TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152088
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053824
出願日
2024-03-28
発明の名称
車両用制御装置
出願人
株式会社アイシン
代理人
弁理士法人R&C
主分類
B60L
9/18 20060101AFI20251002BHJP(車両一般)
要約
【課題】不連続なトルク指令に基づく回転電機の駆動制御によるエネルギー効率の向上と、駆動伝達機構に生じる振動の低減とを適切に実現する。
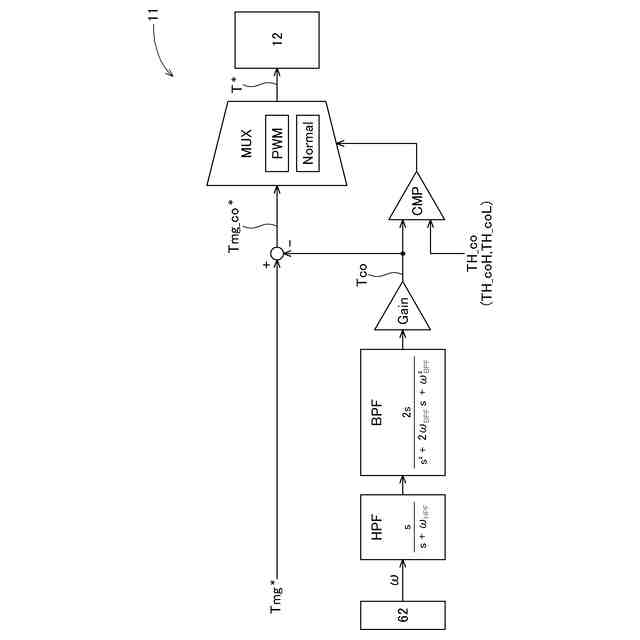
【解決手段】車両用制御装置のトルク指令生成部11は、駆動伝達機構の振動の大きさを表す振動指標Tcoに基づいて、制振トルクTcoを要求トルクTmg
*
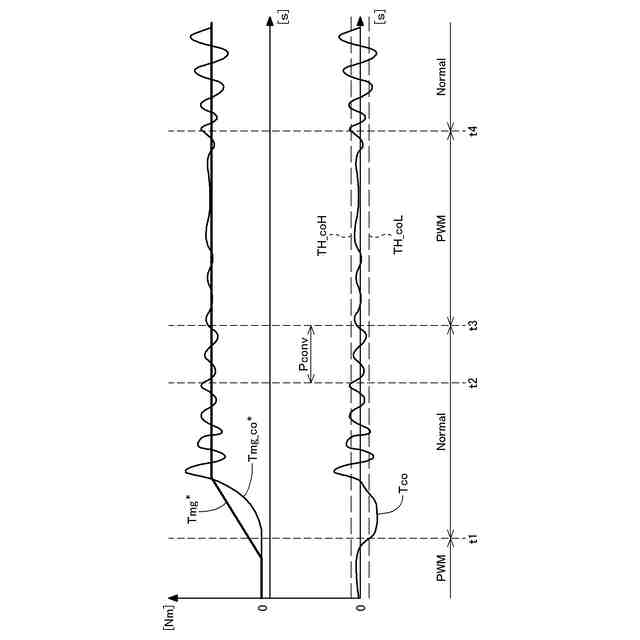
に加えると共に、不連続指令生成処理PWMと、通常指令生成処理Normalとを選択的に実行する。トルク指令生成部11は、不連続指令生成処理PWMの実行中に振動指標Tcoが第1閾値TH_co以上になった場合には、不連続指令生成処理PWMを終了して通常指令生成処理Normalを実行する。
【選択図】図7
特許請求の範囲
【請求項1】
車輪の駆動力源として回転電機を備えた車両を制御する車両用制御装置であって、
前記車輪に伝達することが要求されるトルクである要求トルクに基づいて、前記回転電機に当該要求トルクを出力させるための指令であるトルク指令を生成するトルク指令生成部を備え、
前記トルク指令生成部は、
前記回転電機の駆動力を前記車輪に伝達する駆動伝達機構の振動の大きさを表す振動指標に基づいて、前記駆動伝達機構の振動に対して逆位相のトルクを前記回転電機に出力させる制振トルクを前記要求トルクに加えると共に、
不連続な指令値を前記トルク指令として生成する不連続指令生成処理と、
連続的に変化する指令値を前記トルク指令として生成する通常指令生成処理と、を選択的に実行し、
前記トルク指令生成部は、前記不連続指令生成処理の実行中に前記振動指標が予め規定された第1閾値以上になった場合には、前記不連続指令生成処理を終了して前記通常指令生成処理を実行する、車両用制御装置。
続きを表示(約 710 文字)
【請求項2】
前記トルク指令生成部は、前記通常指令生成処理の実行中に、前記振動指標が前記第1閾値以下に設定された第2閾値未満となった場合、前記振動指標が前記第2閾値未満となった時点から予め規定された待機時間の経過後に前記通常指令生成処理を終了して前記不連続指令生成処理を実行する、請求項1に記載の車両用制御装置。
【請求項3】
前記トルク指令生成部は、前記不連続指令生成処理において、予め規定されたキャリア周期内で、前記キャリア周期よりも短い制御周期に基づいて規定される切り替えタイミングでオン状態とオフ状態とが切り替わるパルス幅変調波形として前記トルク指令を生成するものであり、
前記トルク指令生成部は、前記キャリア周期内の基準タイミングにおける前記要求トルク及び前記制振トルクに応じて、前記パルス幅変調波形のデューティを前記キャリア周期ごとに決定する、請求項1又は2に記載の車両用制御装置。
【請求項4】
前記トルク指令生成部は、前記不連続指令生成処理において、予め規定されたキャリア周期内で、前記キャリア周期よりも短い制御周期に基づいて規定される切り替えタイミングでオン状態とオフ状態とが切り替わるパルス幅変調波形として前記トルク指令を生成するものであり、
前記トルク指令生成部は、前記回転電機の回転速度に応じて設定され、前記回転電機の効率が予め定められた規定値よりも高い動作範囲である高効率範囲内となるトルクを、前記パルス幅変調波形がオン状態の前記トルク指令の値とし、ゼロを前記パルス幅変調波形がオフ状態の値とする、請求項1又は2に記載の車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特開平10-243680号公報には、指定された要求トルクに平均値が一致し、波高値が回転電機を高効率で駆動することができるトルク値に一致する不連続なトルク指令(パルス状のトルク指令)に基づいて回転電機を駆動制御する制御装置が開示されている。要求トルクに拘わらず、効率の良い動作領域において回転電機を駆動することができるので、回転電機を高いエネルギー効率で動作させることができる。従って、ハイブリッド車両や電動車両における電力消費率(電費)の向上が期待できる。
【先行技術文献】
【特許文献】
【0003】
特開平10-243680号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
回転電機の出力トルクには、車両を走行させる駆動トルクの他に、ドライブシャフトなど、回転電機から車輪への駆動伝達機構に生じる振動を低減させる制振トルクが含まれる場合がある。制振トルクは、駆動伝達機構に生じる振動成分に対する逆位相のトルクである。このトルクを駆動トルクに重畳させることによって、回転電機の出力トルクによって当該振動を低減させつつ車両を走行させ、乗員に良好な乗り心地を提供することができる。但し、パルス状の不連続なトルク指令と、通常の連続的なトルク指令とを比べると、通常のトルク指令の方がトルク指令に基づく回転電機制御の応答性はよい。制振トルクの周波数は、パルス状のトルク指令の周期(いわゆるキャリア周期)に比べて高いことが多い。このため、制振トルクが回転電機の出力トルクとして出力される際に、応答の遅れから、トルク指令における制振トルクの位相と、出力トルクの位相とがずれる場合がある。そして、このような位相ずれが生じると、制振性能の低下や、振動の増幅につながる場合がある。
【0005】
そこで、不連続なトルク指令に基づく回転電機の駆動制御によるエネルギー効率の向上と、駆動伝達機構に生じる振動の低減とを適切に実現することが望まれる。
【課題を解決するための手段】
【0006】
上記に鑑みた車両用制御装置は、車輪の駆動力源として回転電機を備えた車両を制御する車両用制御装置であって、前記車輪に伝達することが要求されるトルクである要求トルクに基づいて、前記回転電機に当該要求トルクを出力させるための指令であるトルク指令を生成するトルク指令生成部を備え、前記トルク指令生成部は、前記回転電機の駆動力を前記車輪に伝達する駆動伝達機構の振動の大きさを表す振動指標に基づいて、前記駆動伝達機構の振動に対して逆位相のトルクを前記回転電機に出力させる制振トルクを前記要求トルクに加える制振処理を実行すると共に、不連続な指令値を前記トルク指令として生成する不連続指令生成処理と、連続的に変化する指令値を前記トルク指令として生成する通常指令生成処理と、を選択的に実行し、前記トルク指令生成部は、前記不連続指令生成処理の実行中に前記振動指標が予め規定された第1閾値以上になった場合には、前記不連続指令生成処理を終了して前記通常指令生成処理を実行する。
【0007】
本構成によれば、振動指標が第1閾値以上となると、トルク指令の生成処理が、不連続指令生成処理から通常指令生成処理へと切り替えられる。そのため、制振制御を実行する場合に、不連続な指令値をトルク指令として回転電機を駆動制御することに起因して、制振処理の効果が適切に得られなくなることを抑制することができる。例えば、制振制御による振動の低減が不十分になったり、却って振動が増加したりする可能性を低減し、適切な制振制御を行い易くなる。また、本構成によれば、振動指標が第1閾値未満のとき、即ち、駆動伝達機構の振動が比較的小さい場合には、不連続指令生成処理により生成されたトルク指令を用いて回転電機を駆動制御することにより、回転電機を間欠動作させて車両のエネルギー効率を高めることが可能となる。即ち、本構成によれば、不連続なトルク指令に基づく回転電機の駆動制御によるエネルギー効率の向上と、駆動伝達機構に生じる振動の低減とを適切に実現することができる。
【0008】
車両用制御装置のさらなる特徴と利点は、図面を参照して説明する例示的且つ非限定的な実施形態についての以下の記載から明確となる。
【図面の簡単な説明】
【0009】
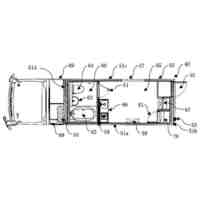
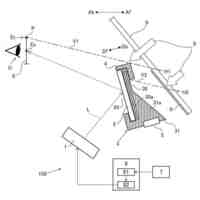
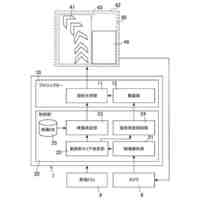
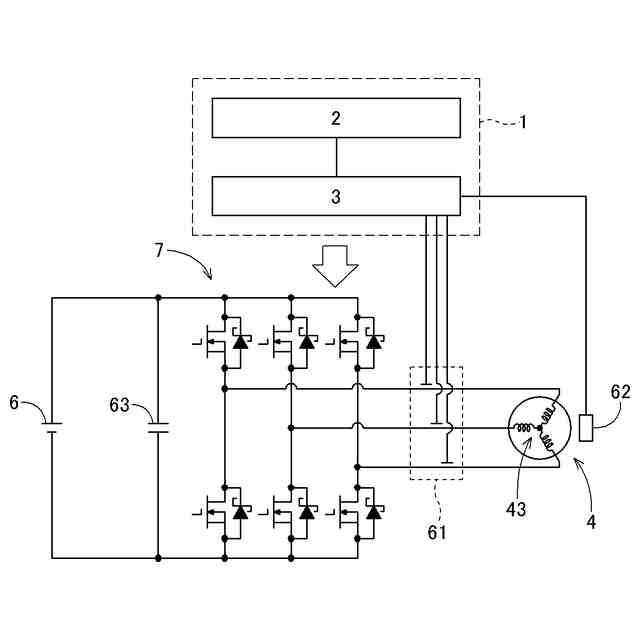
回転電機の駆動制御システムの一例を示す模式的ブロック図
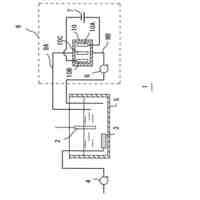
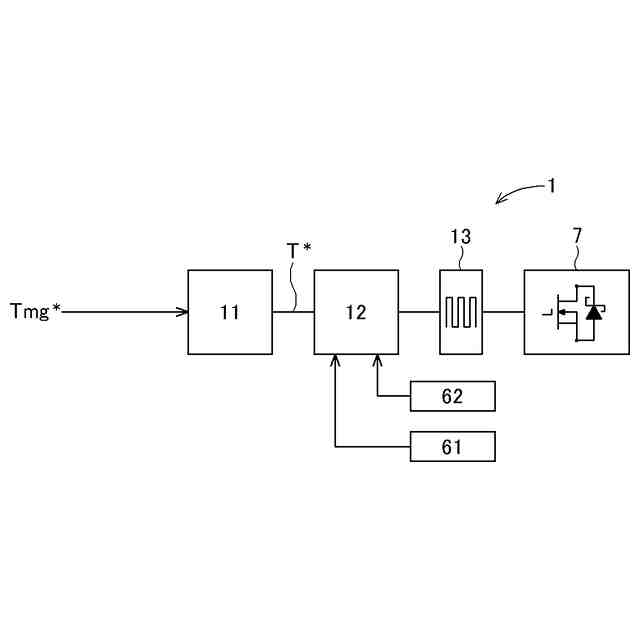
インバータを介した回転電機の模式的制御ブロック図
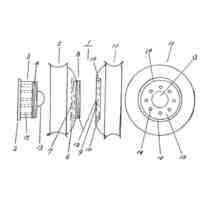
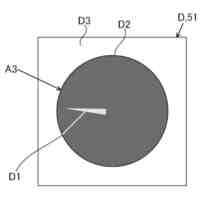
回転電機と車輪との間の駆動伝達機構の一例を模式的に示す図
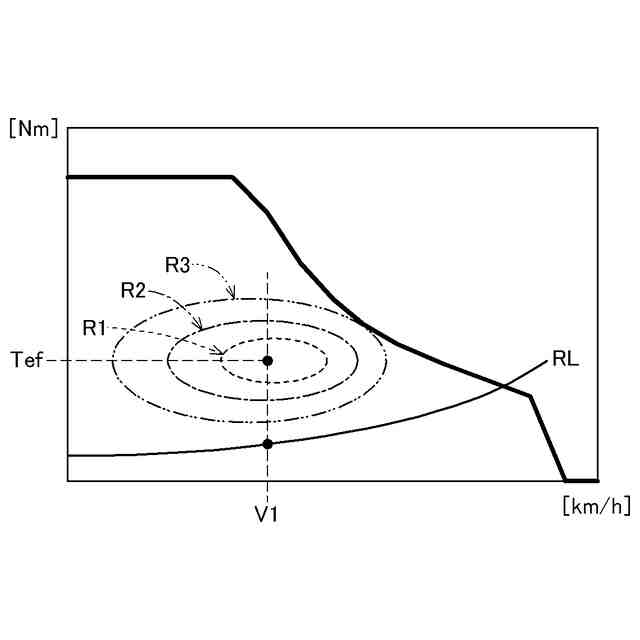
回転電機の動作範囲を回転速度とトルクとの関係で示す図
通常の連続的なトルク指令と不連続なトルク指令との関係を示す図
制振トルクと、制振トルクを含むトルク指令と、トルク指令生成処理の種別との関係の一例を示すタイムチャート
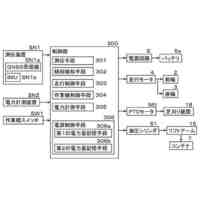
回転数フィードバック制振制御器を含むトルク指令生成部の一例を示す制御ブロック図
PWM指令生成処理と通常指令生成処理とを切り替える手順の一例を示すフローチャート
【発明を実施するための形態】
【0010】
以下、車両用制御装置の実施形態を図面も参照して説明する。図1の模式的ブロック図は、回転電機4の駆動制御システムの一例を示している。図2の模式的制御ブロック図は、インバータ7を介した回転電機4の制御形態の一例を示している。図3は、回転電機4と車輪Wとの間の駆動伝達機構5の一例を模式的に示している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ドアロック装置
18日前
株式会社豊田中央研究所
非接触給電可能な回転電機
18日前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
4日前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
6日前
株式会社アイシン
ペロブスカイト太陽電池及びペロブスカイト太陽電池の製造方法
10日前
ミクロエース株式会社
被覆銅材の剥離処理方法、処理装置、処理装置制御部およびプログラム
4日前
個人
前輪キャスター
2か月前
個人
上部一体型自動車
1か月前
個人
タイヤ脱落防止構造
2か月前
個人
ルーフ付きトライク
2か月前
個人
空間形成装置
4日前
個人
マスタシリンダ
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
個人
常設収納型サンバイザー
10日前
日本精機株式会社
車載表示装置
12日前
株式会社豊田自動織機
産業車両
3か月前
株式会社ニフコ
収納装置
1か月前
日本精機株式会社
画像投映装置
27日前
株式会社ニフコ
照明装置
2か月前
日本精機株式会社
車室演出装置
2か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
7日前
日本精機株式会社
車載表示装置
5日前
個人
回転窓ワイパー装置
4日前
日本精機株式会社
車両用投影装置
1か月前
日本精機株式会社
車両用報知装置
11日前
日本精機株式会社
車両用表示装置
27日前
株式会社SUBARU
車両
25日前
極東開発工業株式会社
車両
3か月前
日本精機株式会社
車両用投射装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
井関農機株式会社
作業車両
1か月前
個人
音による速度計とプログラム
10日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ