TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154784
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057974
出願日
2024-03-29
発明の名称
走行制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/08 20120101AFI20251002BHJP(車両一般)
要約
【課題】牽引車両に被牽引車両を連結した状態で、牽引車両と被牽引車両との間に障害物が存在する場合であっても、安全性を高めることができる走行制御装置を提供する。
【解決手段】走行制御装置は、牽引車両と被牽引車両と連結された状態で牽引車両と被牽引車両との間の連結領域に対する周辺監視情報を取得する取得部と、連結領域に障害物が存在するか否かを判定する判定部と、連結領域に障害物が存在する場合に、警報情報を生成して出力する警報制御部と牽引車両の制動力を制御して牽引車両の移動を停止させる制御部との少なくとも一方、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
牽引車両と被牽引車両と連結された状態で前記牽引車両と前記被牽引車両との間の連結領域に対する周辺監視情報を取得する取得部と、
前記連結領域に障害物が存在するか否かを判定する判定部と、
前記連結領域に前記障害物が存在する場合に、警報情報を生成して出力する警報制御部と前記牽引車両の制動力を制御して前記牽引車両の移動を停止させる制御部との少なくとも一方と、
を備える、走行制御装置。
続きを表示(約 300 文字)
【請求項2】
前記取得部は前記周辺監視情報として、前記連結領域を含む画像情報と、前記牽引車両の後端面から後方に存在する物体までの距離を示す測距情報と、の少なくとも一方を取得する、請求項1に記載の走行制御装置。
【請求項3】
前記牽引車両の後端面と前記被牽引車両の前端面との間の距離と、前記測距情報と、に基づいて、前記連結領域に障害物が存在するか否かを判定する判定部を備える、請求項2に記載の走行制御装置。
【請求項4】
前記制御部は、前記牽引車両の運転者が降車状態で前記牽引車両の走行を制御する走行制御部を含む、請求項1から請求項3のいずれか1項に記載の走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、走行制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、牽引車両(トラクタ)の後部に旋回自在に連結されて牽引される被牽引車両(トレーラ)が知られている。牽引車両が被牽引車両を連結していない場合、牽引車両に搭乗する運転者は、サイドミラー等を視認したり、牽引車両の後部に設けられた撮像部(カメラ)で撮像した画像を運転席の表示装置を介して視認したりすることで後方確認を行いながら後退走行することができる。しかしながら、牽引車両が被牽引車両を連結されている場合は、サイドミラー等の視認領域や撮像部の撮像領域の一部または全てが被牽引車両によって遮られて死角になってしまう場合がある。そこで、保存しておいた画像と現在の画像とを用いて死角領域を補って表示装置に表示することにより、後退走行時の後方視認性を向上する技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-87875号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、被牽引車両を連結した状態で運転操作を行う場合、被牽引車両を連結していない場合に比べて、運転操作が複雑になり被牽引車両の状態に気を取られて運転操作に余裕がなくなる虞がある。上記先行技術文献では、被牽引車両により生じる死角領域には言及があるものの、牽引車両と被牽引車両との間の領域については言及がなく、当該領域についても安全性を高めるべく改良の余地がある。
【0005】
そこで、本発明の課題の一つは、牽引車両に被牽引車両を連結した状態で、牽引車両と被牽引車両との間に障害物が存在する場合に、より安全性を高めることができる走行制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の実施形態にかかる走行制御装置は、例えば、牽引車両と被牽引車両と連結された状態で前記牽引車両と前記被牽引車両との間の連結領域に対する周辺監視情報を取得する取得部と、前記連結領域に障害物が存在するか否かを判定する判定部と、前記連結領域に前記障害物が存在する場合に、警報情報を生成して出力する警報制御部と前記牽引車両の制動力を制御して前記牽引車両の移動を停止させる制御部との少なくとも一方、を備える。
【発明の効果】
【0007】
本発明の実施形態にかかる走行制御装置によれば、牽引車両と被牽引車両との間に障害物が存在する場合であっても、より安全性を高めることができる。
【図面の簡単な説明】
【0008】
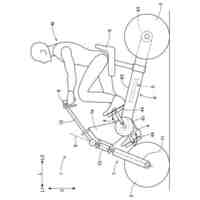
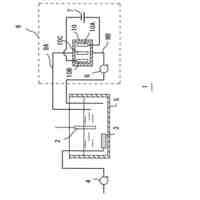
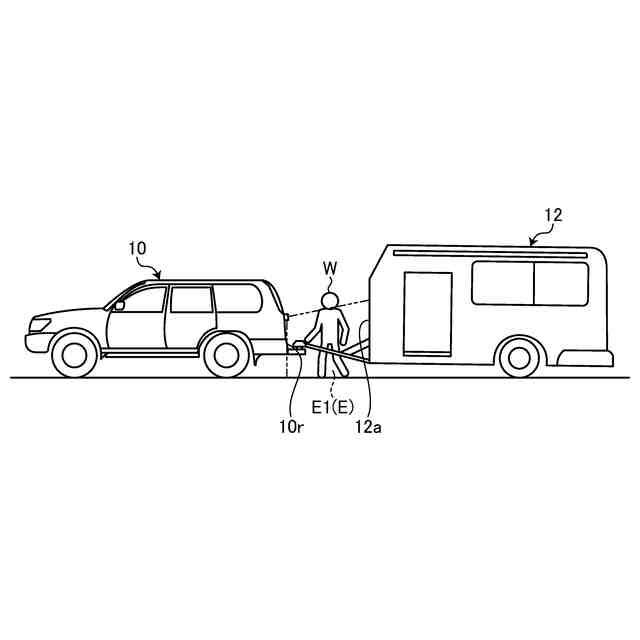
図1は、実施形態にかかる走行制御装置を搭載する牽引車両と被牽引車両の連結状態を示す例示的かつ模式的な側面図である。
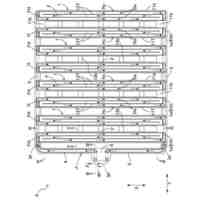
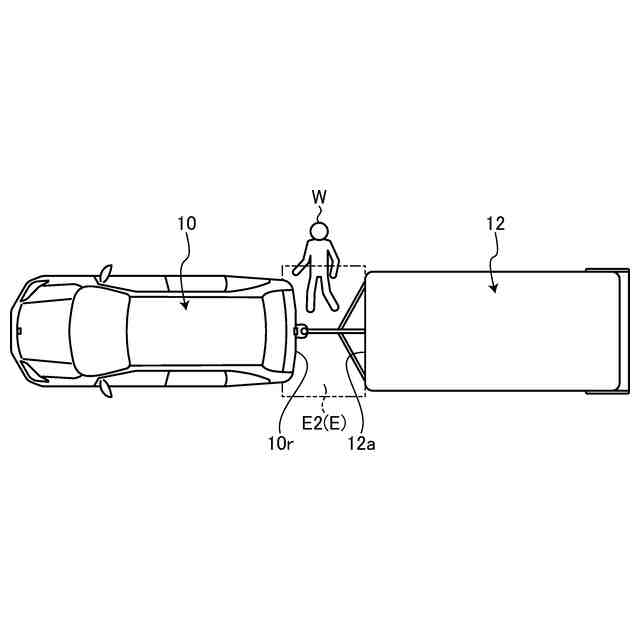
図2は、実施形態にかかる走行制御装置を搭載する牽引車両と被牽引車両の連結状態を示す例示的かつ模式的な上面図である。
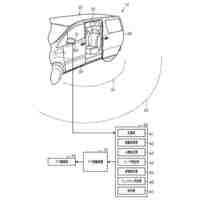
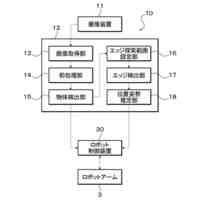
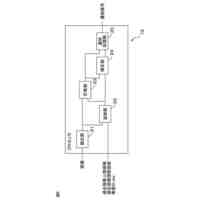
図3は、実施形態にかかる走行制御装置を含む走行制御システムの構成を示す例示的かつ模式的な説明図なブロック図である。
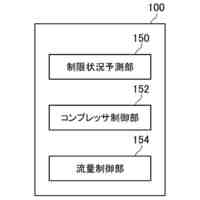
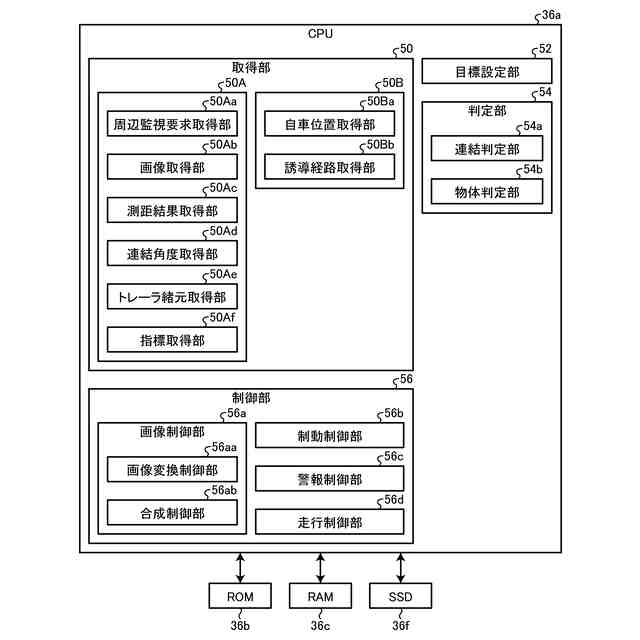
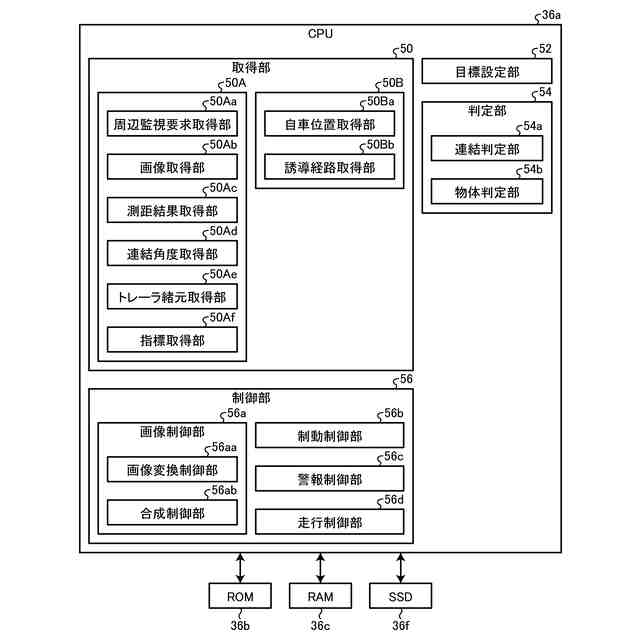
図4は、実施形態にかかる走行制御装置のCPUが実現する構成を示す例示的かつ模式的なブロック図である。
図5は、実施形態にかかる走行制御装置において、連結領域に障害物(例えば人)が存在する状況を示す例示的かつ模式的な側面視図である。
図6は、実施形態にかかる走行制御装置において、連結領域に障害物(例えば人)が存在する状況を示す例示的かつ模式的な上面視図である。
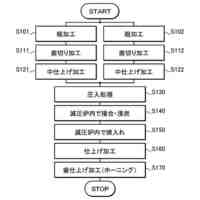
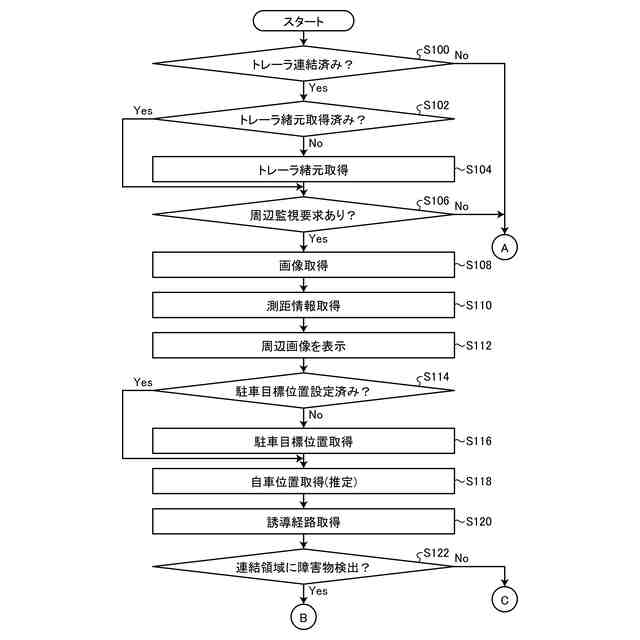
図7は、実施形態にかかる走行制御装置による走行制御処理の前半部分を説明する例示的なフローチャートである。
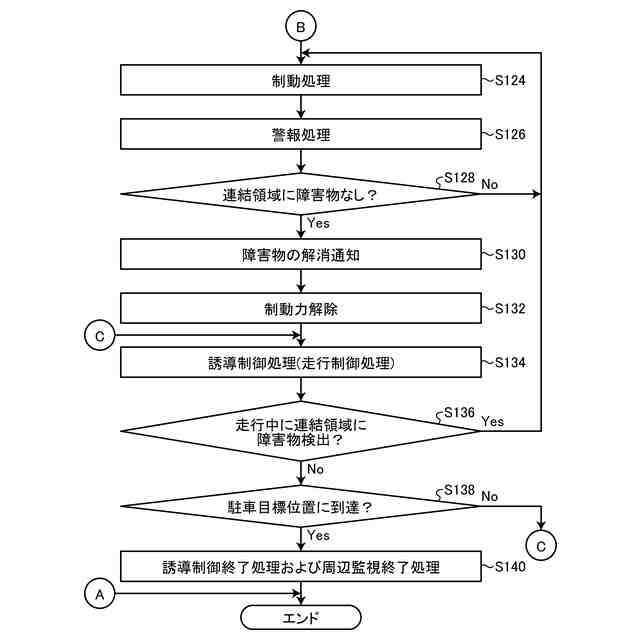
図8は、実施形態にかかる走行制御装置による走行制御処理の後半部分を説明する例示的なフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の例示的な実施形態が開示される。以下に示される実施形態の構成、ならびに当該構成によってもたらされる作用、結果、および効果は、一例である。本発明は、以下の実施形態に開示される構成以外によっても実現可能であるとともに、基本的な構成に基づく種々の効果や、派生的な効果のうち、少なくとも一つを得ることが可能である。
【0010】
図1は、実施形態の走行制御装置を搭載する牽引車両10および牽引車両10に牽引される被牽引車両12を示す例示的かつ模式的な側面図である。図1では、矢印A方向を牽引車両10を基準とする前方、矢印B方向を牽引車両10を基準とする後方としている。図2は、図1に示す牽引車両10および被牽引車両12を示す例示的かつ模式的な上面図である。また、図3は、牽引車両10に搭載される走行制御装置を含む走行制御システム100の構成を示す例示的かつ模式的なブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
車両
12日前
株式会社アイシン
車両
12日前
株式会社アイシン
熱交換器
12日前
株式会社アイシン
熱交換器
12日前
株式会社アイシン
ヒートシンク
25日前
株式会社アイシン
キックセンサ
25日前
株式会社アイシン
電力変換装置
25日前
株式会社アイシン
操作検出装置
6日前
株式会社アイシン
動力変換装置
12日前
株式会社アイシン
車両用駆動装置
27日前
株式会社アイシン
冷却モジュール
25日前
株式会社アイシン
車両用ドア装置
25日前
株式会社アイシン
車両用駆動装置
25日前
株式会社アイシン
車両用駆動装置
12日前
株式会社アイシン
回転角検出装置
12日前
株式会社アイシン
位置姿勢取得装置
5日前
株式会社アイシン
車両用駆動伝達装置
12日前
株式会社アイシン
複合歯車の製造方法
4日前
株式会社アイシン
車両用駆動伝達装置
27日前
株式会社アイシン
車両用駆動伝達装置
28日前
株式会社アイシン
二酸化炭素回収システム
5日前
株式会社アイシン
車両用のドアロック装置
25日前
株式会社アイシン
ペロブスカイト太陽電池
26日前
株式会社アイシン
静電容量センサシステム
26日前
株式会社アイシン
ペロブスカイト太陽電池の製造方法
13日前
株式会社アイシン
バルブ装置の学習装置及び学習方法
28日前
株式会社アイシン
バルブ制御装置及びバルブ制御方法
28日前
株式会社アイシン
ペロブスカイト太陽電池及びカーボン液
4日前
株式会社アイシン
車両用制御装置及び車両用制御プログラム
5日前
株式会社アイシン
水性エマルジョン系制振塗料組成物及びその硬化塗膜
25日前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
1か月前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
1か月前
株式会社アイシン
ペロブスカイト太陽電池及びペロブスカイト太陽電池の製造方法
1か月前
トヨタ自動車株式会社
計数装置、計数方法及び計数用コンピュータプログラム
4日前
ミクロエース株式会社
被覆銅材の剥離処理方法、処理装置、処理装置制御部およびプログラム
1か月前
個人
タイヤレバー
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ