TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147817
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048249
出願日
2024-03-25
発明の名称
車両制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
B60W
30/02 20120101AFI20250930BHJP(車両一般)
要約
【課題】自車線の交通流に乗せて自車両を走行させる際の運転者の利便性の向上を図れる車両制御装置を提供する。
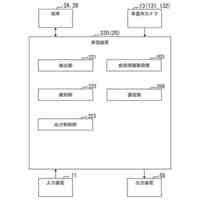
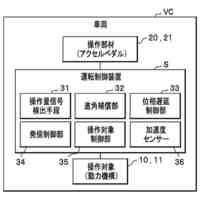
【解決手段】制御装置30は、車両1の周辺状況を認識する認識部31と、認識部31の認識結果に基づき、車両1が走行する自車線を有する道路における自車線の車線位置及び/又は車線種別を特定する特定部32と、認識部31の認識結果に基づき自車線における車両1の前方にカーブが検出された場合に、カーブの曲率に関する情報を取得する取得部33と、特定部32の特定結果と、取得部33によって取得された情報とに基づき、車両1の加減速を制御する走行制御部35と、を備える。走行制御部35は、自車線の車線位置及び/又は車線種別と、カーブの曲率とに応じた目標速度となるように、車両1の加減速を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
車両を制御する車両制御装置であって、
前記車両の周辺状況を認識する認識部と、
前記車両が走行する自車線を有する道路における前記自車線の車線位置及び/又は車線種別を特定する特定部と、
前記認識部の認識結果に基づき前記自車線における前記車両の前方にカーブが検出された場合に、前記カーブの曲率に関する情報を取得する取得部と、
前記特定部の特定結果と、前記取得部によって取得された情報とに基づき、前記車両の加減速を制御する走行制御部と、
を備え、
前記走行制御部は、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率とに応じた目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記特定部は、前記自車線の車線種別として、前記自車線が走行車線であるか追越車線であるかを特定し、
前記走行制御部は、前記自車線の車線種別が追越車線と特定された場合に、前記自車線の車線種別が走行車線と特定された場合と比べて、前記目標速度を高くする、
車両制御装置。
【請求項3】
請求項1に記載の車両制御装置であって、
前記道路は、幅方向における一方側に1又は複数の走行車線を有するとともに、前記幅方向における他方側に1又は複数の追越車線を有し、
前記特定部は、前記自車線の車線位置として、前記自車線が前記一方側又は前記他方側から何番目の車線であるかを特定し、
前記走行制御部は、前記自車線が前記他方側に近い車線であるほど、前記目標速度を高くする、
車両制御装置。
【請求項4】
請求項2又は3に記載の車両制御装置であって、
前記認識部は、前記自車線の幅員を含む前記周辺状況を認識し、
前記走行制御部は、前記特定部の特定結果と、前記取得部によって取得された情報と、前記認識部の認識結果とに基づき、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率と、前記自車線の幅員とに応じた前記目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
【請求項5】
請求項2又は3に記載の車両制御装置であって、
前記認識部は、前記自車線の近傍に存在する道路構造物を含む前記周辺状況を認識し、
前記走行制御部は、前記特定部の特定結果と、前記取得部によって取得された情報と、前記認識部の認識結果とに基づき、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率と、前記自車線の近傍に存在する道路構造物とに応じた前記目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
【請求項6】
請求項2又は3に記載の車両制御装置であって、
前記認識部は、前記車両の周辺の天候及び/又は前記自車線の路面状況を含む前記周辺状況を認識し、
前記走行制御部は、前記特定部の特定結果と、前記取得部によって取得された情報と、前記認識部の認識結果とに基づき、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率と、前記車両の周辺の天候及び/又は前記自車線の路面状況とに応じた前記目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
【請求項7】
請求項2又は3に記載の車両制御装置であって、
前記認識部は、前記道路において前記車両の周辺に存在する工事区間を含む前記周辺状況を認識し、
前記走行制御部は、前記特定部の特定結果と、前記取得部によって取得された情報と、前記認識部の認識結果とに基づき、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率と、前記工事区間の有無とに応じた前記目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
【請求項8】
請求項2又は3に記載の車両制御装置であって、
前記認識部は、前記道路において前記車両の周辺に存在する緊急車両を含む前記周辺状況を認識し、
前記走行制御部は、前記特定部の特定結果と、前記取得部によって取得された情報と、前記認識部の認識結果とに基づき、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率と、前記緊急車両の有無とに応じた前記目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
【請求項9】
請求項2又は3に記載の車両制御装置であって、
前記認識部は、前記道路において前記車両の周辺に存在する合流、分岐、インターチェンジ、ジャンクション、又は料金所を含む前記周辺状況を認識し、
前記走行制御部は、前記特定部の特定結果と、前記取得部によって取得された情報と、前記認識部の認識結果とに基づき、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率と、前記合流、前記分岐、前記インターチェンジ、前記ジャンクション、又は前記料金所の有無とに応じた前記目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
【請求項10】
請求項2又は3に記載の車両制御装置であって、
前記認識部は、前記自車線の法定速度を含む前記周辺状況を認識し、
前記走行制御部は、前記特定部の特定結果と、前記取得部によって取得された情報と、前記認識部の認識結果とに基づき、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率と、前記自車線の法定速度とに応じた前記目標速度となるように、前記車両の加減速を制御する、
車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両を制御する車両制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、脆弱な立場にある交通参加者にも配慮した持続可能な輸送システムへのアクセスを提供するための取り組みが活発化している。この取り組みの1つとして、交通の安全性や利便性をより改善すべく、自動車などの車両における運転支援技術や自動運転技術に関する研究開発が行われている。
【0003】
運転支援技術の一例として、下記特許文献1には、自車両が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速の加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度を設定するようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2012-066758号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術では、自車線の交通流に乗せて自車両を走行させる際の運転者の利便性を向上させる観点で、改善の余地があった。
【0006】
本発明は、自車線の交通流に乗せて自車両を走行させる際の運転者の利便性の向上を図れる車両制御装置を提供する。そして、延いては、交通の安全性を改善し、持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0007】
本発明の一態様は、
車両を制御する車両制御装置であって、
前記車両の周辺状況を認識する認識部と、
前記車両が走行する自車線を有する道路における前記自車線の車線位置及び/又は車線種別を特定する特定部と、
前記認識部の認識結果に基づき前記自車線における前記車両の前方にカーブが検出された場合に、前記カーブの曲率に関する情報を取得する 取得部と、
前記特定部の特定結果と、前記取得部によって取得された情報とに基づき、前記車両の加減速を制御する走行制御部 と、
を備え、
前記走行制御部は、前記自車線の車線位置及び/又は車線種別と、前記カーブの曲率とに応じた目標速度となるように、前記車両の加減速を制御する、
車両制御装置である。
【発明の効果】
【0008】
本発明によれば、自車線の交通流に乗せて自車両を走行させる際の運転者の利便性の向上を図れる車両制御装置を提供できる。
【図面の簡単な説明】
【0009】
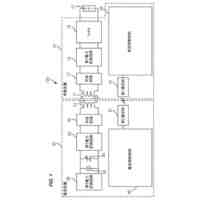
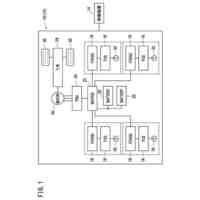
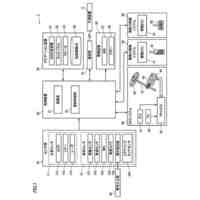
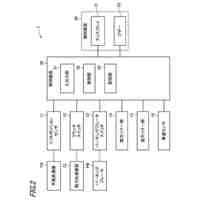
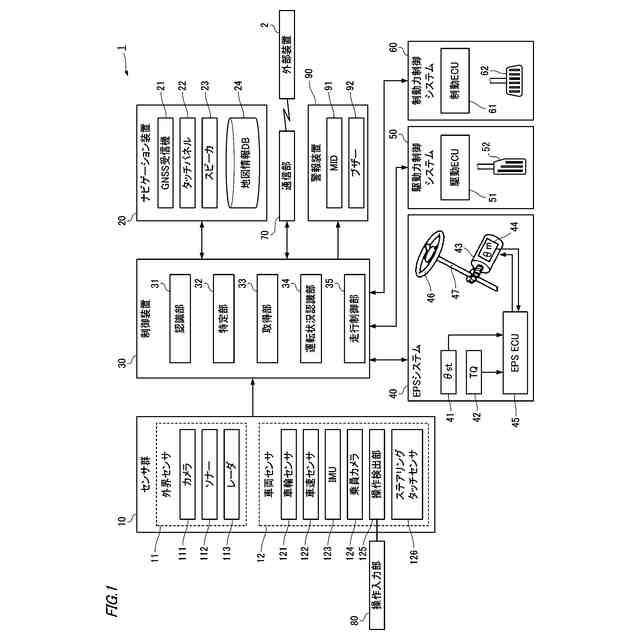
本実施形態の制御装置30を備える車両1の概略構成を示すブロック図である。
制御装置30が参照する目標速度テーブルTb1の一例を示す図である。
制御装置30による車両1の制御の一例を示す図である。
制御装置30による車両1の制御の他の一例を示す図である。
制御装置30が参照する目標速度補正テーブルTb2の一例を示す図である。
制御装置30が実行する処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の車両制御装置の一実施形態について、図面を参照しながら説明する。以下の実施形態は本発明を限定するものではなく、以下の実施形態で説明する要素のすべてが本発明に必須のものとは限らない。また、本発明の趣旨を逸脱しない範囲において、以下の実施形態で説明する2以上の要素を任意に組み合わせてもよい。なお、以下では、同一又は類似の要素には同一又は類似の符号を付して、その説明を省略又は簡略化することがある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
装置
11日前
本田技研工業株式会社
車両
12日前
本田技研工業株式会社
モータ
8日前
本田技研工業株式会社
内燃機関
11日前
本田技研工業株式会社
受電装置
6日前
本田技研工業株式会社
内燃機関
11日前
本田技研工業株式会社
通知装置
11日前
本田技研工業株式会社
保持装置
5日前
本田技研工業株式会社
車両構造
8日前
本田技研工業株式会社
車両構造
8日前
本田技研工業株式会社
送電装置
6日前
本田技研工業株式会社
切断装置
4日前
本田技研工業株式会社
断続装置
6日前
本田技研工業株式会社
電解装置
19日前
本田技研工業株式会社
バッテリ
5日前
本田技研工業株式会社
バッテリ
5日前
本田技研工業株式会社
ステータ
4日前
本田技研工業株式会社
固体電池
6日前
本田技研工業株式会社
保管装置
6日前
本田技研工業株式会社
保管装置
6日前
本田技研工業株式会社
会話装置
4日前
本田技研工業株式会社
リンク機構
4日前
本田技研工業株式会社
鞍乗型車両
18日前
本田技研工業株式会社
リアクトル
11日前
本田技研工業株式会社
分離システム
8日前
本田技研工業株式会社
運転制御装置
8日前
本田技研工業株式会社
電源システム
6日前
本田技研工業株式会社
車両制御装置
12日前
本田技研工業株式会社
潤滑システム
6日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
放電処理方法
6日前
本田技研工業株式会社
車両制御装置
18日前
本田技研工業株式会社
クラッチ装置
27日前
本田技研工業株式会社
潤滑システム
18日前
本田技研工業株式会社
鞍乗り型車両
4日前
本田技研工業株式会社
車両制御装置
20日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ