TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025144413
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024044170
出願日
2024-03-19
発明の名称
建物の内部を3次元計測するために計測位置を演算処理するための前処理方法、プログラム、及び前処理装置
出願人
株式会社フジタ
,
株式会社セック
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
G01C
15/00 20060101AFI20250925BHJP(測定;試験)
要約
【課題】既存の建物の内部を3次元計測する際に、効率的に計測位置を選定して演算処理に要する計算負荷を低減する前処理方法、プログラム、または前処理装置を提供する。
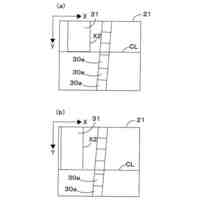
【解決手段】建物の内部を3Dスキャナを用いて3次元計測するために計測位置を演算処理するための前処理方法であって、建物の建築図面から計測対象範囲及び障害物の位置情報を含む2次元データを取得し、2次元データに基づいて、計測対象範囲及び障害物の位置を特徴付ける複数の頂点を抽出して、複数の頂点のうち、互いに隣接する頂点を結ぶ線分を導出し、線分を、3Dスキャナが計測可能な単位に基づいて分割することをコンピュータが実行する。
【選択図】図3
特許請求の範囲
【請求項1】
建物の内部を3Dスキャナを用いて3次元計測するために計測位置を演算処理するための前処理方法であって、
前記建物の建築図面から計測対象範囲及び障害物の位置情報を含む2次元データを取得し、
前記2次元データに基づいて、前記計測対象範囲及び前記障害物の位置を特徴付ける複数の頂点を抽出して、前記複数の頂点のうち、互いに隣接する頂点を結ぶ線分を導出し、
前記線分を、前記3Dスキャナが計測可能な単位に基づいて分割することをコンピュータが実行する前処理方法。
続きを表示(約 900 文字)
【請求項2】
前記線分を、前記3Dスキャナが計測可能な最小単位len
min
で分割する、請求項1に記載の前処理方法。
【請求項3】
前記最小単位len
min
は、前記線分と前記3Dスキャナの計測位置との距離をX
min
で表し、前記3Dスキャナから出射される赤外光が前記線分に入射する角度θが最小となる角度θ
min
とで表したときに、式(1)で表される、請求項2に記載の前処理方法。
JPEG
2025144413000009.jpg
20
98
【請求項4】
請求項1乃至3のいずれか一項に記載の前処理方法を、コンピュータに実行させるためのプログラム。
【請求項5】
建物の内部を3Dスキャナを用いて3次元計測するために計測位置を演算処理するための前処理装置であって、
前記建物の建築図面から計測対象範囲及び障害物の位置情報を含む2次元データを取得する取得部と、
前記2次元データに基づいて、前記計測対象範囲及び前記障害物の位置を特徴付ける複数の頂点を抽出して、前記複数の頂点のうち、互いに隣接する頂点を結ぶ線分を導出する導出部と、
前記線分を、前記3Dスキャナが計測可能な単位に基づいて分割する分割部と、を含む、前処理装置。
【請求項6】
前記分割部は、前記線分を前記3Dスキャナが計測可能な最小単位len
min
に分割することを含む、請求項5に記載の前処理装置。
【請求項7】
前記最小単位len
min
は、前記線分と前記3Dスキャナの計測位置との距離をX
min
と、前記3Dスキャナから出射される赤外光が前記線分に入射する角度θが最小となる角度θ
min
とすると、式(1)で表される、請求項6に記載の前処理装置。
JPEG
2025144413000010.jpg
20
98
発明の詳細な説明
【技術分野】
【0001】
本発明の一実施形態は、建物の内部を3次元計測する際の効率的な計測位置を選定するための演算処理に要する計算負荷を低減する前処理方法、プログラム、及び前処理装置に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
既存の建物の内部構造を3次元計測してBIM(Building Information Modeling)情報として取得して、活用する研究開発が進められている(例えば、特許文献1)。建物の内部構造を3次元計測するために地上型3Dレーザースキャナ(以降、単に3Dスキャナという)が用いられるが、建物の内部構造が広く、また複雑であるほど、3Dスキャナの位置を変えてスキャンする必要があるため、スキャンの回数が増加する。
【先行技術文献】
【特許文献】
【0003】
特開2022-142994号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
建物の内部を3Dスキャナで計測を行う場合、3Dスキャナは360度回転しながら高密度の計測を行うため、一か所あたりの計測に関わる処理時間が長いという問題がある。したがって、建物の内部において、計測する対象を網羅しつつ可能な限りスキャン回数を減らしたいという要求がある。実際に建物の計測を行うにあたり、遮蔽物の影響や3Dスキャナの計測可能範囲を考慮する必要があり計測範囲の予測が難しい。そのため、必要となる範囲よりも広い範囲での計測や、多くの計測回数による計測を実施する必要があり、計測負荷が高くなる。これを解消するために、厳密に計測場所のシミュレーションを行う場合、建物の構造を示す3次元データに対する演算処理に要する計算負荷が高くなってしまい現実的ではない。
【0005】
上記問題に鑑み、本発明の一実施形態は、既存の建物の内部を3次元計測する際に、効率的に計測位置を選定して演算処理に要する計算負荷を低減する前処理方法、プログラム、または前処理装置を提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
本発明の一実施形態に係る前処理方法は、建物の内部を3Dスキャナを用いて3次元計測するために計測位置を演算処理するための前処理方法であって、建物の建築図面から計測対象範囲及び障害物の位置情報を含む2次元データを取得し、2次元データに基づいて、計測対象範囲及び障害物の位置を特徴付ける複数の頂点を抽出して、複数の頂点のうち、互いに隣接する頂点を結ぶ線分を導出し、線分を、3Dスキャナが計測可能な単位に基づいて分割することをコンピュータが実行する。
【0007】
上記の前処理方法において、線分を、3Dスキャナが計測可能な最小単位len
min
で分割する。
【0008】
上記の前処理方法において、最小単位len
min
は、線分と3Dスキャナの計測位置との距離をX
min
で表し、3Dスキャナから出射される赤外光が線分に入射する角度θが最小となる角度θ
min
とで表したときに、式(1)で表される。
【0009】
JPEG
2025144413000002.jpg
20
98
【0010】
本発明の一実施形態に係るプログラムは、上記の前処理方法を、コンピュータに実行させるためのプログラムである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
10日前
個人
高精度同時多点測定装置
2日前
個人
アクセサリー型テスター
3日前
ユニパルス株式会社
ロードセル
9日前
アズビル株式会社
圧力センサ
15日前
株式会社チノー
放射光測温装置
9日前
エイブリック株式会社
磁気センサ回路
15日前
トヨタ自動車株式会社
監視装置
8日前
株式会社ヨコオ
ソケット
8日前
株式会社ヨコオ
ソケット
9日前
ダイキン工業株式会社
監視装置
7日前
TDK株式会社
ガスセンサ
14日前
ローム株式会社
半導体装置
1日前
TDK株式会社
磁気センサ
8日前
TDK株式会社
ガスセンサ
9日前
株式会社東芝
重量測定装置
14日前
長崎県
形状計測方法
3日前
TDK株式会社
ガスセンサ
15日前
ローム株式会社
半導体装置
1日前
日本特殊陶業株式会社
センサ
7日前
多摩川精機株式会社
冗長エンコーダ
8日前
株式会社デンソー
電流センサ
1日前
三菱マテリアル株式会社
温度センサ
10日前
日本特殊陶業株式会社
センサ
7日前
トヨタ自動車株式会社
測定システム
今日
富士電機株式会社
エンコーダ
15日前
ダイハツ工業株式会社
移動支援装置
8日前
日本特殊陶業株式会社
センサ
7日前
日本特殊陶業株式会社
センサ
7日前
日本特殊陶業株式会社
センサ
7日前
三恵技研工業株式会社
融雪レドーム
8日前
中国電力株式会社
電柱管理システム
7日前
TDK株式会社
電磁波センサ
9日前
日鉄テックスエンジ株式会社
聴音装置
9日前
住友電気工業株式会社
分析方法
10日前
株式会社精工技研
光電界センサヘッド
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ