ff.及びM.Benedictらによる論文“Experimental Optimization of MAV-Scale Cycloidal Rotor Performance” from Journal of the American Helicopter Society 56, 022005(2011)から周知の航空機又はサイクロジャイロでは、入射流が一定のままである一方で、ロータは反対方向に回転する。この場合、すなわちロータが反対方向に回転する場合、マグヌス効果によって生じるロータの横力は同じ方向に作用せず、したがって、同じ揚力が必要となる一方で、総推力は減少する又はパワー要件は増加する可能性がある。したがって、より高い前進速度及び反対の回転方向では、マグヌス効果の負の効果をロータによってもはや補償することができない可能性がある。その結果、航空機はもはや飛行できず、ロータを揚力発生構成要素として使用することはできない。
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ドローン
7か月前
個人
人工台風
3か月前
個人
着火ドローン
5か月前
個人
救難消防飛行艇
5か月前
個人
ドローンシステム
9か月前
個人
AERO JET
16日前
東レ株式会社
中空回転翼
4か月前
個人
動力原付きグライダー
1か月前
個人
無人空中移動体
27日前
個人
陸海空用の乗り物
6か月前
個人
連続回転可能な飛行機翼
5か月前
個人
導風板付き垂直離着陸機
3か月前
東レ株式会社
飛翔体用ブレード
23日前
個人
空飛ぶクルマ
4か月前
東レ株式会社
プロペラブレード
4か月前
個人
垂直離着陸機用エンジン改
9か月前
東レ株式会社
プロペラブレード
4か月前
東レ株式会社
プロペラブレード
4か月前
個人
ドローンを自動離着陸する方法
9か月前
個人
ドローン消音装置
12か月前
個人
空中移動システム
10か月前
トヨタ自動車株式会社
ドローン
7か月前
個人
エアライナー全自動パラシュート
7か月前
株式会社ACSL
システム
8か月前
株式会社ACSL
システム
8か月前
株式会社小糸製作所
飛行体ポート
5か月前
合同会社アドエア
パラシュート射出装置
7か月前
個人
搬送方法および搬送システム
5か月前
個人
ヘリコプター駆動装置
4か月前
合同会社アドエア
飛行体の落下補助装置
10か月前
個人
飛行体
4か月前
株式会社SUBARU
移動体
10か月前
個人
垂直離着陸機用ガスタービンエンジン
9か月前
個人
飛行体
29日前
個人
飛行体
4か月前
個人
パラボラ型スペースデブリカタパルト
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ