TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025130359
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027483
出願日
2024-02-27
発明の名称
食材用搬送装置
出願人
株式会社ソディック
代理人
SK弁理士法人
,
個人
,
個人
主分類
B65B
5/12 20060101AFI20250901BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】より正確にかつ高速に所定量の食材を盛り付け可能な食材用搬送装置を提供する。
【解決手段】本発明によれば、搬送機構と、掬い取り機構と、計量部と、押し出し機構と、押し出し制御部と、を備える食材用搬送装置であって、前記搬送機構は、前記掬い取り機構を食材の搬送元から搬送先へ移動可能に構成され、前記掬い取り機構は、前記食材を掬い取って保持可能に構成され、前記計量部は、前記掬い取り機構によって保持されている前記食材の重量を計測して計測値を取得可能に構成され、前記押し出し機構は、前記掬い取り機構が保持している前記食材を、前記掬い取り機構から押し出すように移動可能に構成され、前記押し出し制御部は、前記計測値を参照して前記押し出し機構を移動させて、1ユニット分の前記食材を押し出すトッピング動作を実行するように構成される、食材用搬送装置が提供される。
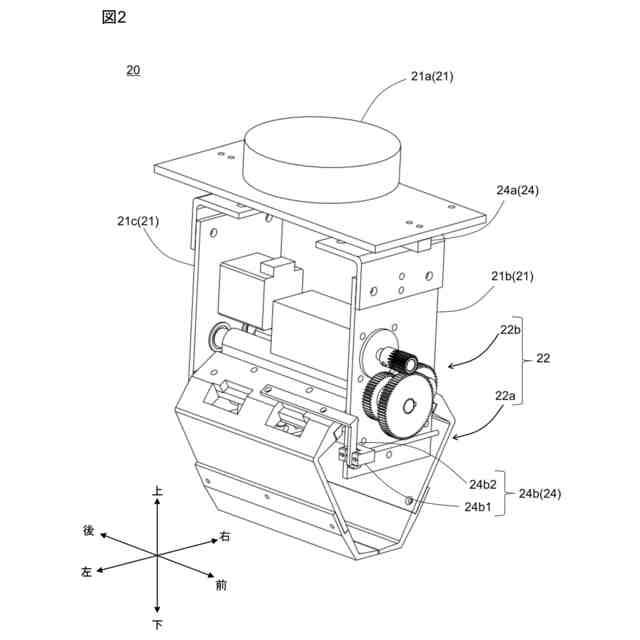
【選択図】図2
特許請求の範囲
【請求項1】
搬送機構と、掬い取り機構と、計量部と、押し出し機構と、押し出し制御部と、を備える食材用搬送装置であって、
前記搬送機構は、前記掬い取り機構を食材の搬送元から搬送先へ移動可能に構成され、
前記掬い取り機構は、前記食材を掬い取って保持可能に構成され、
前記計量部は、前記掬い取り機構によって保持されている前記食材の重量を計測して計測値を取得可能に構成され、
前記押し出し機構は、前記掬い取り機構が保持している前記食材を、前記掬い取り機構から押し出すように移動可能に構成され、
前記押し出し制御部は、前記計測値を参照して前記押し出し機構を移動させて、1ユニット分の前記食材を押し出すトッピング動作を実行するように構成される、食材用搬送装置。
続きを表示(約 990 文字)
【請求項2】
請求項1に記載の食材用搬送装置であって、
前記計量部は、前記押し出し機構の動作中にリアルタイムで前記重量を計測可能に構成されている、食材用搬送装置。
【請求項3】
請求項1又は請求項2に記載の食材用搬送装置であって、
前記掬い取り機構は、少なくとも2ユニット分の量の前記食材を掬い取り可能に構成され、
前記押し出し制御部は、前記掬い取り機構が前記食材の掬い取りを行う度に、前記トッピング動作を複数回実行するように構成される、食材用搬送装置。
【請求項4】
請求項1に記載の食材用搬送装置であって、
前記トッピング動作では、前記押し出し制御部は、前記トッピング動作に伴う前記計測値の減少量が、前記1ユニット分の前記食材の重量に相当する目標値を基準とする閾値の範囲に収まるように押し出しを制御する、食材用搬送装置。
【請求項5】
請求項4に記載の食材用搬送装置であって、
前記押し出し機構による押し出し速度は、可変であり、
前記押し出し制御部は、前記計測値の減少量が前記目標値よりも小さい減速開始基準値に到達すると、前記押し出し速度を減少させるように前記押し出し機構を制御する、食材用搬送装置。
【請求項6】
請求項4又は請求項5に記載の食材用搬送装置であって、
前記押し出し制御部は、前記減少量が前記目標値よりも小さい完了基準値に到達すると前記押し出しが停止されるように前記押し出し機構を制御する、食材用搬送装置。
【請求項7】
請求項6に記載の食材用搬送装置であって、
予測部をさらに備え、
前記予測部は、前記押し出しが停止した後に前記掬い取り機構から脱落する前記食材の予測脱落値を、以前の前記トッピング動作での前記食材の脱落重量に基づいて決定し、
前記完了基準値は、前記目標値と前記予測脱落値に基づいて設定される、食材用搬送装置。
【請求項8】
請求項1に記載の食材用搬送装置であって、
前記トッピング動作では、前記押し出し制御部は、前記押し出し機構による押し出し方向への押し出しが完了した後に、前記押し出し方向とは逆向き移動するように前記押し出し機構を制御する、食材用搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、食材用搬送装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
食品業界に限らず、産業全体において製造工程の各工程で自動化が図られている。例えば、食材の搬送装置においては、食材のパッケージングのために、あるいは連続する2つの工程の間で食材を自動的に移送するために、搬送装置の自動化が進められている。
【0003】
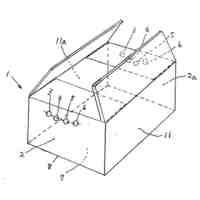
特許文献1には、ベルトコンベアで運ばれてきた食品を自動的に箱詰めすることができる箱詰め装置が開示されている。該箱詰め装置では、流れてきたパンを1つずつ掬い取り、箱詰め用の箱の近くに移動させ、箱詰め用の箱に食品を落下させることで自動的に箱詰めすることを実現している。
【先行技術文献】
【特許文献】
【0004】
特許6511300号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、該箱詰め装置では、パンなど1つの単位がすでに決まったものを対象としており、計量を行っていないため、例えば惣菜などの形状が定まっていない食材の盛り付けに適用したい場合、正確に盛り付けをすることができないという課題があった。また、該箱詰め装置では、パンを1つずつ掬い取って搬送を行うため、作業に時間がかかるおそれがあった。
【0006】
本発明はこのような事情に鑑みてなされたものであり、より正確にかつ高速に所定量の食材を盛り付け可能な食材用搬送装置を提供するものである。
【課題を解決するための手段】
【0007】
本発明によれば、以下の発明が提供される。
[1]搬送機構と、掬い取り機構と、計量部と、押し出し機構と、押し出し制御部と、を備える食材用搬送装置であって、前記搬送機構は、前記掬い取り機構を食材の搬送元から搬送先へ移動可能に構成され、前記掬い取り機構は、前記食材を掬い取って保持可能に構成され、前記計量部は、前記掬い取り機構によって保持されている前記食材の重量を計測して計測値を取得可能に構成され、前記押し出し機構は、前記掬い取り機構が保持している前記食材を、前記掬い取り機構から押し出すように移動可能に構成され、前記押し出し制御部は、前記計測値を参照して前記押し出し機構を移動させて、1ユニット分の前記食材を押し出すトッピング動作を実行するように構成される、食材用搬送装置。
[2][1]に記載の食材用搬送装置であって、前記計量部は、前記押し出し機構の動作中にリアルタイムで前記重量を計測可能に構成されている、食材用搬送装置。
[3][1]又は[2]に記載の食材用搬送装置であって、前記掬い取り機構は、少なくとも2ユニット分の量の前記食材を掬い取り可能に構成され、前記押し出し制御部は、前記掬い取り機構が前記食材の掬い取りを行う度に、前記トッピング動作を複数回実行するように構成される、食材用搬送装置。
[4][1]~[3]のいずれか一項に記載の食材用搬送装置であって、前記トッピング動作では、前記押し出し制御部は、前記トッピング動作に伴う前記計測値の減少量が、前記1ユニット分の前記食材の重量に相当する目標値を基準とする閾値の範囲に収まるように押し出しを制御する、食材用搬送装置。
[5][4]に記載の食材用搬送装置であって、前記押し出し機構による押し出し速度は、可変であり、前記押し出し制御部は、前記計測値の減少量が前記目標値よりも小さい減速開始基準値に到達すると、前記押し出し速度を減少させるように前記押し出し機構を制御する、食材用搬送装置。
[6][4]又は[5]に記載の食材用搬送装置であって、前記押し出し制御部は、前記減少量が前記目標値よりも小さい完了基準値に到達すると前記押し出しが停止されるように前記押し出し機構を制御する、食材用搬送装置。
[7][6]に記載の食材用搬送装置であって、予測部をさらに備え、前記予測部は、前記押し出しが停止した後に前記掬い取り機構から脱落する前記食材の予測脱落値を、以前の前記トッピング動作での前記食材の脱落重量に基づいて決定し、前記完了基準値は、前記目標値と前記予測脱落値に基づいて設定される、食材用搬送装置。
[8][1]~[7]のいずれか一項に記載の食材用搬送装置であって、前記トッピング動作では、前記押し出し制御部は、前記押し出し機構による押し出し方向への押し出しが完了した後に、前記押し出し方向とは逆向き移動するように前記押し出し機構を制御する、食材用搬送装置。
【発明の効果】
【0008】
本発明に係る食材用搬送装置では、食材を所定の配分量よりも大雑把に多めに掬い取ることが可能に制御される掬い取り機構と、リアルタイムに計測される計測値に基づいて所定の配分量になるまで食材を押し出すように制御される押し出し機構と、を備える構成によって、正確かつ高速に盛り付けを行うことができる。
【図面の簡単な説明】
【0009】
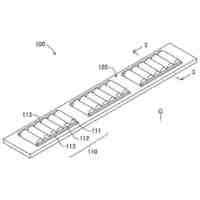
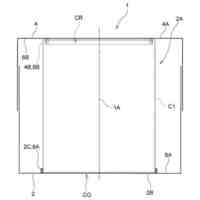
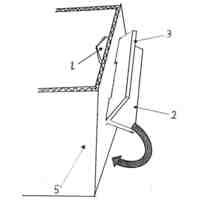
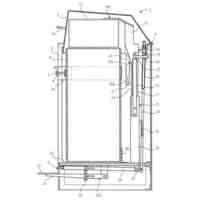
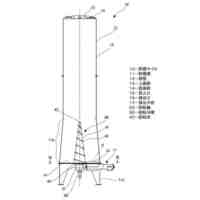
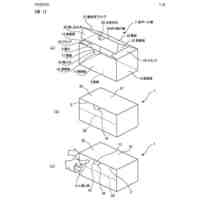
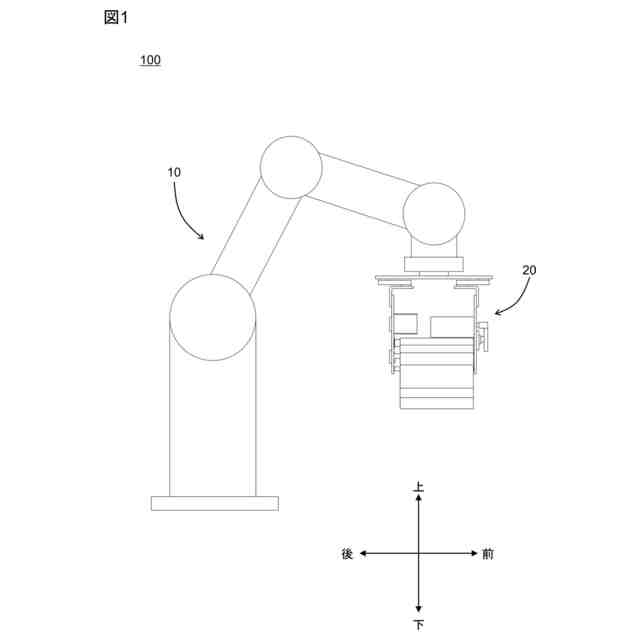
本発明の第1実施形態に係る食材用搬送装置100の概略側面図である。
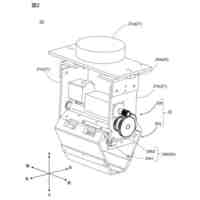
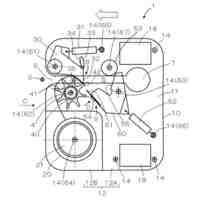
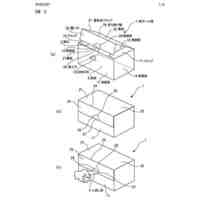
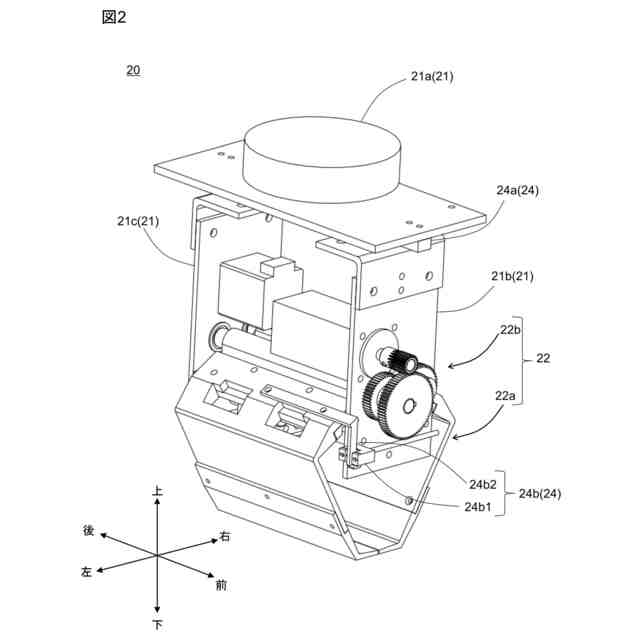
本発明の第1実施形態に係るハンドユニット20の斜視図である。
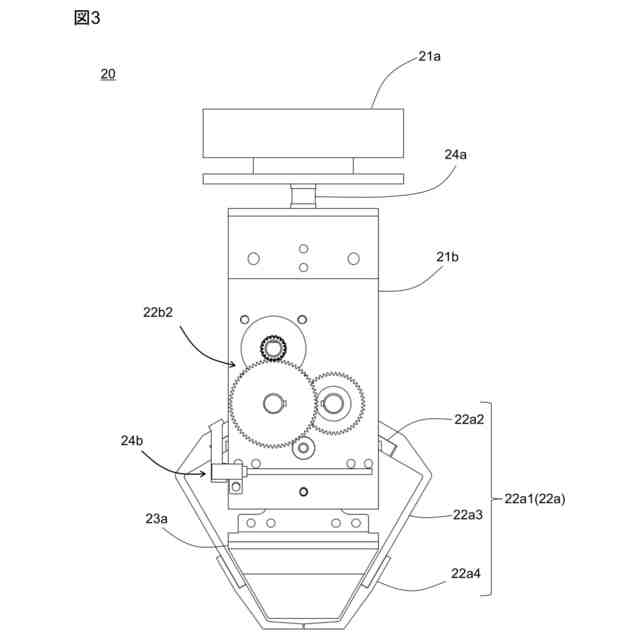
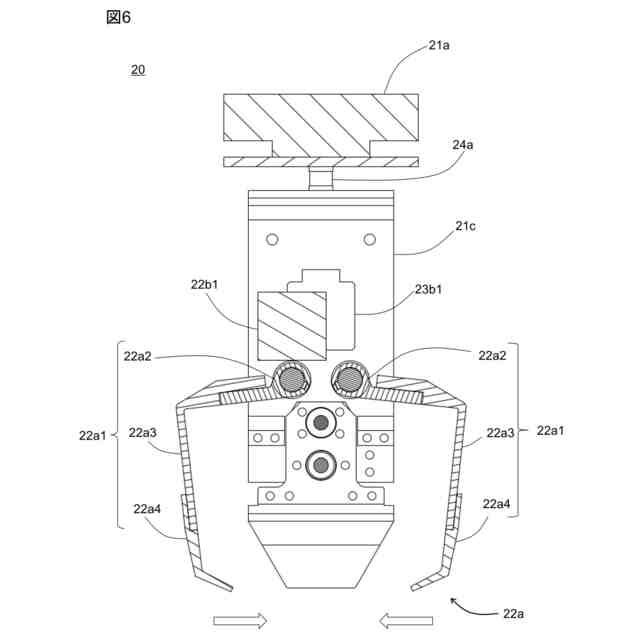
本発明の第1実施形態に係るハンドユニット20の正面図である。
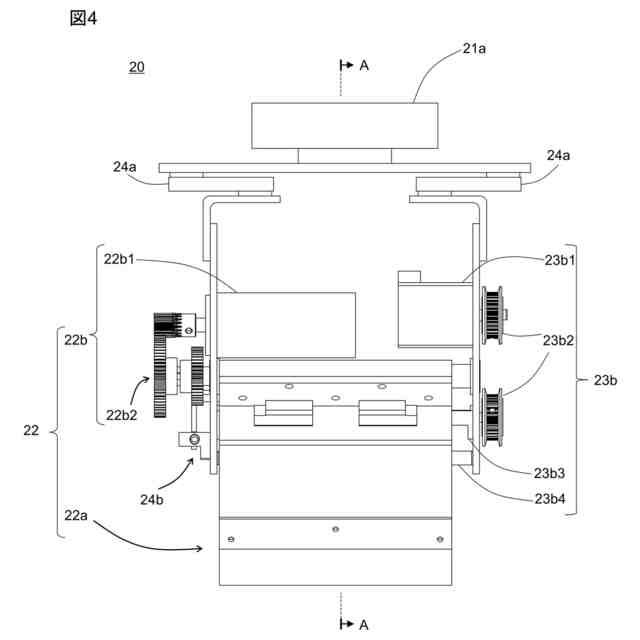
本発明の第1実施形態に係るハンドユニット20の右側面図である。
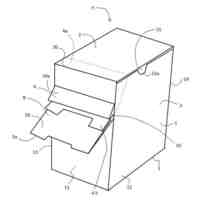
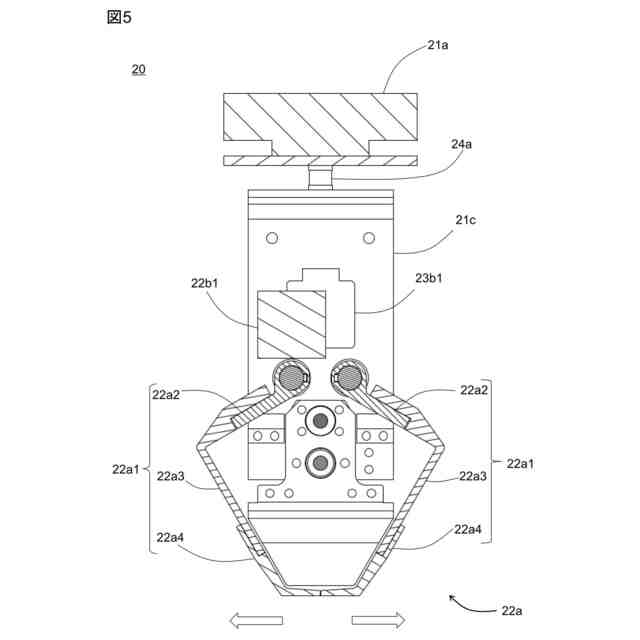
掬い取り部22aが閉状態のときの図4におけるA-A断面図である。
掬い取り部22aが開状態のときの図4におけるA-A断面図である。
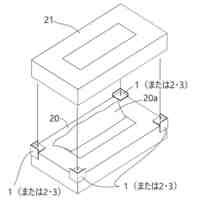
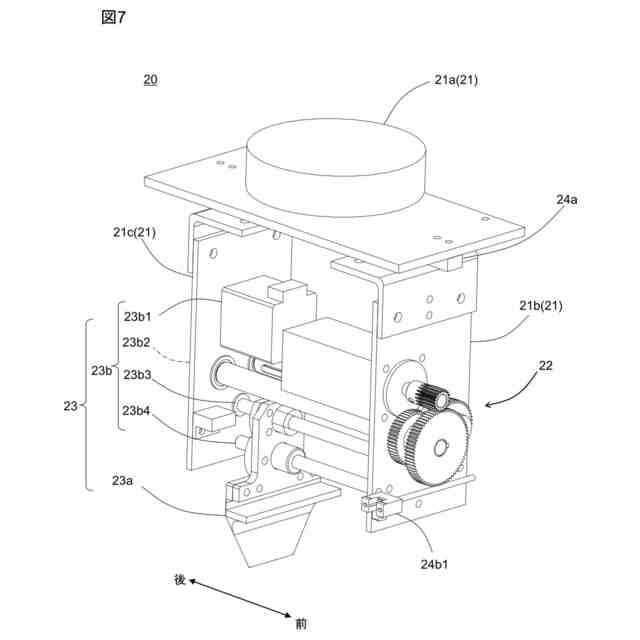
本発明の第1実施形態に係る掬い取り部22aを取り外したハンドユニット20の斜視図である。
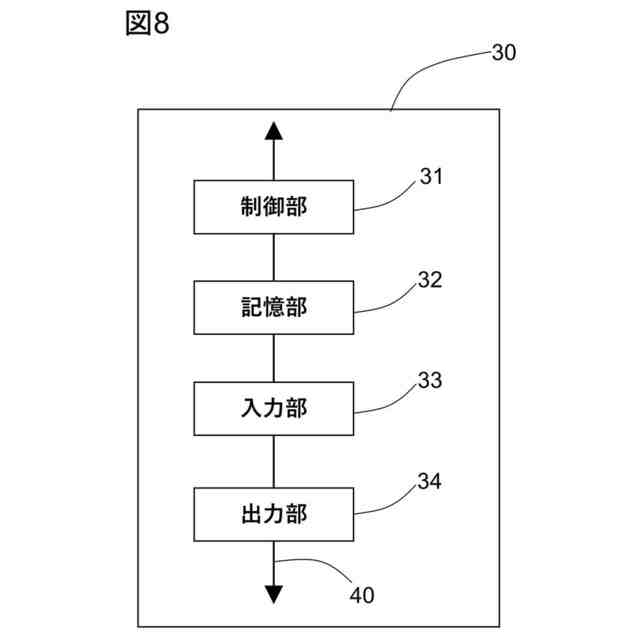
本発明の第1実施形態に係る制御手段30のハードウェア構成を示すブロック図である。
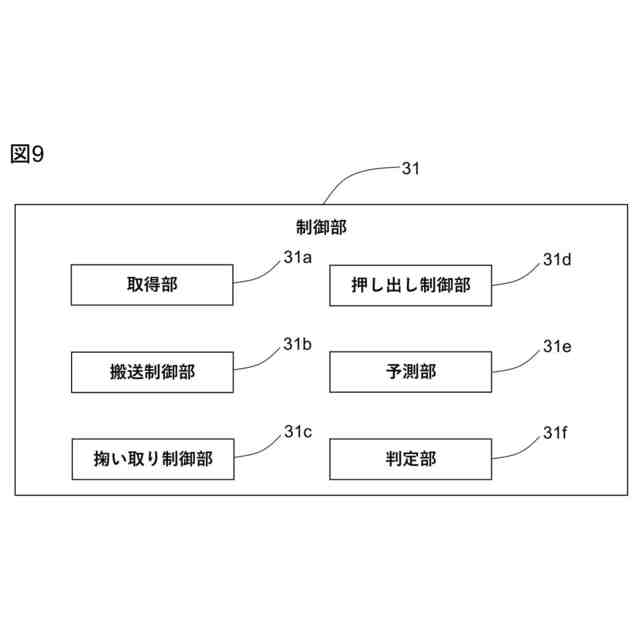
本発明の第1実施形態に係る制御部31の機能構成を示すブロック図である。
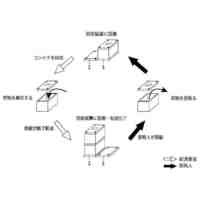
食材用搬送装置100が実行する盛り付け動作全体の流れを示すフローチャートである。
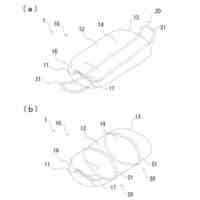
本発明の第2実施形態に係るハンドユニット20の斜視図である。
本発明の第3実施形態に係るハンドユニット20の斜視図である。
本発明の第3実施形態に係る掬い取り部22aが閉状態の場合の爪部22a4の底面図である。
4つの押し出し制御方法によって盛り付けした際の誤差量を示す。
2つの押し出し制御方法によって盛り付けした際の掬い取り部22aの計測値の時間変化を示す。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。また、各特徴について独立して発明が成立する。さらに、以下の実施形態のうち、特許請求の範囲で規定されていない要素は、任意の要素であるので、省略可能である。以下の説明中で開示する数値の末尾には、任意の個数(例えば1つ又は2つ)の「0」を追加してもよい。例えば、「1.4」の後ろに「0」を1つ又は2つ追加して「1.40」又は「1.400」としてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ソディック
食材用搬送装置
15日前
個人
箱
11か月前
個人
包装体
11か月前
個人
ゴミ箱
11か月前
個人
収容箱
2か月前
個人
コンベア
4か月前
個人
段ボール箱
5か月前
個人
容器
8か月前
個人
段ボール箱
6か月前
個人
ゴミ収集器
5か月前
個人
パウチ補助具
11か月前
個人
バンド
29日前
個人
土嚢運搬器具
7か月前
個人
楽ちんハンド
3か月前
個人
宅配システム
5か月前
個人
角筒状構造体
4か月前
個人
折り畳み水槽
11か月前
個人
ダンボール宝箱
12か月前
個人
廃棄物収容容器
1か月前
個人
閉塞装置
9か月前
個人
包装容器
4日前
個人
コード類収納具
7か月前
個人
お薬の締結装置
4か月前
個人
ゴミ処理機
8か月前
個人
貯蔵サイロ
5か月前
株式会社コロナ
梱包材
4か月前
個人
蓋閉止構造
2か月前
個人
蓋閉止構造
2か月前
株式会社和気
包装用箱
7か月前
個人
積み重ね用補助具
1か月前
個人
把手付米袋
3か月前
三甲株式会社
容器
4か月前
個人
袋入り即席麺
6か月前
三甲株式会社
蓋体
6か月前
株式会社新弘
容器
11か月前
個人
塗料容器用蓋
11か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ