TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154455
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057463
出願日
2024-03-29
発明の名称
車両制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B62D
6/00 20060101AFI20251002BHJP(鉄道以外の路面車両)
要約
【課題】車両を目標経路に沿って走行させる場合に、車両の横方向偏差とヨー角偏差が急変したときでも急操舵を回避する。
【解決手段】実施形態の車両制御装置は、以下の処理を行う。車両を目標経路に沿って走行させる場合に、車両をカーブ走行させるときの操舵制御に関し、目標経路に基づく目標曲率を用いたフィードフォワード制御を行うとともに、車両の横方向偏差とヨー角偏差を用いたフィードバック制御を行う。その場合、横方向偏差とヨー角偏差について変化をなめらかにするためのなまし処理を実行し、その処理結果を用いて目標操舵角を算出する。
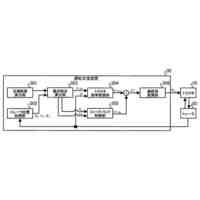
【選択図】図5
特許請求の範囲
【請求項1】
車両を目標経路に沿って走行させる場合の操舵制御に関し、前記目標経路に基づく目標曲率を用いたフィードフォワード制御を行うとともに、前記車両の横方向偏差とヨー角偏差を用いたフィードバック制御を行う車両制御装置であって、
前記車両の現在の位置を推定して車両位置情報を出力する車両位置推定部と、
前記目標経路および前記車両位置情報に基づいて、前記車両の実横方向位置と、前記目標経路に基づく目標横方向位置と、の偏差である横方向偏差を算出する横方向偏差算出部と、
前記横方向偏差を入力し、前記横方向偏差の変化をなめらかにするための第1のなまし処理を実行して、補正後横方向偏差を出力する第1のフィルタ処理部と、
前記目標経路および前記車両位置情報に基づいて、前記車両の実ヨー角と、前記目標経路に基づく目標ヨー角と、の偏差であるヨー角偏差を算出するヨー角偏差算出部と、
前記ヨー角偏差を入力し、前記ヨー角偏差の変化をなめらかにするための第2のなまし処理を実行して、補正後ヨー角偏差を出力する第2のフィルタ処理部と、
前記目標経路に基づく目標曲率と、前記補正後横方向偏差と、前記補正後ヨー角偏差と、に基づいて、目標操舵角を算出する目標操舵角算出部と、
前記目標操舵角に基づいて操舵を制御する制御部と、を備える車両制御装置。
続きを表示(約 390 文字)
【請求項2】
前記目標経路が更新された場合、
前記第1のフィルタ処理部は、前記第1のなまし処理を開始し、前記補正後横方向偏差が収束するまで前記第1のなまし処理を実行し、
前記第2のフィルタ処理部は、前記第2のなまし処理を開始し、前記補正後ヨー角偏差が収束するまで前記第2のなまし処理を実行する、請求項1に記載の車両制御装置。
【請求項3】
前記車両位置情報が示す前記車両の位置が前記目標経路から外れているときに前記操舵制御が開始された場合、
前記第1のフィルタ処理部は、前記第1のなまし処理を開始し、前記補正後横方向偏差が収束するまで前記第1のなまし処理を実行し、
前記第2のフィルタ処理部は、前記第2のなまし処理を開始し、前記補正後ヨー角偏差が収束するまで前記第2のなまし処理を実行する、請求項1に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、車両制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、車両を目標経路に沿って走行させる技術の開発が進められている。その技術では、車両をカーブ走行させるときの操舵制御に関し、例えば、目標経路に基づく目標曲率を用いたフィードフォワード制御を行うとともに、車両の横方向偏差とヨー角偏差を用いたフィードバック制御を行う。
【0003】
そのような技術において、不自然な操舵制御を防止することを目的として、例えば、車両が認識する目標駐車枠の座標軸のズレが大きい際にフィードバック制御を中断したりフィードバックゲインを弱めたりする技術がある。
【先行技術文献】
【特許文献】
【0004】
特開2020-59330号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
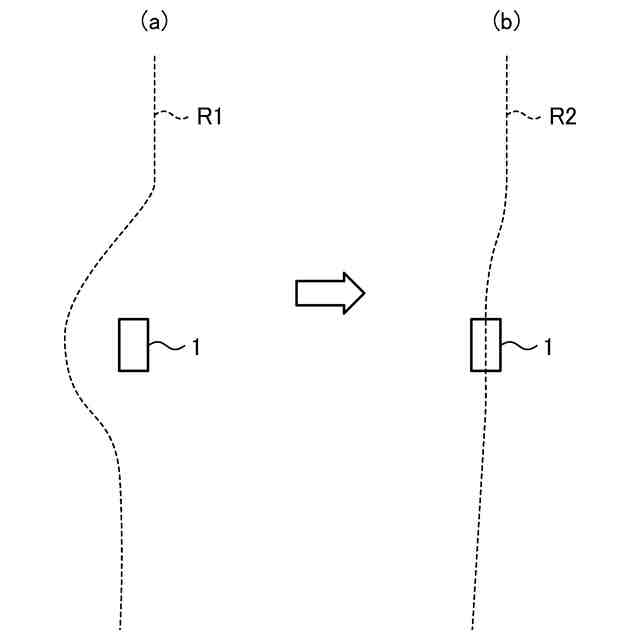
しかしながら、上述の従来技術では、例えば、次のような問題が発生しうる。まず、車両の現在の推定位置が目標経路から外れてしまっていて、フィードバック制御によって車両を目標経路に向けて移動させるために操舵制御して旋回移動しているものとする。そのときに、目標経路が更新されて、突然、車両の現在の推定位置が目標経路上にあることになる場合がある。その場合、車両の横方向偏差とヨー角偏差が急に0(または0に近い値)になるので、フィードバック制御によって、旋回移動から直進移動に移行するための急操舵が発生してしまい、乗員の乗り心地等の点で好ましくない。
【0006】
そこで、本発明は、上記事情に鑑みてなされたものであり、車両を目標経路に沿って走行させる場合に、車両の横方向偏差とヨー角偏差が急変したときでも急操舵を回避することができる車両制御装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、実施形態の車両制御装置は、車両を目標経路に沿って走行させる場合に、前記車両をカーブ走行させるときの操舵制御に関し、前記目標経路に基づく目標曲率を用いたフィードフォワード制御を行うとともに、前記車両の横方向偏差とヨー角偏差を用いたフィードバック制御を行う車両制御装置であって、前記車両の現在の位置を推定して車両位置情報を出力する車両位置推定部と、前記目標経路および前記車両位置情報に基づいて、前記車両の実横方向位置と、前記目標経路に基づく目標横方向位置と、の偏差である横方向偏差を算出する横方向偏差算出部と、前記横方向偏差を入力し、前記横方向偏差の変化をなめらかにするための第1のなまし処理を実行して、補正後横方向偏差を出力する第1のフィルタ処理部と、前記目標経路および前記車両位置情報に基づいて、前記車両の実ヨー角と、前記目標経路に基づく目標ヨー角と、の偏差であるヨー角偏差を算出するヨー角偏差算出部と、前記ヨー角偏差を入力し、前記ヨー角偏差の変化をなめらかにするための第2のなまし処理を実行して、補正後ヨー角偏差を出力する第2のフィルタ処理部と、前記目標経路に基づく目標曲率と、前記補正後横方向偏差と、前記補正後ヨー角偏差と、に基づいて、目標操舵角を算出する目標操舵角算出部と、前記目標操舵角に基づいて操舵を制御する制御部と、を備える。
【0008】
この構成によれば、車両を目標経路に沿って走行させる場合に、車両の横方向偏差とヨー角偏差が急変したときでも急操舵を回避することができる。
【図面の簡単な説明】
【0009】
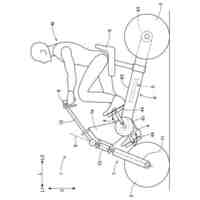
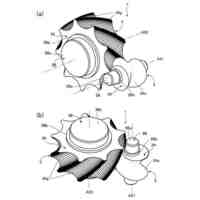
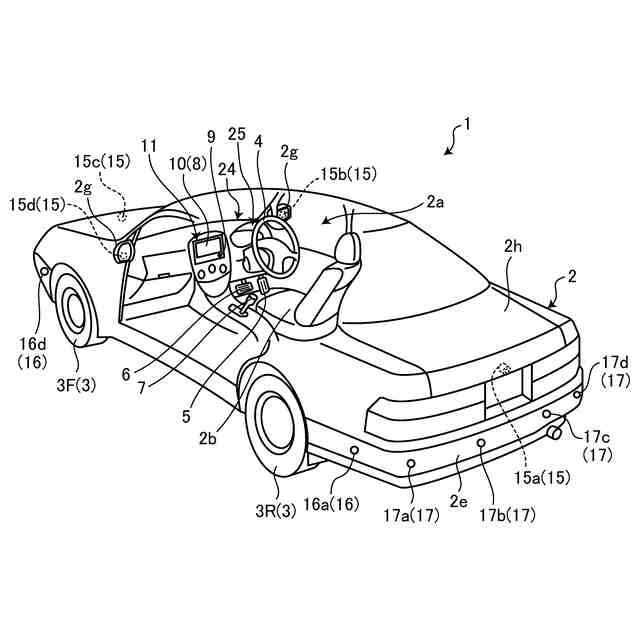
図1は、実施形態の車両の車室の一部が透視された状態が示された例示的な斜視図である。
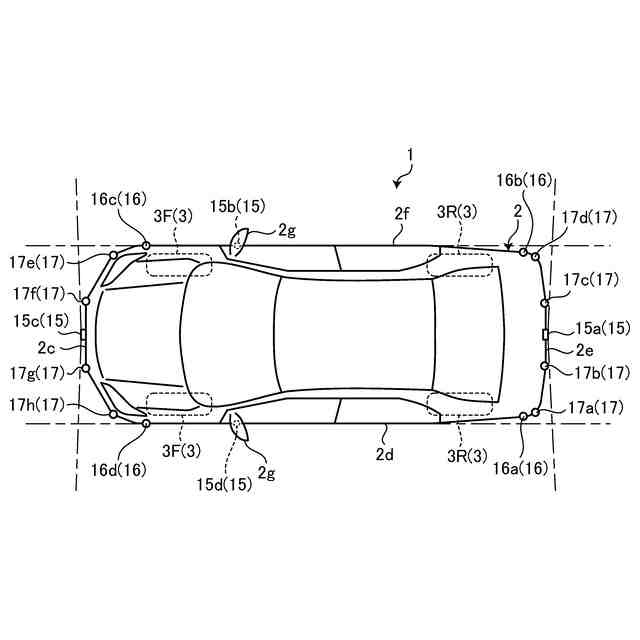
図2は、実施形態の車両の例示的な平面図(俯瞰図)である。
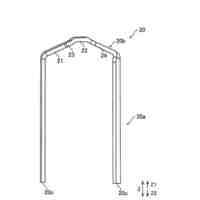
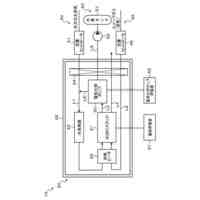
図3は、実施形態の車両のダッシュボードの一例の車両後方からの視野での図である。
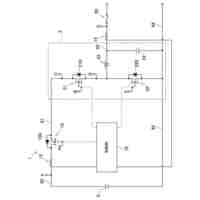
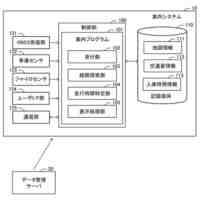
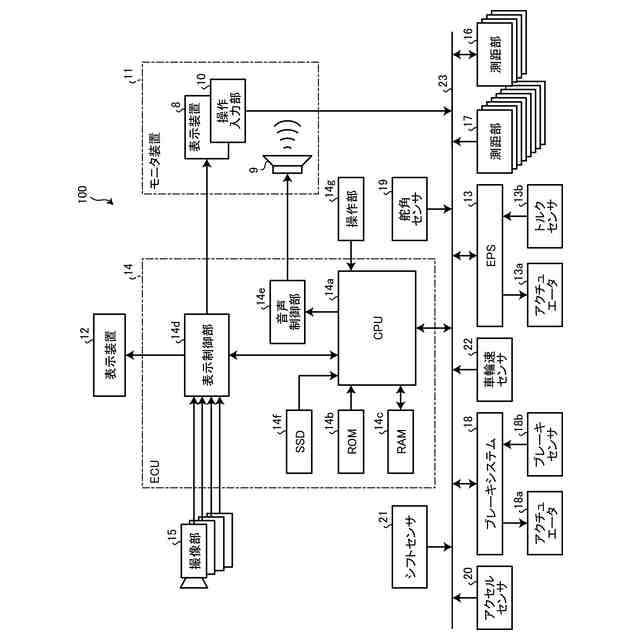
図4は、実施形態の車両制御システムの構成の例示的なブロック図である。
図5は、実施形態における操舵制御ブロック線図である。
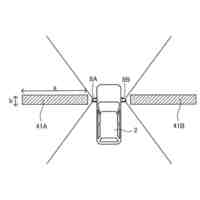
図6は、実施形態における目標経路の更新に関する説明図である。
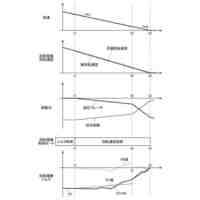
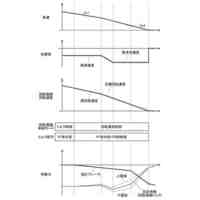
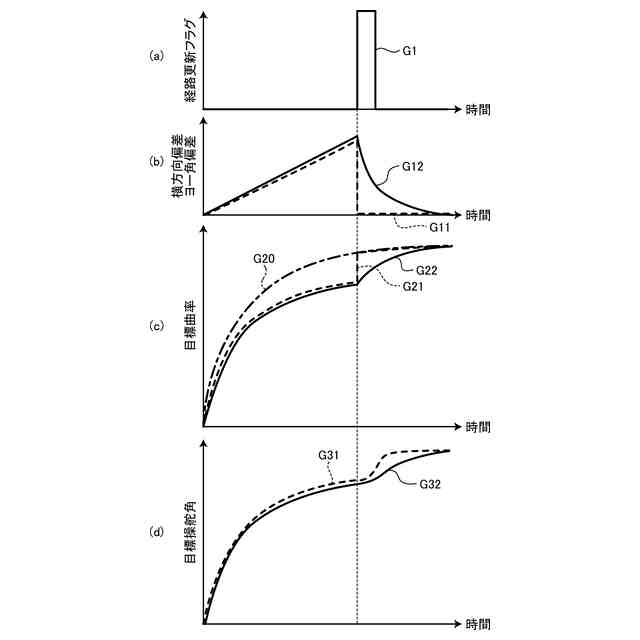
図7は、実施形態における各情報の時間的推移の例を示すグラフである。
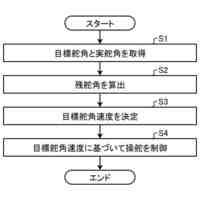
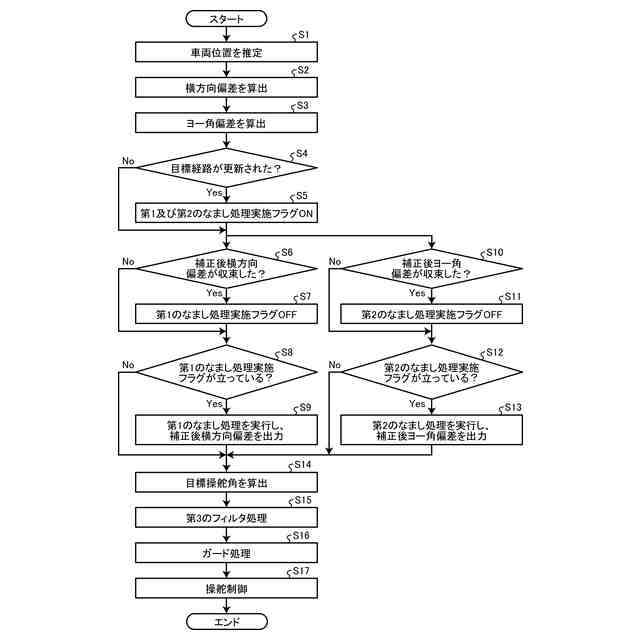
図8は、実施形態における操舵制御に関する処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の例示的な実施形態が開示される。以下に示される実施形態の構成、ならびに当該構成によってもたらされる作用、結果、および効果は、例である。本発明は、以下の実施形態に開示される構成以外によっても実現可能であるとともに、基本的な構成に基づく種々の効果や、派生的な効果のうちの少なくとも一つを得ることが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
車両
2日前
株式会社アイシン
車両
2日前
株式会社アイシン
ロータ
1か月前
株式会社アイシン
ロータ
1か月前
株式会社アイシン
熱交換器
2日前
株式会社アイシン
駆動装置
1か月前
株式会社アイシン
歯車機構
1か月前
株式会社アイシン
ステータ
1か月前
株式会社アイシン
ステータ
1か月前
株式会社アイシン
ステータ
1か月前
株式会社アイシン
ステータ
1か月前
株式会社アイシン
制御装置
1か月前
株式会社アイシン
制御装置
1か月前
株式会社アイシン
制御装置
1か月前
株式会社アイシン
熱交換器
2日前
株式会社アイシン
検知装置
1か月前
株式会社アイシン
電子機器
1か月前
株式会社アイシン
保護装置
1か月前
株式会社アイシン
レーダ装置
1か月前
株式会社アイシン
折り畳み装置
1か月前
株式会社アイシン
案内システム
1か月前
株式会社アイシン
環境認識装置
1か月前
株式会社アイシン
運転支援装置
1か月前
株式会社アイシン
折り畳み装置
1か月前
株式会社アイシン
衝撃吸収部材
1か月前
株式会社アイシン
牽引支援装置
1か月前
株式会社アイシン
牽引支援装置
1か月前
株式会社アイシン
電解システム
1か月前
株式会社アイシン
動力変換装置
2日前
株式会社アイシン
ドア支持装置
1か月前
株式会社アイシン
運転支援装置
1か月前
株式会社アイシン
運転支援装置
1か月前
株式会社アイシン
運転支援装置
1か月前
株式会社アイシン
運転支援装置
1か月前
株式会社アイシン
車両制御装置
1か月前
株式会社アイシン
ガス検出装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ