TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025158539
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061181
出願日
2024-04-05
発明の名称
青果物収穫装置
出願人
株式会社トクイテン
代理人
個人
,
個人
主分類
A01D
46/00 20060101AFI20251009BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】複数の青果物を、破損および変形等が生じることを抑制しつつ効率良く収穫することが可能な青果物収穫装置を提供する。
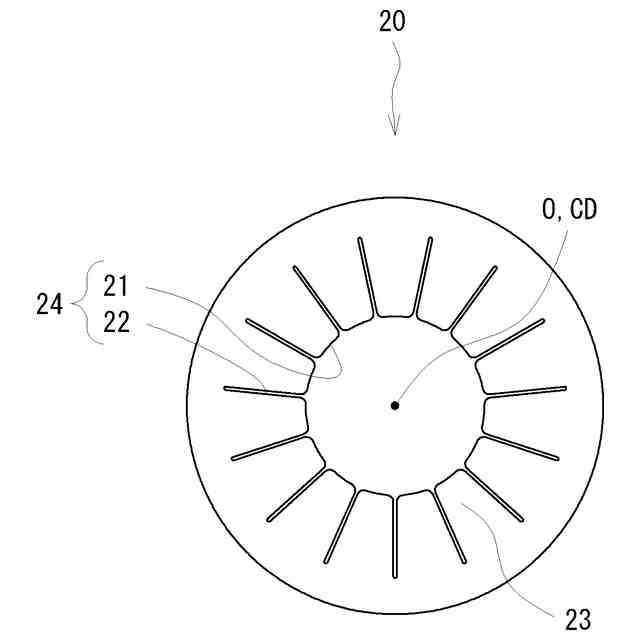
【解決手段】筒状の筒部10の内側には、青果物の通過経路が形成される。回転部20は、筒部10の内周面または先端部から通過経路の内側に向けて延びる。回転部20の内側には、先端側から後端側へ青果物を通過させることが可能な貫通部24が形成される。回転駆動部は、通過経路に沿う方向に延びる仮想軸Oを中心として、少なくとも回転部20を回転させる。回転部20は、回転しながら青果物に接触した場合に、柄によって支えられている青果物を柄に対して捻る。回転部20は、後端側へ移動する青果物に接触した際に後端側に向けて変形することで、貫通部24の面積を拡大させる。回転部20は、変形していた形状を復元させることで、貫通部24の面積を縮小させる。
【選択図】図2
特許請求の範囲
【請求項1】
青果物を後端側へ通過させる通過経路が内側に形成された筒状の部材であり、気体の吸引経路となるホースの先端側に前記通過経路が接続されることで、前記通過経路を通過した青果部を前記ホースへ導く筒部と、
前記筒部の内周面または先端部から前記通過経路の内側に向けて延びると共に、先端側から後端側へ青果物を通過させることが可能な貫通部を前記内側に形成する回転部と、
前記通過経路に沿う方向に延びる仮想軸を中心として、少なくとも前記回転部を回転させる回転駆動部と、
を備え、
前記回転部は、
回転しながら青果物に接触した場合に、柄によって支えられている前記青果物を前記柄に対して捻り、
後端側へ移動する青果物に接触した際に後端側に向けて変形することで、前記仮想軸の方向から前記回転部を見た場合の前記貫通部の面積を拡大させ、
変形していた形状を復元させることで、前記貫通部の面積を縮小させることを特徴とする青果物収穫装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の青果物収穫装置であって、
前記回転部は、可撓性および形状復元性を有するシリコンおよびゴムの少なくとも一方によって形成されていることを特徴とする青果物収穫装置。
【請求項3】
請求項1に記載の青果物収穫装置であって、
前記回転部には、中央から外側に向けて放射状に延びることで前記貫通部の少なくとも一部を構成する3つ以上の切り込みが設けられており、
前記3つ以上の切り込みの各々の内側の端部が、同一の接続点、または、前記回転部を先端側から後端側へ貫通する同一の貫通孔に接続されていることを特徴とする青果物収穫装置。
【請求項4】
請求項3に記載の青果物収穫装置であって、
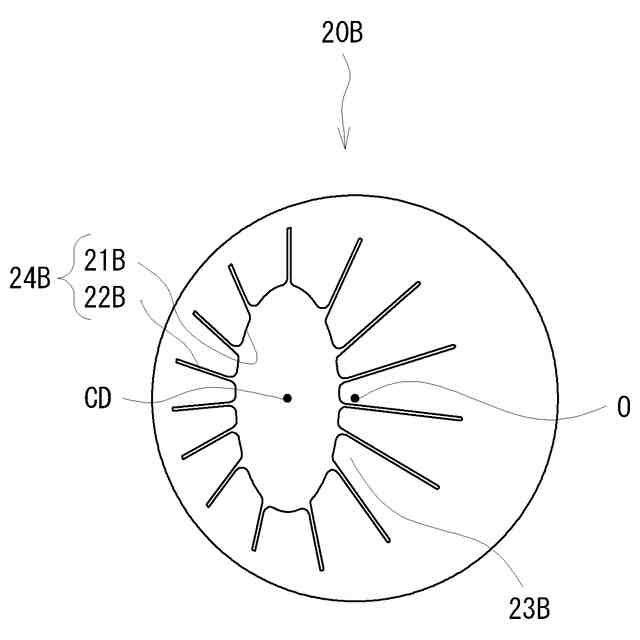
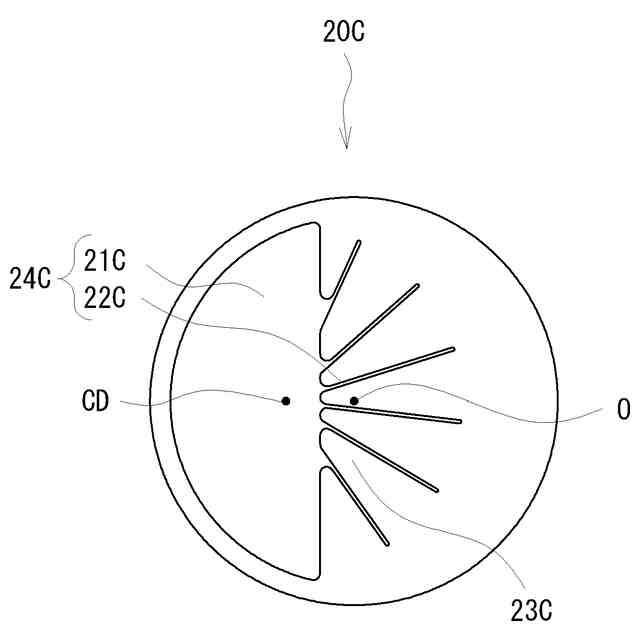
前記回転部を前記仮想軸に沿う方向から見た場合に、前記3つ以上の切り込みの各々の内側の端部が接続される前記接続点、または前記貫通孔の領域の重心が、前記仮想軸から離間していることを特徴とする青果物収穫装置。
【請求項5】
請求項3に記載の青果物収穫装置であって、
前記回転部のうち、前記3つ以上の切り込みの各々の内側の端部が、前記回転部を先端側から後端側へ貫通する同一の貫通孔に接続されており、
前記回転部を前記仮想軸に沿う方向から見た場合に、前記貫通孔の形状が楕円状または多角形状に形成されていることを特徴とする青果物収穫装置。
【請求項6】
請求項1に記載の青果物収穫装置であって、
前記回転部の周方向外側を取り囲んで覆うカバー部材をさらに備えたことを特徴とする青果物収穫装置。
【請求項7】
請求項1に記載の青果物収穫装置であって、
前記ホースと、
前記ホース内の経路を遮断しない状態で前記ホースの内側に配置され、前記ホース内を通過する青果物に接触することで、前記ホース内における前記青果物の通過速度を減少させる速度減少部を備えたことを特徴とする青果物収穫装置。
【請求項8】
請求項1に記載の青果物収穫装置であって、
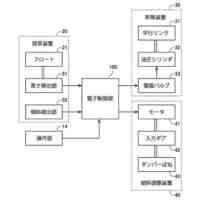
アーム部を備え、前記筒部および前記回転部を含む取込機構を前記アーム部に保持すると共に、前記アーム部を駆動させることで前記取込機構を移動させるロボットアームと、
画像を撮影する撮影部と、
前記青果物収穫装置の制御を司る制御部と、
をさらに備え、
前記制御部は、
前記撮影部によって撮影された画像に基づいて、収穫の対象とする青果物の位置を認識し、認識した青果物の位置に基づいて前記ロボットアームの駆動を制御することで、認識した青果物の位置に前記取込機構を移動させることを特徴とする青果物収穫装置。
【請求項9】
請求項8に記載の青果物収穫装置であって、
前記撮影部は、被写体との間の距離を測定可能な三次元カメラを含むことを特徴とする青果物収穫装置。
【請求項10】
請求項8に記載の青果物収穫装置であって、
前記撮影部はカラー画像を撮影することが可能であり、
前記制御部は、前記撮影部によって撮影されたカラー画像に基づいて、カラー画像に写る1つまたは複数の青果物から、収穫の対象とする青果物を特定することを特徴とする青果物収穫装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、青果物を収穫するために使用される青果物収穫装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
トマト等の種々の青果物の収穫は、未だに手作業で行われる場合が多い。従って、青果物の収穫効率を向上させるための有用な技術が確立されることが望ましい。
【0003】
例えば、特許文献1に記載の果実収穫用エンドエフェクタは、U字型金具に取り込んだ果実の小果梗を小果梗押さえによって押さえた状態で、小果梗をU字型金具で引っ掛けてちぎる。また、特許文献2に記載の収穫ロボットは、収穫リングを果実側面に沿って押し上げる動作において、収穫リングにひねりを加えて引き寄せることで、果実をもぎ取る。
【先行技術文献】
【特許文献】
【0004】
特開2010-207288号公報
特開2021-036821号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1および特許文献2に記載のように、金具またはリング等を個々の青果物に接触させて青果物をもぎ取る場合には、収穫の効率を向上させ難い。また、金具またはリング等によって青果物をもぎ取る際に、青果物に破損および変形等が生じてしまう可能性も高くなってしまう。
【0006】
本願発明の発明者は、気体の吸引力を利用して青果物を収穫することで、収穫の効率向上および破損等の抑制を実現できる可能性があると考えた。しかしながら、本願の発明者が試行を繰り返して誠意検討したところ、気体の吸引力が弱すぎると、青果物を適切に吸引することができず、収穫の精度が低下する可能性があることが判明した。また、気体の吸引力が強すぎると、収穫の効率は向上するものの、吸引経路内の物体への衝突等によって青果物に破損および変形等が生じてしまう場合もあった。青果物の形状、大きさ、および硬さ等には個体差があるので、適切な吸引力を一義的に定めるのは困難である。さらには、個々の青果物を支える柄(軸、果梗、枝、または茎等と言われる場合もある)からもぎ取る際に、柄に対して青果物を適度に捻らなければ、青果物を柄から適切にもぎ取ることができない場合もある。従って、形状等に個体差がある複数の青果物を、破損および変形等が生じることを抑制しつつ効率良く収穫できる技術が望まれる。
【0007】
本開示の典型的な目的は、複数の青果物を、破損および変形等が生じることを抑制しつつ効率良く収穫することが可能な青果物収穫装置を提供することである。
【課題を解決するための手段】
【0008】
本開示における典型的な実施形態が提供する青果物収穫装置は、青果物を後端側へ通過させる通過経路が内側に形成された筒状の部材であり、気体の吸引経路となるホースの先端側に前記通過経路が接続されることで、前記通過経路を通過した青果部を前記ホースへ導く筒部と、前記筒部の内周面または先端部から前記通過経路の内側に向けて延びると共に、先端側から後端側へ青果物を通過させることが可能な貫通部を前記内側に形成する回転部と、前記通過経路に沿う方向に延びる仮想軸を中心として、少なくとも前記回転部を回転させる回転駆動部と、を備え、前記回転部は、回転しながら青果物に接触した場合に、柄によって支えられている前記青果物を前記柄に対して捻り、後端側へ移動する青果物に接触した際に後端側に向けて変形することで、前記仮想軸の方向から前記回転部を見た場合の前記貫通部の面積を拡大させ、変形していた形状を復元させることで、前記貫通部の面積を縮小させる。
【0009】
本開示に係る青果物収穫装置によると、複数の青果物が、破損および変形等が生じることが抑制された状態で効率良く収穫され易くなる。
【図面の簡単な説明】
【0010】
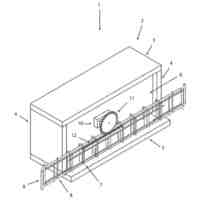
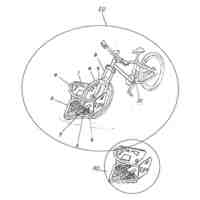
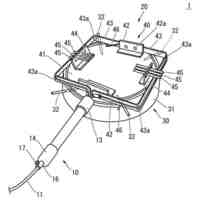
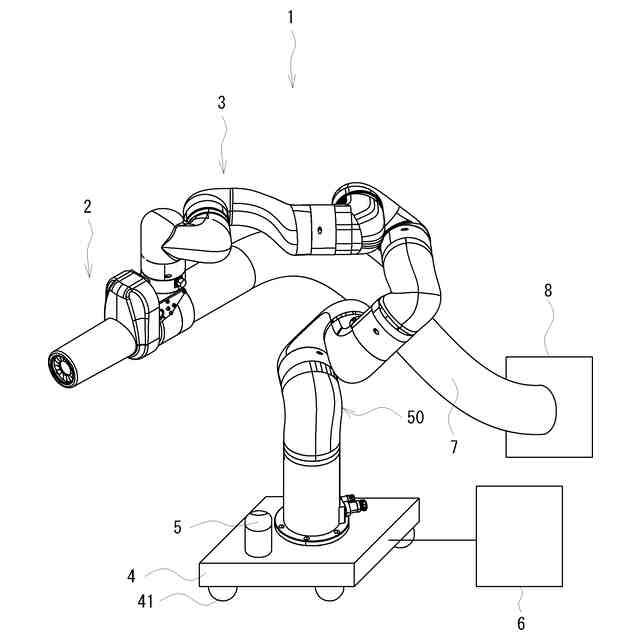
青果物収穫装置1を右斜め上方から見た斜視図である。
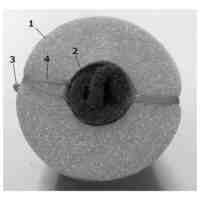
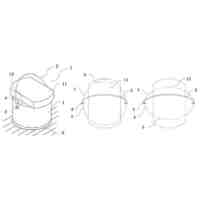
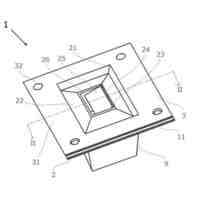
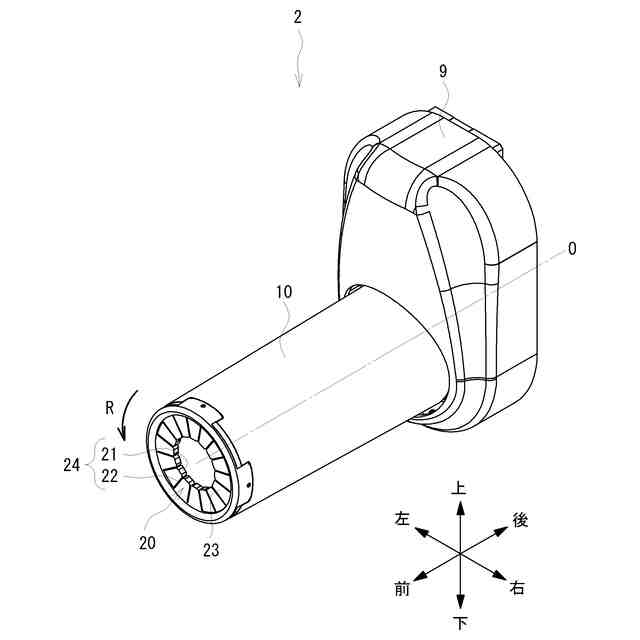
カバー部材11(図4参照)を取り外した状態の取込機構2を右斜め上方から見た斜視図である。
カバー部材11(図4参照)を取り外した状態の取込機構2の正面図(仮想軸Oに沿う方向から見た図)である。
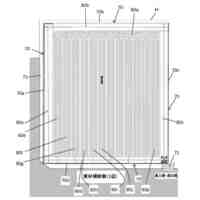
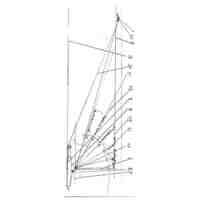
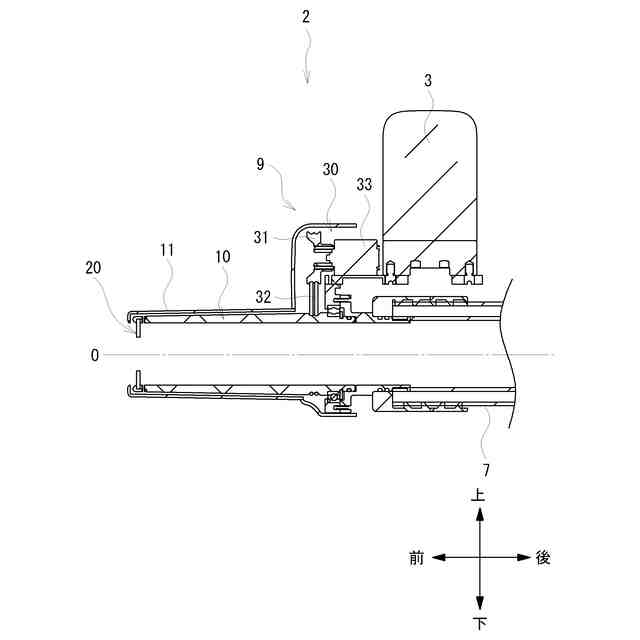
図3におけるA-A線矢視方向断面図(カバー部材11が装着された状態の図)である。
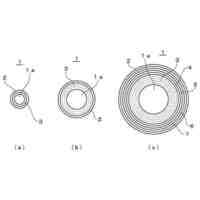
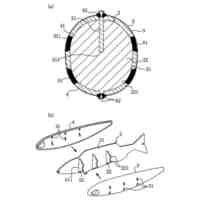
回転部20の正面図(仮想軸Oに沿う方向から見た図)である。
ホース7を経路に交差する断面で見た断面図である。
第1変形例の回転部20Aの正面図(仮想軸Oに沿う方向から見た図)である。
第2変形例の回転部20Bの正面図(仮想軸Oに沿う方向から見た図)である。
第3変形例の回転部20Cの正面図(仮想軸Oに沿う方向から見た図)である。
第4変形例の回転部20Dの正面図(仮想軸Oに沿う方向から見た図)である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
産卵床
10日前
個人
釣り用錘
28日前
個人
平板植栽
11日前
個人
噴霧器ノズル
26日前
個人
蜜蜂保護装置
1か月前
個人
果実袋
10日前
個人
種子の製造方法
1か月前
個人
養殖器具
10日前
個人
移動体草刈り機
10日前
個人
昆虫捕集器
1か月前
個人
水田排水量調整器具
10日前
株式会社剛樹
釣り竿
24日前
個人
可動リップ付きルアー
1か月前
個人
ブルーカーボンシステム
1か月前
株式会社ナベル
表示システム
1か月前
個人
餌付き針の餌取り防止具
1か月前
井関農機株式会社
圃場作業機
3日前
井関農機株式会社
圃場作業機
1か月前
積水樹脂株式会社
シート止め具
10日前
有限会社信英精密
括り罠
18日前
個人
網口高さのベクトル底引き網
10日前
井関農機株式会社
苗移植機
18日前
個人
粘着板で挟むネズミ捕り装置
10日前
株式会社サワエ
害虫捕獲器
3日前
松山株式会社
収穫機
1か月前
松山株式会社
収穫機
1か月前
みのる産業株式会社
除草機
1か月前
みのる産業株式会社
除草機
1か月前
株式会社中村工務店
潅水装置
11日前
三恵技研工業株式会社
ルアー
10日前
株式会社アテックス
芝草の刈取装置
17日前
個人
つる状多肉植物の製造方法
7日前
松山株式会社
草刈作業機
1か月前
個人
自閉式「洗濯バサミ型」虫捕獲器
18日前
株式会社シマノ
釣糸ガイド
1か月前
株式会社シマノ
釣糸ガイド
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ