TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139503
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024038474
出願日
2024-03-12
発明の名称
推進装置制御システムおよび航行支援装置
出願人
ナブテスコ株式会社
代理人
個人
主分類
B63H
21/21 20060101AFI20250918BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】操船者の意図通りの操船を支援可能な技術を提供する。
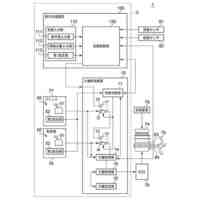
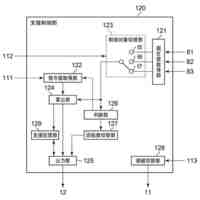
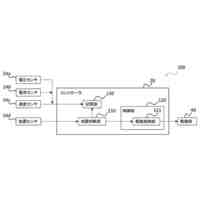
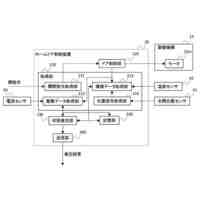
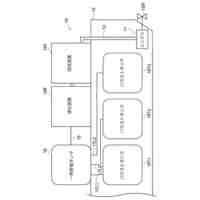
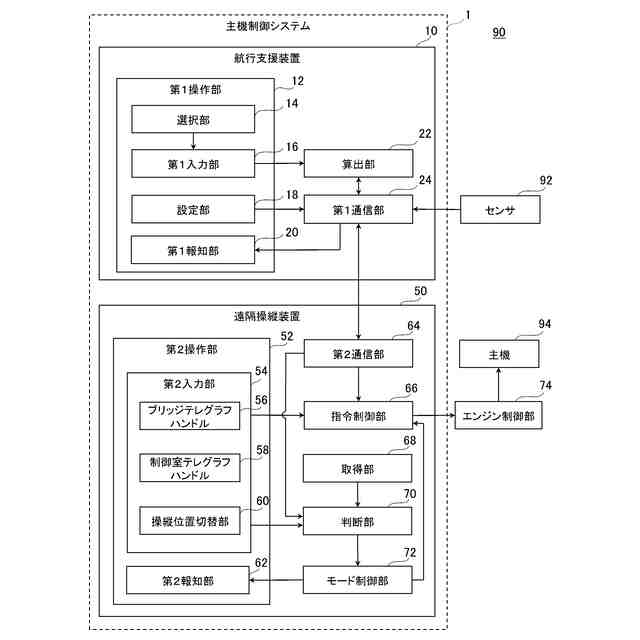
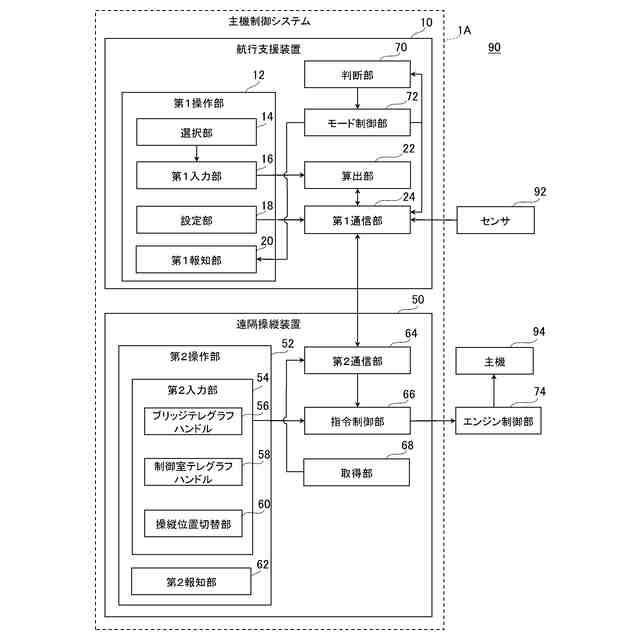
【解決手段】主機制御システム1は、航行支援装置10と遠隔操縦装置50とを備える。航行支援装置10は、推進パラメータを選択する選択操作と、推進パラメータの指令値を入力する第1入力操作とを受け付ける第1操作部12と、主機94の回転数の指令値を算出する算出部22とを備え、遠隔操縦装置50は、主機94の回転数の指令値を入力する第2入力操作を受け付ける第2操作部52と、航行支援モードの場合に回転数の現在値を算出部22が算出した回転数の指令値に追従させ、通常航行モードの場合に回転数の現在値を第2入力操作に対応した回転数の指令値に追従させる指令制御部66とを備え、切替条件を判断する判断部70と、切替条件が満たされた場合に報知動作および切替動作の少なくとも一方を実行するモード制御部72とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
航行支援装置と、遠隔操縦装置と、を備える推進装置制御システムであって、
前記航行支援装置は、
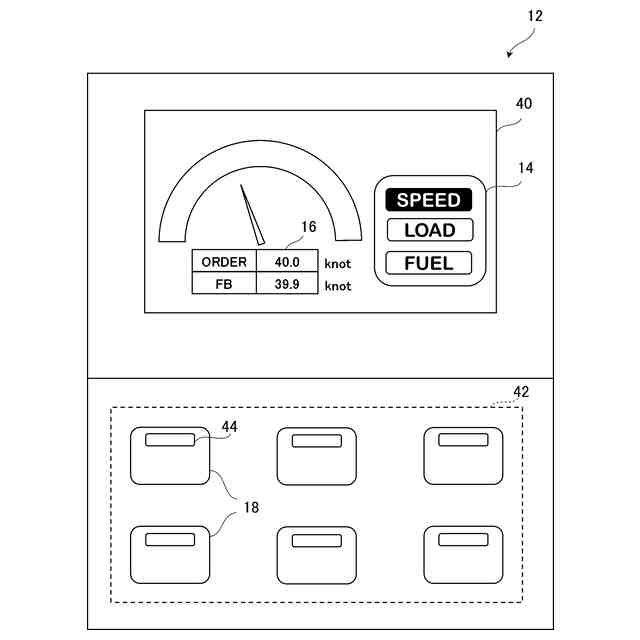
船舶の船速と、前記船舶が有する推進装置が出力する馬力と、を含む複数のパラメータの中から制御対象とする推進パラメータを選択する選択操作と、前記推進パラメータの指令値を入力する第1入力操作とを受け付ける第1操作部と、
前記推進パラメータの現在値を、前記第1操作部を介して入力された前記推進パラメータの指令値に追従させるための、前記推進装置の回転数の指令値を算出する算出部と、
を備え、
前記遠隔操縦装置は、
前記推進装置の回転数の指令値を入力するための第2入力操作を受け付ける第2操作部と、
現在の操縦モードが航行支援モードに設定されている場合に前記回転数の現在値を前記算出部が算出した前記回転数の指令値に追従させるように前記推進装置を制御し、前記操縦モードが通常航行モードに設定されている場合に前記回転数の現在値を前記第2入力操作に対応した前記回転数の指令値に追従させるように前記推進装置を制御する推進装置制御部と、
を備え、
前記航行支援装置または前記遠隔操縦装置は、さらに、
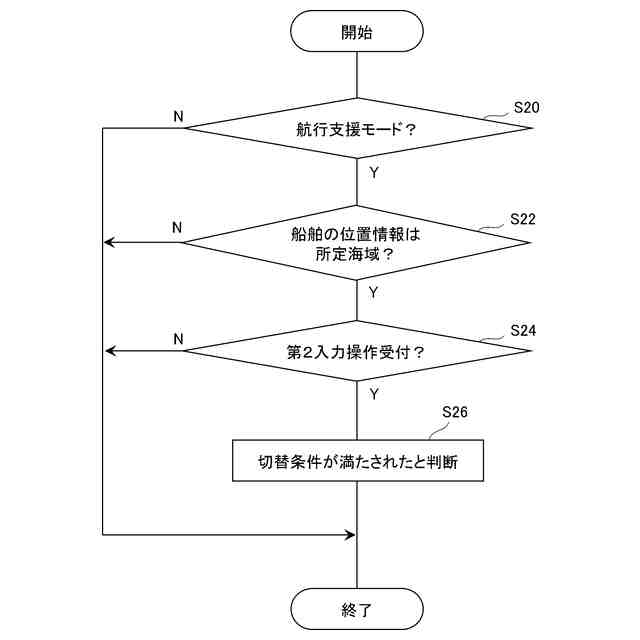
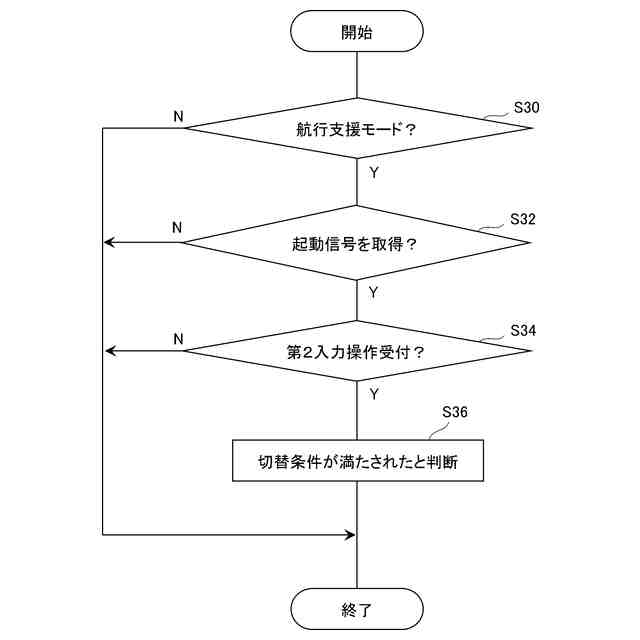
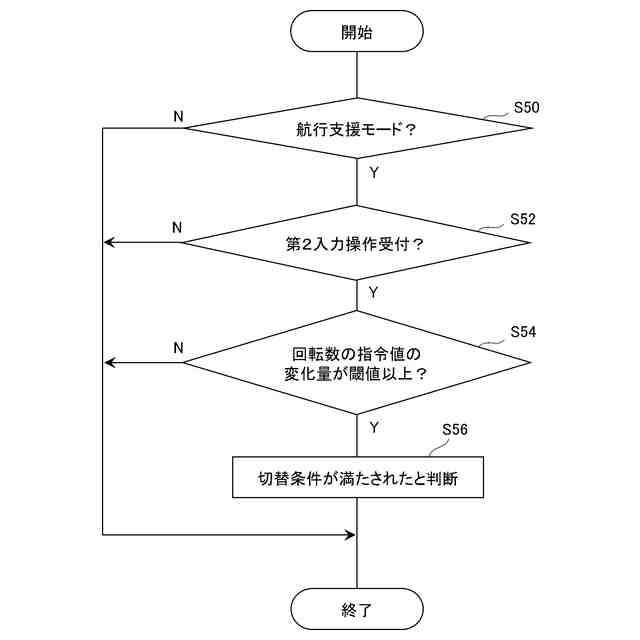
前記操縦モードが前記航行支援モードに設定されている際に、前記第2操作部を介して前記第2入力操作が受け付けられたことを含む切替条件が満たされたか否かを判断する判断部と、
前記切替条件が満たされた場合に、操船者に対する報知動作、および、前記操縦モードを前記航行支援モードから前記通常航行モードに切り替える切替動作の少なくとも一方を実行するモード制御部と、
を備える、推進装置制御システム。
続きを表示(約 960 文字)
【請求項2】
前記推進装置は、主機であり、
前記複数のパラメータは、前記主機の燃料消費量を含む、
請求項1に記載の推進装置制御システム。
【請求項3】
前記第1操作部は、現在の前記操縦モードを、前記通常航行モードおよび前記航行支援モードのいずれかに設定する設定操作をさらに受け付ける、
請求項1または2に記載の推進装置制御システム。
【請求項4】
前記報知動作は、前記第1操作部が有する画面での警告表示、および、前記第1操作部が有するスピーカーでの警報の少なくとも一方を含む、
請求項1または2に記載の推進装置制御システム。
【請求項5】
前記切替条件は、前記船舶の位置情報が所定海域を示すことを含む、
請求項1または2に記載の推進装置制御システム。
【請求項6】
前記所定海域は港湾内である、
請求項5に記載の推進装置制御システム。
【請求項7】
前記遠隔操縦装置は、前記推進装置の運転状態が作動中であることを示す作動信号と、前記推進装置の運転状態が起動状態であることを示す起動信号と、前記推進装置の運転状態が停止していることを示す停止信号と、の少なくともいずれかを取得する取得部をさらに備える、
請求項1または2に記載の推進装置制御システム。
【請求項8】
前記切替条件は、入力された前記第2入力操作に対応した前記回転数の指令値が閾値未満であることを含む、
請求項1または2に記載の推進装置制御システム。
【請求項9】
前記切替条件は、前記第2入力操作に対応した前記回転数の指令値の変化量が閾値以上であることを更に含む、
請求項1または2に記載の推進装置制御システム。
【請求項10】
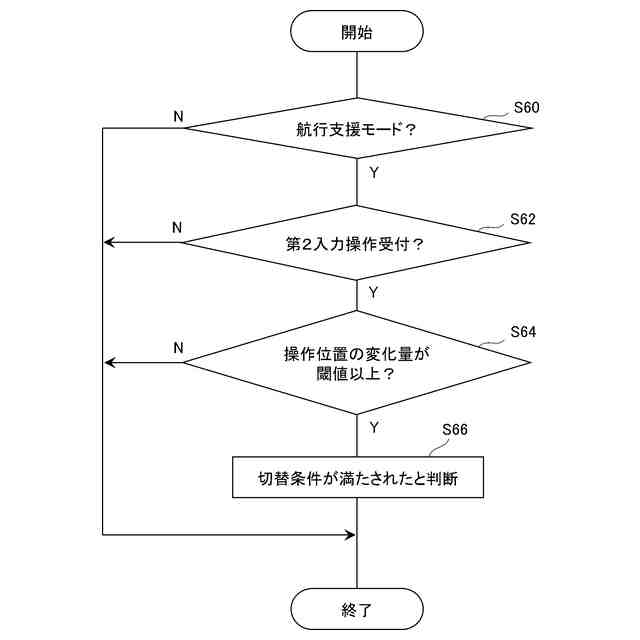
前記第2操作部は、前記第2入力操作により操作可能なハンドルと、前記ハンドルの操作位置を検出する検出部と、を含み、
前記切替条件は、前記検出部の検出結果に基づく前記ハンドルの操作位置の変化量が閾値以上であることを含む、
請求項1または2に記載の推進装置制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、推進装置制御システムおよび航行支援装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、通常航行状態にて船を推進させるエンジンのスロットルを調整するレバー操作部と、オートクルーズ航行状態にて船速を調整するためのオートクルーズ操作ボタンが設けられたステアリング操作部と、を有するジェット推進艇が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-69776号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、オートクルーズ航行状態であるにも関わらず、通常航行状態での操作のためのレバー操作部が操作された場合、操船者の意図通りの操船が行われない可能性がある。
【0005】
上記課題を鑑みて、本発明の目的は、操船者の意図通りの操船を支援可能な技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の推進装置制御システムは、航行支援装置と、遠隔操縦装置と、を備える。航行支援装置は、船舶の船速と、船舶が有する推進装置が出力する馬力と、を含む複数のパラメータの中から制御対象とする推進パラメータを選択する選択操作と、推進パラメータの指令値を入力する第1入力操作とを受け付ける第1操作部と、推進パラメータの現在値を、第1操作部を介して入力された推進パラメータの指令値に追従させるための、推進装置の回転数の指令値を算出する算出部と、を備える。遠隔操縦装置は、推進装置の回転数の指令値を入力するための第2入力操作を受け付ける第2操作部と、現在の操縦モードが航行支援モードに設定されている場合に回転数の現在値を算出部が算出した回転数の指令値に追従させるように推進装置を制御し、操縦モードが通常航行モードに設定されている場合に回転数の現在値を第2入力操作に対応した回転数の指令値に追従させるように推進装置を制御する推進装置制御部と、を備える。航行支援装置または遠隔操縦装置は、さらに、操縦モードが航行支援モードに設定されている際に、第2操作部を介して第2入力操作が受け付けられたことを含む切替条件が満たされたか否かを判断する判断部と、切替条件が満たされた場合に、操船者に対する報知動作、および、操縦モードを航行支援モードから通常航行モードに切り替える切替動作の少なくとも一方を実行するモード制御部と、を備える。
【0007】
本発明の別の態様は、推進装置制御システムである。この推進装置制御システムは、航行支援装置と、遠隔操縦装置と、を備える。航行支援装置は、船舶の船速と、船舶が有する推進装置が出力する馬力と、を含む複数のパラメータの中から制御対象とする推進パラメータを選択する選択操作と、推進パラメータの指令値を入力する第1入力操作とを受け付ける第1操作部と、推進パラメータの現在値を、第1操作部を介して入力された推進パラメータの指令値に追従させるための、推進装置の回転数の指令値を算出する算出部と、を備える。遠隔操縦装置は、推進装置の回転数の指令値を入力するための第2入力操作を受け付ける第2操作部と、現在の操縦モードが航行支援モードに設定されている場合に回転数の現在値を算出部が算出した回転数の指令値に追従させるように推進装置を制御し、操縦モードが通常航行モードに設定されている場合に回転数の現在値を第2入力操作に対応した回転数の指令値に追従させるように推進装置を制御する推進装置制御部と、を備える。遠隔操縦装置または航行支援装置は、さらに、操縦モードが通常航行モードに設定されている際に、第1操作部を介して第1入力操作が受け付けられたことを含む切替条件が満たされたか否かを判断する判断部と、切替条件が満たされた場合に、操船者に対する報知動作、および、操縦モードを通常航行モードから航行支援モードに切り替える切替動作の少なくとも一方を実行するモード制御部と、を備える。
【0008】
本発明のさらに別の態様は、推進装置制御システムである。この推進装置制御システムは、定位置保持装置と、遠隔操縦装置と、を備える。定位置保持装置は、船舶の位置および方位の指令値を入力する第1入力操作と、現在の操縦モードを通常航行モードおよび定位置保持モードのいずれかに設定する設定操作と、を受け付ける第1操作部と、船舶の位置および方位の指令値を現在値に保持するために、船舶を推進させる推進装置の指令値を算出する算出部と、を備える。遠隔操縦装置は、推進装置の指令値を入力するための第2入力操作を受け付ける第2操作部と、操縦モードが定位置保持モードに設定されている場合に推進装置の現在値を算出部が算出した指令値に追従させるように推進装置を制御し、操縦モードが通常航行モードに設定されている場合に推進装置の現在値を第2入力操作に対応した推進装置の指令値に追従させるように推進装置を制御する推進装置制御部と、を備える。遠隔操縦装置または定位置保持装置は、さらに、操縦モードが定位置保持モードに設定されている際に、第2操作部を介して第2入力操作が受け付けられたことを含む切替条件が満たされたか否かを判断する判断部と、切替条件が満たされた場合に、操船者に対する報知動作、および、操縦モードを定位置保持モードから通常航行モードに切り替える切替動作の少なくとも一方を実行するモード制御部と、を備える。
【0009】
本発明のさらに別の態様は、航行支援装置である。この装置は、船舶の船速と、船舶が有する推進装置が出力する馬力と、を含む複数のパラメータの中から制御対象とする推進パラメータを選択する選択操作と、推進パラメータの指令値を入力する第1入力操作とを受け付ける第1操作部と、推進パラメータの現在値を、第1操作部を介して入力された推進パラメータの指令値に追従させるための、推進装置の回転数の指令値を算出する算出部と、現在の操縦モードが回転数の現在値を算出部が算出した回転数の指令値に追従させるための航行支援モードに設定されている際に、推進装置の回転数の指令値を入力するための第2入力操作を受け付ける操縦装置の第2操作部を介して第2入力操作が受け付けられたことを含む切替条件が満たされたか否かを判断する判断部と、切替条件が満たされた場合に、操船者に対する報知動作、および、操縦モードを航行支援モードから回転数の現在値を第2入力操作に対応した回転数の指令値に追従させるための通常航行モードに切り替える切替動作の少なくとも一方を実行するモード制御部と、を備える。
【0010】
なお、以上の任意の組み合わせや、本発明の構成要素や表現を方法、装置、プログラム、プログラムを記録した一時的なまたは一時的でない記憶媒体、システムなどの間で相互に置換したものもまた、本発明の態様として有効である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ナブテスコ株式会社
回転装置
18日前
ナブテスコ株式会社
歯車装置
1か月前
ナブテスコ株式会社
回転装置
1か月前
ナブテスコ株式会社
鉄道用圧縮装置
3日前
ナブテスコ株式会社
方向切換弁装置
17日前
ナブテスコ株式会社
主機制御システム
1か月前
ナブテスコ株式会社
ユニットブレーキ装置
1か月前
ナブテスコ株式会社
回転装置及び歯車装置
1か月前
ナブテスコ株式会社
ドーザブレード駆動機構
16日前
ナブテスコ株式会社
駆動装置及び位置調整装置
2か月前
ナブテスコ株式会社
主機制御システム及び航行支援装置
1か月前
ナブテスコ株式会社
保持器、転がり軸受、及び回転装置
1か月前
ナブテスコ株式会社
推進装置制御システム、航行支援装置
1か月前
ナブテスコ株式会社
推進装置制御システムおよび航行支援装置
1か月前
ナブテスコ株式会社
推進装置制御システムおよび航行支援装置
1か月前
ナブテスコ株式会社
ワークポジショナ及びワークポジショナの設置方法
2か月前
ナブテスコ株式会社
空気圧縮ユニット、圧縮装置、引出治具及び機器引出方法
3日前
ナブテスコ株式会社
自動ドア装置及びその制御方法
3日前
ナブテスコ株式会社
減速機、アクチュエータ、及び、建設機械
3日前
ナブテスコ株式会社
状態推定装置、ホームドアシステム及び状態推定方法
16日前
ナブテスコ株式会社
状態推定装置、ホームドアシステム及び状態推定方法
16日前
ナブテスコ株式会社
風力発電装置の制御装置、風力発電装置用の処理回路、風力発電装置用の制御方法、及び風力発電装置用の制御プログラム
1か月前
個人
水上遊具
5か月前
個人
川下り用船
12か月前
個人
洋上研究所
4か月前
個人
補助機構
8か月前
個人
津波防災ウエア
3か月前
個人
船用横揺防止具
9か月前
個人
コンパクトシティ船
8か月前
個人
渦流動力推進構造
8か月前
個人
セールのバテンガイド装置
4か月前
石田造船株式会社
内航船
16日前
炎重工株式会社
浮標
10か月前
個人
水質浄化・集熱昇温システム
5か月前
炎重工株式会社
浮標
10か月前
住友重機械工業株式会社
船舶
5か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ