TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159838
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2024062641
出願日
2024-04-09
発明の名称
作業機械制御装置、作業機械および周辺監視方法
出願人
コベルコ建機株式会社
代理人
弁理士法人三協国際特許事務所
主分類
E02F
9/24 20060101AFI20251015BHJP(水工;基礎;土砂の移送)
要約
【課題】安全性の向上と作業性の低下の抑制とを両立させることが可能な技術を提供する。
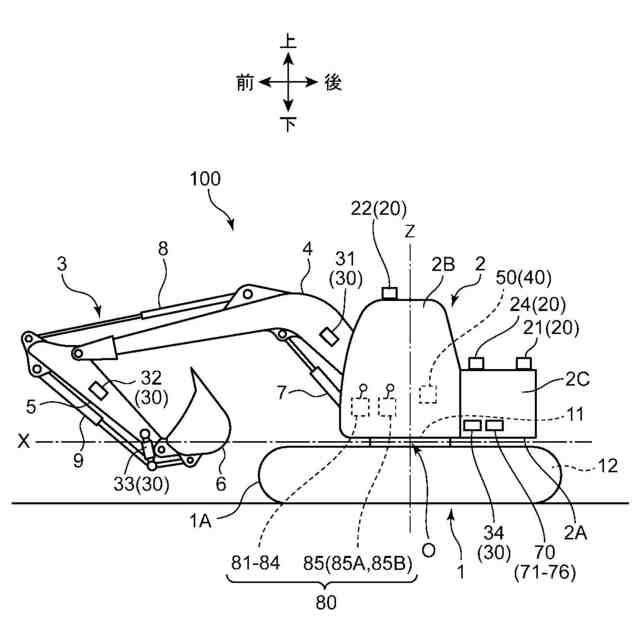
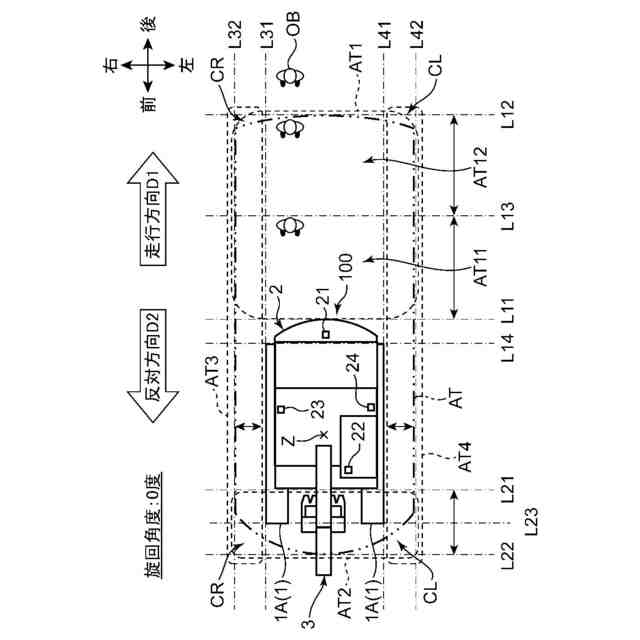
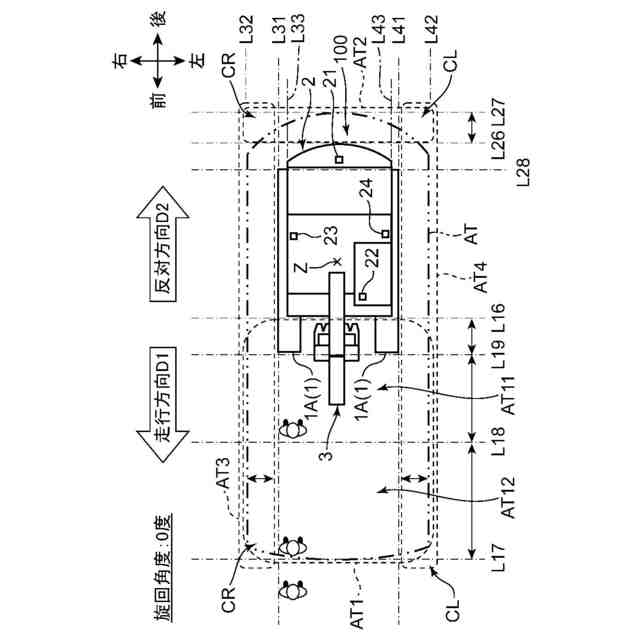
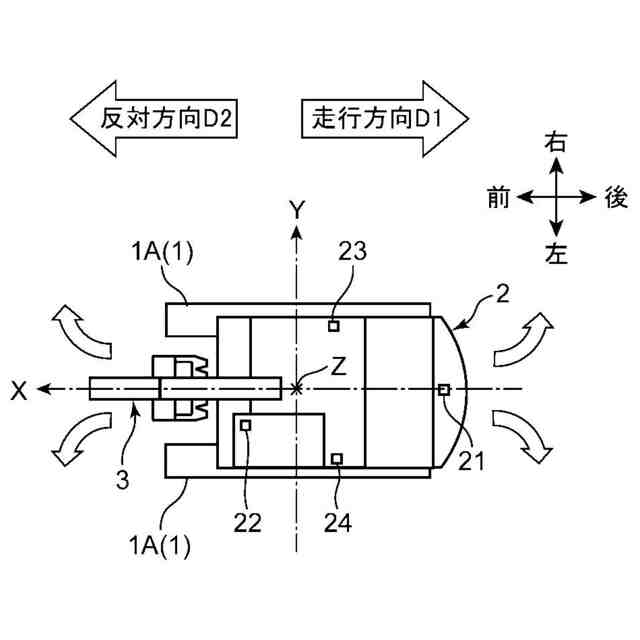
【解決手段】作業機械制御装置40は、下部走行体1と下部走行体1に旋回可能に支持される上部旋回体2と上部旋回体2に支持される作業装置3とを備える作業機械100を制御するためのコントローラ50を備える。コントローラ50は、作業機械100に対して作業機械100の走行方向D1に隣接する走行方向制限領域AT1と、作業機械100に対して走行方向D1の反対方向D2に隣接し走行方向制限領域AT1よりも狭い反対方向制限領域AT2と、を含む走行時制限領域ATを設定し、走行時制限領域ATにおいて物体OBが検出された場合に作業機械100の動作を制限する。
【選択図】図14
特許請求の範囲
【請求項1】
下部走行体と前記下部走行体に旋回可能に支持される上部旋回体と前記上部旋回体に支持される作業装置とを備える作業機械を制御するためのコントローラを備える作業機械制御装置であって、
前記コントローラは、
前記作業機械に対して前記作業機械の走行方向に隣接する走行方向制限領域と、前記作業機械に対して前記走行方向の反対方向に隣接し前記走行方向制限領域よりも狭い反対方向制限領域と、を含む走行時制限領域を設定し、
前記走行時制限領域において物体が検出された場合に前記作業機械の動作を制限する、作業機械制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記コントローラは、
前記作業機械が停止している場合に、前記作業機械に対して前記作業機械の第1の走行可能方向に隣接し前記反対方向制限領域よりも広い第1の制限領域と、前記作業機械に対して前記作業機械の第2の走行可能方向に隣接し前記反対方向制限領域よりも広い第2の制限領域と、を含む停止時制限領域を設定し、
前記作業機械が停止している場合で且つ前記停止時制限領域において物体が検出された場合に前記作業機械の動作を制限する、請求項1に記載の作業機械制御装置。
【請求項3】
前記コントローラは、前記作業機械が停止している状態から前記作業機械が走行を開始する場合、走行操作器が受ける走行指令操作に基づいて前記第1の制限領域および前記第2の制限領域の一方を前記走行方向制限領域に変更するとともに前記第1の制限領域および前記第2の制限領域の他方を前記反対方向制限領域に変更する、請求項2に記載の作業機械制御装置。
【請求項4】
前記コントローラは、前記作業機械に対して右に隣接し前記走行方向制限領域よりも狭い右側制限領域と、前記作業機械に対して左に隣接し前記走行方向制限領域よりも狭い左側制限領域と、を含む側方制限領域を前記走行時制限領域の一部として設定する、請求項1に記載の作業機械制御装置。
【請求項5】
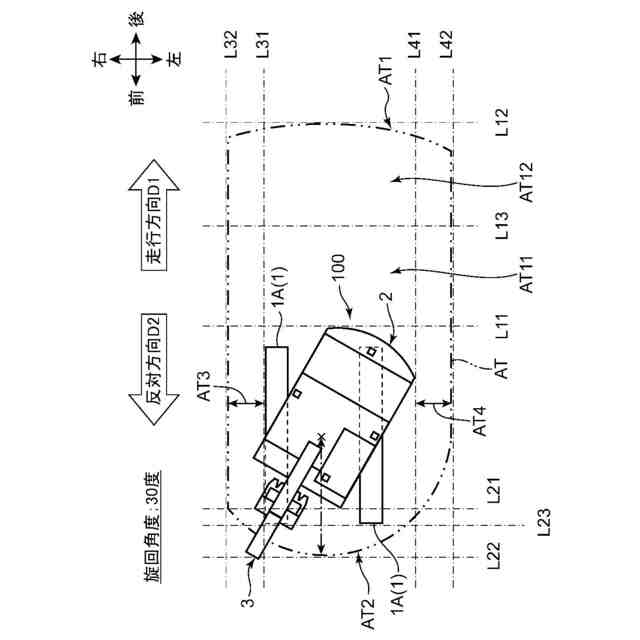
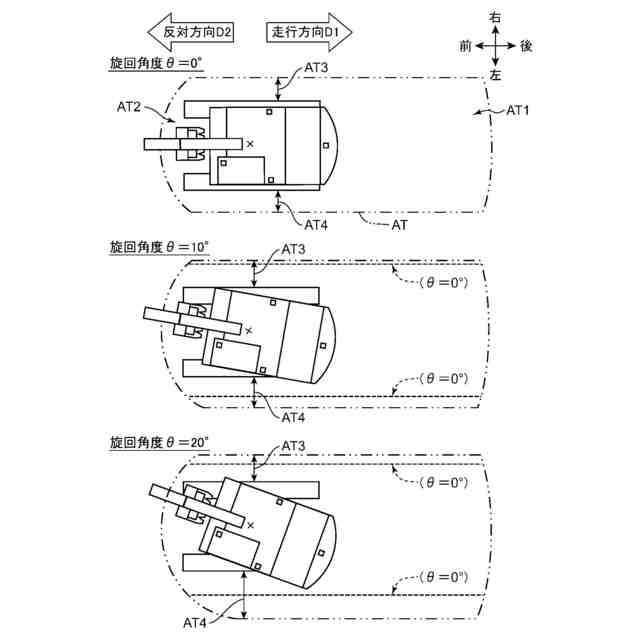
前記コントローラは、前記下部走行体の向きに対して前記走行方向が右または左にずれた方向である場合、前記側方制限領域を拡大する、請求項4に記載の作業機械制御装置。
【請求項6】
前記コントローラは、前記側方制限領域を拡大する大きさを、前記下部走行体に対する前記上部旋回体の旋回角度に応じて変更する、請求項5に記載の作業機械制御装置。
【請求項7】
前記コントローラは、前記作業装置の姿勢に応じて作業装置制限領域を設定し、前記作業装置制限領域において物体が検出された場合に前記作業機械の動作を制限する、請求項1に記載の作業機械制御装置。
【請求項8】
前記コントローラは、前記下部走行体の向きに対して前記走行方向が右または左にずれた方向である場合、前記走行方向の反対方向における前記下部走行体の端部を含む領域に前記反対方向制限領域を設定する、請求項1に記載の作業機械制御装置。
【請求項9】
前記コントローラは、前記走行方向制限領域の外縁および前記反対方向制限領域の外縁の一方または両方を、前記上部旋回体の旋回中心を中心とする円弧により規定する、請求項1に記載の作業機械制御装置。
【請求項10】
前記コントローラは、前記走行方向制限領域の一部であって前記走行方向制限領域の外縁を含む外側領域を減速領域として設定し、前記走行方向制限領域の残りの部分であって前記減速領域よりも前記上部旋回体の旋回中心に近い内側領域を停止領域として設定し、前記減速領域において物体が検出された場合、前記作業機械の走行速度を減少させ、前記停止領域において物体が検出された場合、前記作業機械の走行を停止させる、請求項1に記載の作業機械制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ショベルなどの作業機械についての技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1~7は、作業機械の周囲に存在する物体を検出することで作業の安全性を向上させるための技術を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2019-105105号公報
特開2020-183624号公報
特開2020-183622号公報
特開2016-194481号公報
特開2022-83117号公報
国際公開第2016/016981号公報
国際公開第2021/029253号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械の周囲に動作制限領域が設定され、当該動作制限領域において前記物体が検出された場合に作業機械の動作を制限することで作業の安全性が向上する。この場合、前記動作制限領域がより広く設定されると、安全性はさらに向上するが、作業中に作業機械の動作が制限される時間が増加するので作業性は低下する。従って、安全性の向上と作業性の低下の抑制とを両立させる技術が望まれる。
【0005】
本開示は、安全性の向上と作業性の低下の抑制とを両立させることが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の態様に係る作業機械制御装置は、下部走行体と前記下部走行体に旋回可能に支持される上部旋回体と前記上部旋回体に支持される作業装置とを備える作業機械を制御するためのコントローラを備え、前記コントローラは、前記作業機械に対して前記作業機械の走行方向に隣接する走行方向制限領域と、前記作業機械に対して前記走行方向の反対方向に隣接し前記走行方向制限領域よりも狭い反対方向制限領域と、を含む走行時制限領域を設定し、前記走行時制限領域において物体が検出された場合に前記作業機械の動作を制限する。
【0007】
第2の態様に係る作業機械制御装置は、第1の態様に係る作業機械制御装置においてさらに次の構成を備えることが好ましい。すなわち、第2の態様に係る作業機械制御装置では、前記コントローラは、前記作業機械が停止している場合に、前記作業機械に対して前記作業機械の第1の走行可能方向に隣接し前記反対方向制限領域よりも広い第1の制限領域と、前記作業機械に対して前記作業機械の第2の走行可能方向に隣接し前記反対方向制限領域よりも広い第2の制限領域と、を含む停止時制限領域を設定し、前記作業機械が停止している場合で且つ前記停止時制限領域において物体が検出された場合に前記作業機械の動作を制限することが好ましい。
【0008】
第3の態様に係る作業機械制御装置は、第2の態様に係る作業機械制御装置においてさらに次の構成を備えることが好ましい。すなわち、第3の態様に係る作業機械制御装置では、前記コントローラは、前記作業機械が停止している状態から前記作業機械が走行を開始する場合、走行操作器が受ける走行指令操作に基づいて前記第1の制限領域および前記第2の制限領域の一方を前記走行方向制限領域に変更するとともに前記第1の制限領域および前記第2の制限領域の他方を前記反対方向制限領域に変更することが好ましい。
【0009】
第4の態様に係る作業機械制御装置は、第1~第3の態様の何れか一つに係る作業機械制御装置においてさらに次の構成を備えることが好ましい。すなわち、第4の態様に係る作業機械制御装置では、前記コントローラは、前記作業機械に対して右に隣接し前記走行方向制限領域よりも狭い右側制限領域と、前記作業機械に対して左に隣接し前記走行方向制限領域よりも狭い左側制限領域と、を含む側方制限領域を前記走行時制限領域の一部として設定することが好ましい。
【0010】
第5の態様に係る作業機械制御装置は、第4の態様に係る作業機械制御装置においてさらに次の構成を備えることが好ましい。すなわち、第5の態様に係る作業機械制御装置では、前記コントローラは、前記下部走行体の向きに対して前記走行方向が右または左にずれた方向である場合、前記側方制限領域を拡大することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
FKS株式会社
擁壁
28日前
個人
建物の不同沈下の修正方法
4日前
鈴健興業株式会社
敷板部材
24日前
株式会社奥村組
ケーソン工法
1か月前
株式会社クボタ
作業車
26日前
株式会社クボタ
作業車
26日前
株式会社大林組
操縦装置
今日
株式会社ネクステリア
平板基礎
24日前
千代田工営株式会社
回転貫入杭
11日前
個人
擁壁用ブロックおよび擁壁
25日前
株式会社奥村組
ケーソン刃口金物
1か月前
株式会社大林組
建物の構造
25日前
株式会社熊谷組
山留壁用親杭
17日前
株式会社熊谷組
地盤改良方法
20日前
株式会社熊谷組
密度計測方法
26日前
ヤンマーホールディングス株式会社
作業機械
10日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業機械
28日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業車両
13日前
ヤマト発動機株式会社
浮遊型消波装置
28日前
ヤンマーホールディングス株式会社
作業機械
10日前
日本車輌製造株式会社
建設機械
13日前
日立建機株式会社
建設機械
18日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
建設機械
18日前
日立建機株式会社
作業機械
17日前
ライト工業株式会社
鉄筋保持用治具
18日前
カナデビア株式会社
サクション基礎
18日前
株式会社三誠
建物の免震構造
4日前
鹿島建設株式会社
接続方法および接続構造
13日前
株式会社次世代一次産業実践所
登山道の施工装置
5日前
株式会社竹内製作所
作業用車両
17日前
JFEスチール株式会社
鋼管矢板の継手構造
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ