TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145037
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045009
出願日
2024-03-21
発明の名称
把持検知システム
出願人
豊田合成株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B62D
1/04 20060101AFI20250926BHJP(鉄道以外の路面車両)
要約
【課題】把持検知システムにおいて、運転者によってハンドルの把持が検出されないことを抑制する技術を提供する。
【解決手段】把持検知システム10であって、移動体のステアリング装置11に設けられ、移動体の運転者DRに把持される把持部を有する操舵部100と、情報を出力する出力部と、運転者による把持部の把持に応じて変化する測定値を取得する第1取得部であって、測定値を取得できる1以上の取得範囲を把持部において有する第1取得部と、把持に応じて変化した測定値が判定範囲に含まれない場合に、把持部が把持されていないことを表す出力を出力部に行わせる制御部と、を備え、制御部は、把持に応じて変化した測定値の実績に基づいて判定範囲を設定する、把持検知システム。
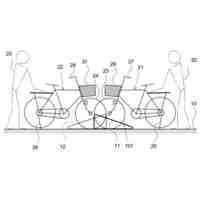
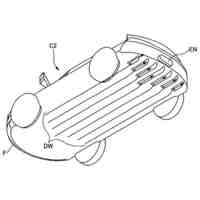
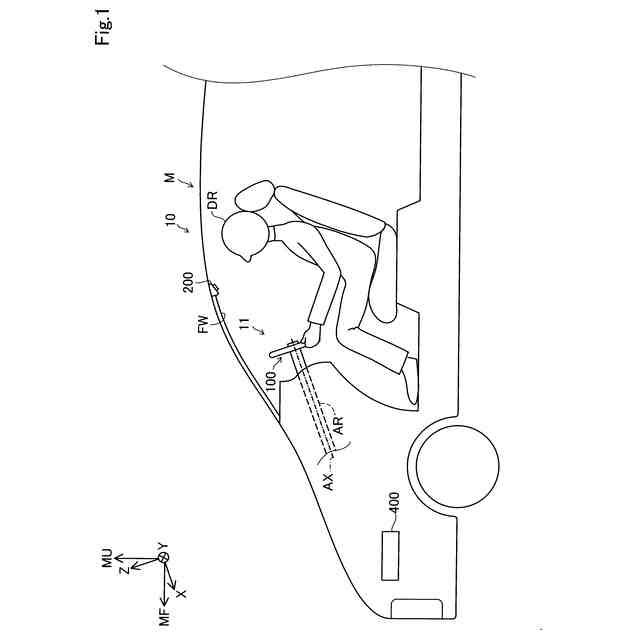
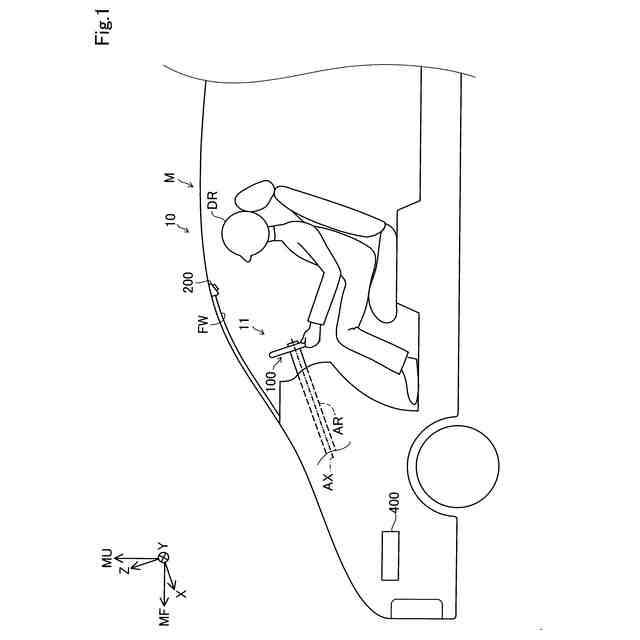
【選択図】図1
特許請求の範囲
【請求項1】
把持検知システムであって、
移動体のステアリング装置に設けられ、前記移動体の運転者に把持される把持部を有する操舵部と、
情報を出力する出力部と、
前記運転者による前記把持部の把持に応じて変化する測定値を取得する第1取得部であって、前記測定値を取得できる1以上の取得範囲を前記把持部において有する第1取得部と、
前記把持に応じて変化した測定値が判定範囲に含まれない場合に、前記把持部が把持されていないことを表す出力を前記出力部に行わせる制御部と、を備え、
前記制御部は、
前記把持に応じて変化した測定値の実績に基づいて前記判定範囲を設定する、把持検知システム。
続きを表示(約 970 文字)
【請求項2】
請求項1記載の把持検知システムであって、さらに、
前記運転者を表す運転者情報を取得する第2取得部を備え、
前記制御部は、
前記運転者情報と対応づけて前記測定値の実績を記憶することにより、前記判定範囲として使用できる複数の候補範囲を記憶し、
前記複数の候補範囲のうち、前記第2取得部により取得された運転者情報に応じた候補範囲を前記判定範囲として設定する、把持検知システム。
【請求項3】
請求項1記載の把持検知システムであって、
前記第1取得部は、静電容量センサである、把持検知システム。
【請求項4】
請求項1記載の把持検知システムであって、
前記操舵部は、前記移動体の運転において、前記運転者により回転させられ、
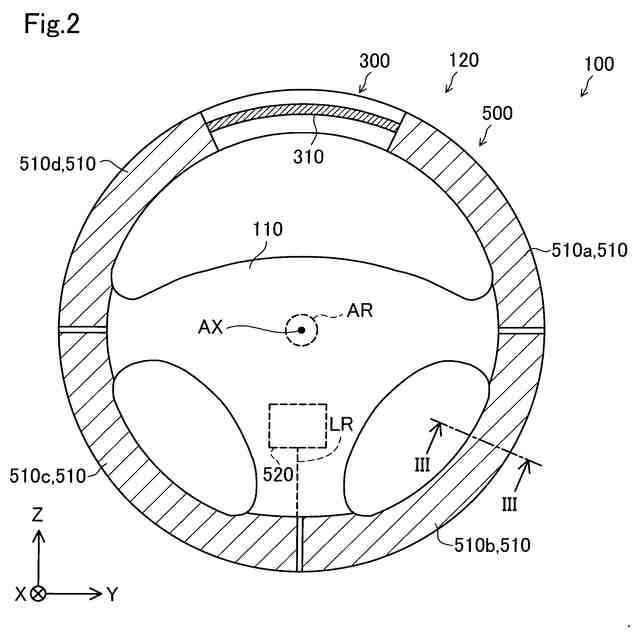
前記1以上の取得範囲は、4つ以上の範囲であって、前記操舵部の回転軸を挟んで左右対称に配されている、把持検知システム。
【請求項5】
請求項1記載の把持検知システムであって、さらに、
前記移動体の使用される環境に係わる環境情報を取得する第3取得部を備え、
前記制御部は、
前記環境情報と対応づけて前記測定値の実績を記憶することにより、前記判定範囲として使用できる複数の候補範囲を記憶し、
前記複数の候補範囲のうち、前記第3取得部により取得された環境情報に応じた候補範囲を前記判定範囲として設定する、把持検知システム。
【請求項6】
把持検知システムであって、
移動体のステアリング装置に設けられ、前記移動体の運転者に把持される把持部を有する操舵部と、
情報を出力する出力部と、
前記運転者による前記把持部の把持に応じて変化した1種以上の測定値を取得する第1取得部であって、前記1種以上の測定値を取得できる複数の取得範囲を前記把持部において有する第1取得部と、
前記把持に応じて変化した測定値が判定範囲に含まれない場合に、前記把持部が把持されていないことを表す出力を前記出力部に行わせる制御部と、を備え、
前記制御部は、
前記把持に応じて変化した測定値の実績に基づいて前記判定範囲を設定する、把持検知システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、把持検知システムに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
車両のハンドルにおいて、例えば、特許文献1に記載されているように、運転者がハンドルを把持しているか否かを検出する把持検知システムが存在する。把持検知システムは、例えば、LTA(Lane Tracing Assist:車線逸脱防止支援システム)やLCA(Lane Change Assist:車線変更支援システム)を含む高度運転支援システムの作動中に、運転者にハンドルの把持を要求させるために用いられる。
【0003】
特許文献1の把持検知システムは、静電容量センサをハンドルに備えている。特許文献1の把持検知システムは、運転者がハンドルを把持することによる静電容量の変化に基づいて、運転者がハンドルを把持しているか否かを検知する。
【先行技術文献】
【特許文献】
【0004】
特開2022-148335号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、ハンドルが把持される際に生じる静電容量は、ハンドルを把持する運転者によって異なる。より具体的には、手が比較的に小さい人や握力が比較的に弱い人がハンドルを把持する場合では、静電容量の変化量が小さくなる。したがって、従来の把持検知システムでは、手が比較的に小さい人や握力が比較的に弱い人が運転者の場合、ハンドルが把持されているにも拘わらず、ハンドルの把持が検出されない虞がある。
【0006】
よって、把持検知システムにおいて、運転者によってハンドルの把持が検出されないことを抑制する技術が求められていた。
【課題を解決するための手段】
【0007】
本開示は、以下の形態として実現することが可能である。
【0008】
(1)本開示の第1の形態によれば、把持検知システムが提供される。前記把持検知システムは、移動体のステアリング装置に設けられ、前記移動体の運転者に把持される把持部を有する操舵部と、情報を出力する出力部と、前記運転者による前記把持部の把持に応じて変化する測定値を取得する第1取得部であって、前記測定値を取得できる1以上の取得範囲を前記把持部において有する第1取得部と、前記把持に応じて変化した測定値が判定範囲に含まれない場合に、前記把持部が把持されていないことを表す出力を前記出力部に行わせる制御部と、を備え、前記制御部は、前記把持に応じて変化した測定値の実績に基づいて前記判定範囲を設定する。
このような形態とすることで、本開示の把持検知システムは、測定値の実績に基づいて、判定範囲を設定する。移動体は、特定の運転者に運転される場合がある。このため、測定値の実績には、特定の運転者の特徴に応じた傾向が表われやすい。よって、本開示の把持検知システムは、運転者が異なることにより把持部の把持が検知されない場合が生じることを抑制できる。
(2)上記形態において、前記把持検知システムは、さらに、前記運転者を表す運転者情報を取得する第2取得部を備え、前記制御部は、前記運転者情報と対応づけて前記測定値の実績を記憶することにより、前記判定範囲として使用できる複数の候補範囲を記憶し、前記複数の候補範囲のうち、前記第2取得部により取得された運転者情報に応じた候補範囲を前記判定範囲として設定してもよい。
このような形態とすることで、本開示の把持検知システムは、運転者を表す運転者情報を取得することにより、運転者ごとに判定範囲を設定できる。
(3)上記形態において、前記第1取得部は、静電容量センサでもよい。
このような形態とすることで、第1取得部は、運転者の手の大きさや握力に応じて、異なる静電容量を取得できる。よって、本開示の把持検知システムは、判定範囲を運転者ごとに設定しやすくなる。
(4)上記形態において、前記操舵部は、前記移動体の運転において、前記運転者により回転させられ、前記1以上の取得範囲は、4つ以上の範囲であって、前記操舵部の回転軸を挟んで左右対称に配されていてもよい。
このような形態とすることで、本開示の把持検知システムは、運転者の把持する位置に応じて、判定範囲を設定する。よって、本開示の把持検知システムは、運転者ごとに判定範囲を設定できる可能性が高い。
(5)上記形態において、前記把持検知システムは、さらに、前記移動体の使用される環境に係わる環境情報を取得する第3取得部を備え、前記制御部は、前記環境情報と対応づけて前記測定値の実績を記憶することにより、前記判定範囲として使用できる複数の候補範囲を記憶し、前記複数の候補範囲のうち、前記第3取得部により取得された環境情報に応じた候補範囲を前記判定範囲として設定してもよい。
このような形態とすることで、環境情報に対応づけられた複数の候補範囲が記憶される。環境情報と対応づけて記憶されている候補範囲は、運転者ごとに設定される可能性が高い。よって、本開示の把持検知システムは、運転者ごとの環境情報に応じて、判定範囲を設定できる。
(6)本開示の第2の形態によれば、把持検知システムが提供される。前記把持検知システムは、移動体のステアリング装置に設けられ、前記移動体の運転者に把持される把持部を有する操舵部と、情報を出力する出力部と、前記運転者による前記把持部の把持に応じて変化した1種以上の測定値を取得する第1取得部であって、前記1種以上の測定値を取得できる複数の取得範囲を前記把持部において有する第1取得部と、前記把持に応じて変化した測定値が判定範囲に含まれない場合に、前記把持部が把持されていないことを表す出力を前記出力部に行わせる制御部と、を備え、前記制御部は、前記把持に応じて変化した測定値の実績に基づいて前記判定範囲を設定する。
このような形態とすることで、本開示の把持検知システムは、測定値の実績に基づいて、判定範囲を設定する。移動体は、特定の運転者に運転される場合がある。このため、測定値の実績には、特定の運転者の特徴に応じた傾向が表われやすい。よって、本開示の把持検知システムは、運転者が異なることにより把持部の把持が検知されない場合が生じることを抑制できる。
【図面の簡単な説明】
【0009】
第1実施形態の把持検知システムを示す説明図である。
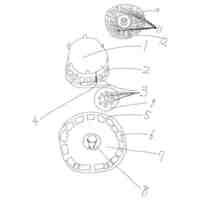
操舵部を示す説明図である。
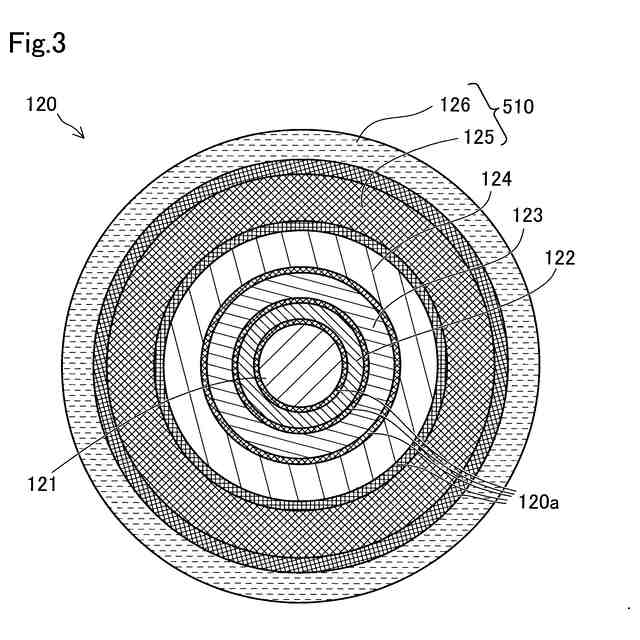
図2のIII-III断面図である。
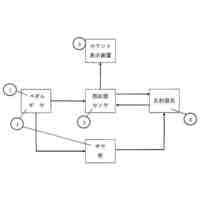
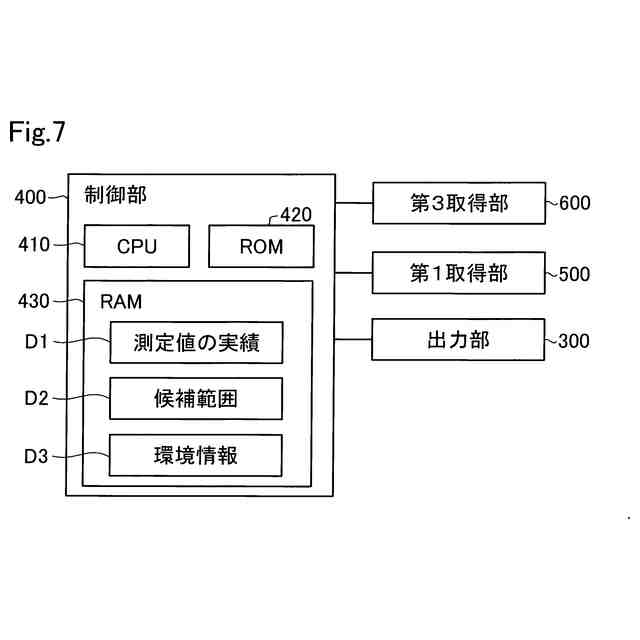
第1実施形態の制御部の構成を表すブロック図である。
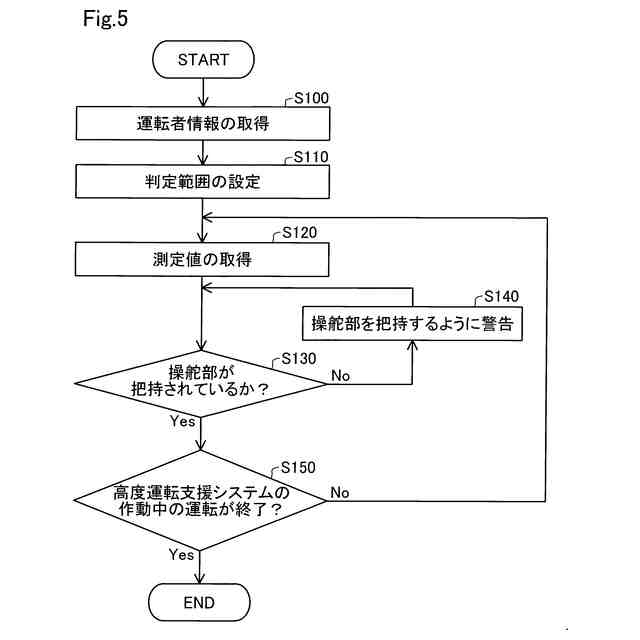
第1実施形態の把持の要求方法を示すフローチャートである。
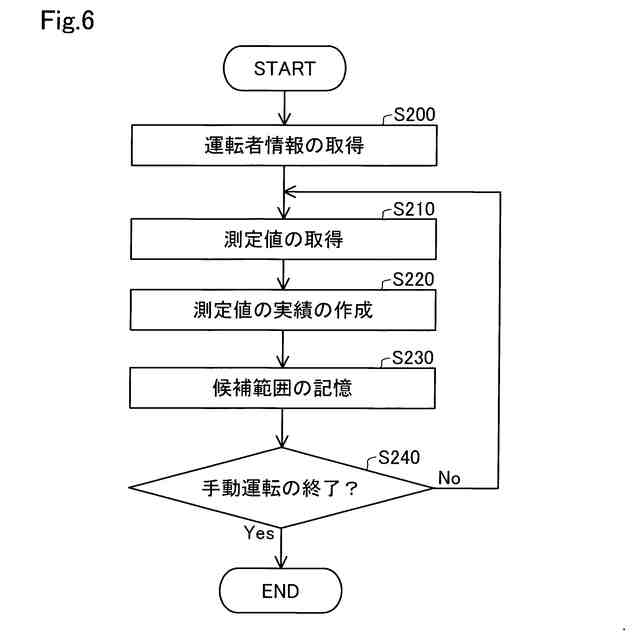
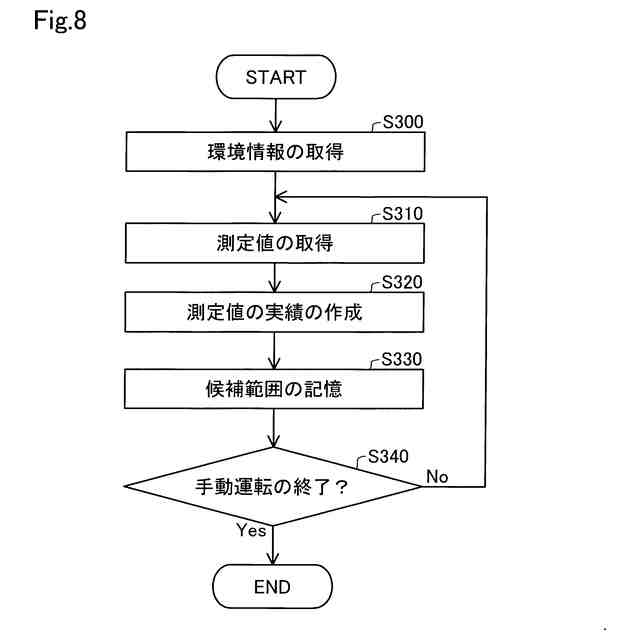
第1実施形態の候補範囲の学習方法を示すフローチャートである。
第4実施形態の制御部の構成を表すブロック図である。
第4実施形態の候補範囲の学習方法を示すフローチャートである。
第4実施形態の把持の要求方法を示すフローチャートである。
【発明を実施するための形態】
【0010】
A.第1実施形態:
A-1.システムの構成:
図1は、第1実施形態の把持検知システム10を示す説明図である。把持検知システム10は、例えば、高度運転支援システムを備えている車両Mに設けられる。高度運転支援システムは、LTA(Lane Tracing Assist:車線逸脱防止支援システム)、LCA(Lane Change Assist:車線変更支援システム)、運転者DRの操作を必要としない自動運転なども含む。なお、本明細書において、手動運転とは、高度運転支援システムが作動していない状態において運転者DRが車両Mを操作することを意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
3か月前
個人
走行装置
4か月前
個人
三輪バイク
9日前
個人
乗り物
5か月前
個人
電動走行車両
4か月前
個人
駐輪設備
1か月前
個人
自転車用歩数計
17日前
個人
折り畳み自転車
11か月前
個人
電動モビリティ
8か月前
個人
閂式ハンドル錠
4か月前
個人
発音装置
7か月前
個人
ボギー・フレーム
2か月前
個人
体重掛けリフト台車
11か月前
個人
“zen-go.”
3か月前
個人
自由方向乗車自転車
8か月前
個人
三輪電動車両
17日前
個人
ルーフ付きトライク
3か月前
個人
ルーフ付きトライク
2か月前
個人
キャンピングトライク
9か月前
個人
自転車用荷物台
11か月前
井関農機株式会社
作業車両
2日前
個人
パワーアシスト自転車
2か月前
個人
ステアリングの操向部材
9か月前
株式会社三五
リアサブフレーム
11か月前
個人
フロントフットブレーキ。
4か月前
株式会社豊田自動織機
産業車両
5か月前
豊田鉄工株式会社
小型車両
3か月前
学校法人千葉工業大学
車両
10か月前
個人
乗用自動車のディフューザー
1か月前
個人
ホイールハブ駆動構造
4か月前
学校法人千葉工業大学
車両
10か月前
学校法人千葉工業大学
車両
10か月前
コンビ株式会社
乳母車
25日前
個人
折り畳み作業机搭載の変型台車
1か月前
株式会社クボタ
作業車
6か月前
株式会社オカムラ
搬送用什器
8か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ