TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025124250
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020172
出願日
2024-02-14
発明の名称
転舵制御装置
出願人
株式会社ジェイテクト
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250819BHJP(鉄道以外の路面車両)
要約
【課題】操舵トルクの変動を抑制することと、制御用トルク変数の値による制御性を高く維持することとの好適な折衷を図ることができるようにした転舵制御装置を提供する。
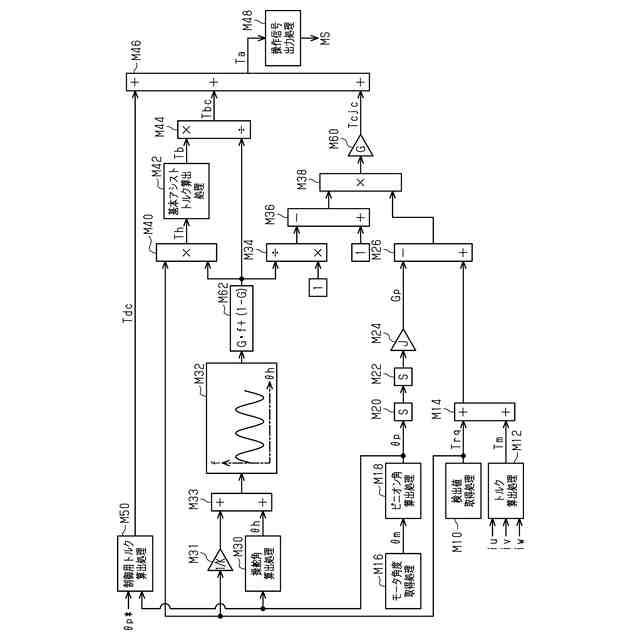
【解決手段】PU52は、トルクセンサ72による検出値Trqとアシストモータ42のトルクとの和に操舵角に応じて変動する係数を乗算した値に応じたトルクを算出する。PU52は、算出したトルクに応じて、アシストモータ42のトルクを制御する。PU52は、上位ECUによる車両の走行制御を優先すべきと判定する場合、上記変動する成分をゼロに設定する。
【選択図】図1
特許請求の範囲
【請求項1】
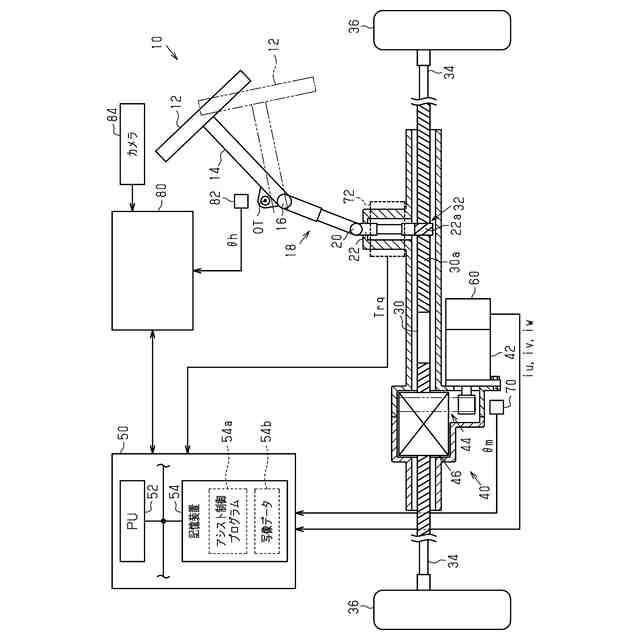
転舵装置を制御対象とする転舵制御装置であって、
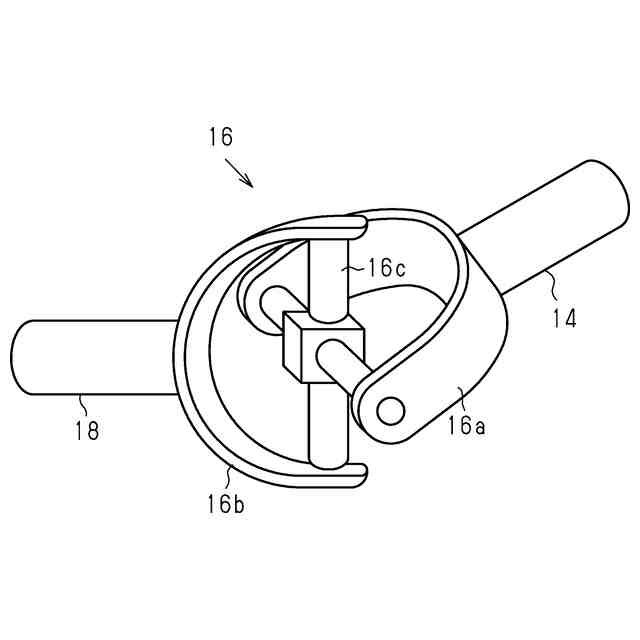
前記転舵装置は、ステアリングホイール、入力軸、中間軸、出力軸、第1カルダンジョイント、第2カルダンジョイント、アシストモータおよび転舵輪を備え、
前記入力軸は前記ステアリングホイールに連結されており、
前記第1カルダンジョイントは、前記入力軸および前記中間軸を連結する部材であり、
前記第2カルダンジョイントは、前記中間軸および前記出力軸を連結する部材であり、
前記転舵輪には、前記ステアリングホイールに入力される操舵トルクが、前記入力軸、前記中間軸、および前記出力軸を介して伝達され、
前記アシストモータは、前記第2カルダンジョイントよりも前記転舵輪に近い位置にトルクを付与するモータであり、
舵角変数取得処理、アシストトルク変数算出処理、制御用トルク取得処理、操作処理、変動トルク制御処理、および制限処理を実行するように構成され、
前記舵角変数取得処理は、操舵角変数の値を取得する処理であり、
前記操舵角変数は、前記ステアリングホイールの角度である操舵角を示す変数であり、
前記アシストトルク変数算出処理は、アシストトルク変数の値を算出する処理であり、
前記アシストトルク変数は、前記ステアリングホイールの操作に応じた運転者の操舵をアシストするためのトルクを示す変数であり、
前記制御用トルク取得処理は、制御用トルク変数の値を取得する処理であり、
前記制御用トルク変数は、前記ステアリングホイールの操作とは独立に車両の走行方向を制御するためのトルクを示す変数であり、
前記操作処理は、前記アシストトルク変数の値および前記制御用トルク変数の値の2つのうちの少なくとも1つに応じたトルクに応じて前記アシストモータの駆動回路を操作する処理であり、
前記変動トルク制御処理は、入力変数としての前記操舵角変数の値に基づき、前記操作処理の入力変数としてのトルクを前記操舵角に応じて変動させる処理であり、
前記制限処理は、前記操作処理の入力変数としてのトルクの前記操舵角に応じた変動の大きさを、前記操作処理における前記制御用トルク変数の値の優先度に応じて小さい側に制限する処理である転舵制御装置。
続きを表示(約 600 文字)
【請求項2】
操舵トルク変数取得処理を実行するように構成され、
前記操舵トルク変数取得処理は、操舵トルクを示す変数である操舵トルク変数の値を取得する処理であり、
前記制限処理は、入力変数としての前記操舵トルク変数の値に応じて前記優先度を把握する処理を含む請求項1記載の転舵制御装置。
【請求項3】
前記制限処理は、前記車両の外部の情報に応じて前記制御用トルク変数の値の優先度を定める信号に基づき前記優先度を把握する処理を含む請求項1記載の転舵制御装置。
【請求項4】
前記制限処理は、前記アシストトルク変数の値の優先度と比較して前記制御用トルク変数の値の優先度の方が低い状態から高い状態に切り替わることをトリガとして、前記変動の大きさをゼロへと漸減させる処理を含む請求項1記載の転舵制御装置。
【請求項5】
前記制限処理は、前記アシストトルク変数の値の優先度と比較して前記制御用トルク変数の値の優先度の方が高い状態から低い状態に切り替わることをトリガとして、前記変動の大きさをゼロから漸増させる処理を含む請求項1記載の転舵制御装置。
【請求項6】
前記制御用トルク変数の値は、前記ステアリングホイールの操作に応じた操舵を補正すべく、前記アシストトルク変数の値に重畳されるトルクである請求項1記載の転舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、転舵制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
たとえば下記特許文献1には、操舵軸、中間軸、および伝達軸を介してステアリングホイールのトルクを転舵輪に伝達する装置が記載されている。ここで、操舵軸および中間軸と、中間軸および伝達軸と、は、それぞれ、ユニバーサルジョイントによって連結されている。また、この装置は、中間軸にトルクを付与するモータを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2003-205846号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
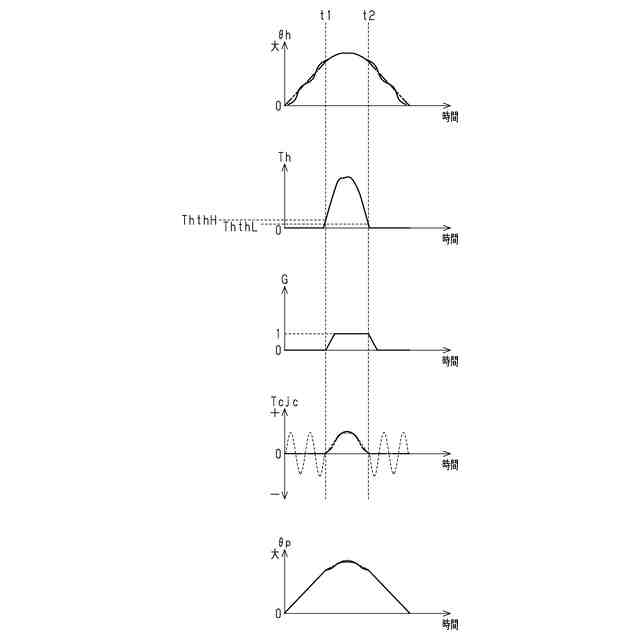
ところで、上記のようにユニバーサルジョイントを備える装置の場合、操舵軸に加わるトルクと伝達軸に加わるトルクとの比は、操舵角に応じて変動する。ここで、発明者は、ユニバーサルジョイントよりも転舵輪に近い位置にモータのトルクを付与することを検討した。その場合、転舵輪に近い位置のトルクが操舵角に依存して変動しないように制御すると、操舵軸に加わるトルクが操舵角に応じて変動する。操舵軸に加わるトルクが操舵角に応じて変動すると、運転者に違和感を抱かせるおそれがある。
【課題を解決するための手段】
【0005】
以下、上記課題を解決するための手段およびその作用効果について記載する。
1.転舵装置を制御対象とする転舵制御装置であって、
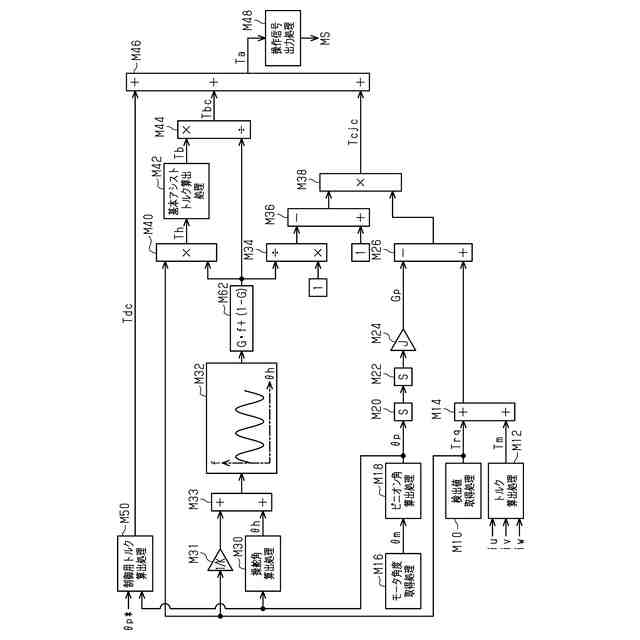
前記転舵装置は、ステアリングホイール、入力軸、中間軸、出力軸、第1カルダンジョイント、第2カルダンジョイント、アシストモータおよび転舵輪を備え、前記入力軸は前記ステアリングホイールに連結されており、前記第1カルダンジョイントは、前記入力軸および前記中間軸を連結する部材であり、前記第2カルダンジョイントは、前記中間軸および前記出力軸を連結する部材であり、前記転舵輪には、前記ステアリングホイールに入力される操舵トルクが、前記入力軸、前記中間軸、および前記出力軸を介して伝達され、前記アシストモータは、前記第2カルダンジョイントよりも前記転舵輪に近い位置にトルクを付与するモータであり、舵角変数取得処理、アシストトルク変数算出処理、制御用トルク取得処理、操作処理、変動トルク制御処理、および制限処理を実行するように構成され、前記舵角変数取得処理は、操舵角変数の値を取得する処理であり、前記操舵角変数は、前記ステアリングホイールの角度である操舵角を示す変数であり、前記アシストトルク変数算出処理は、アシストトルク変数の値を算出する処理であり、前記アシストトルク変数は、前記ステアリングホイールの操作に応じた運転者の操舵をアシストするためのトルクを示す変数であり、前記制御用トルク取得処理は、制御用トルク変数の値を取得する処理であり、前記制御用トルク変数は、前記ステアリングホイールの操作とは独立に車両の走行方向を制御するためのトルクを示す変数であり、前記操作処理は、前記アシストトルク変数の値および前記制御用トルク変数の値の2つのうちの少なくとも1つに応じたトルクに応じて前記アシストモータの駆動回路を操作する処理であり、前記変動トルク制御処理は、入力変数としての前記操舵角変数の値に基づき、前記操作処理の入力変数としてのトルクを前記操舵角に応じて変動させる処理であり、前記制限処理は、前記操作処理の入力変数としてのトルクの前記操舵角に応じた変動の大きさを、前記操作処理における前記制御用トルク変数の値の優先度に応じて小さい側に制限する処理である転舵制御装置。
【0006】
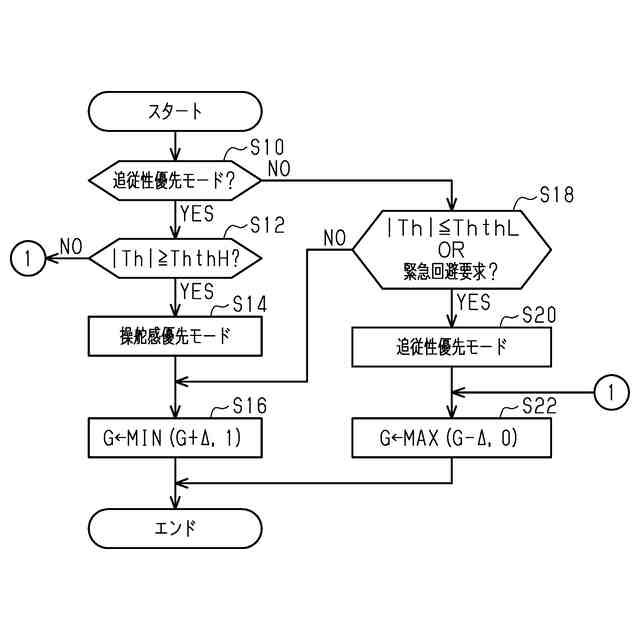
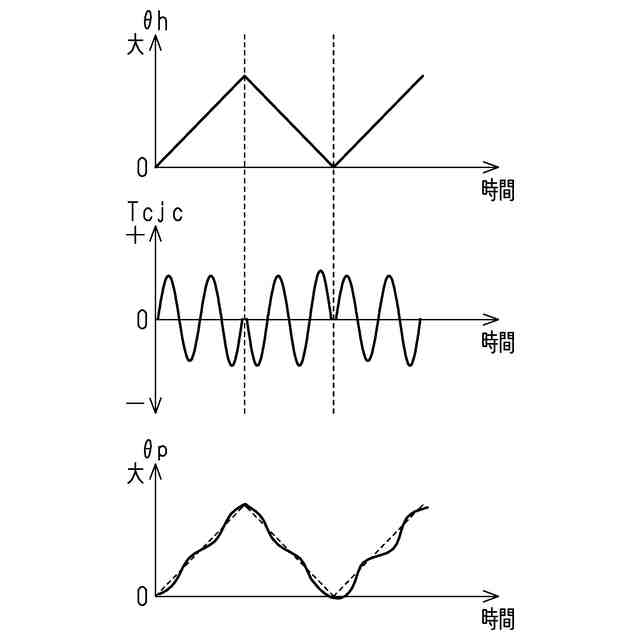
上記構成において、第2カルダンジョイントよりも転舵輪に近い位置のトルクと操舵トルクとの比は、操舵角変数の値に応じて変動する。そのため、操舵トルクの変動を抑制すると、第2カルダンジョイントよりも転舵輪に近い位置のトルクが変動する。そのため、上記構成では、アシストモータのトルクを操舵角に応じて変動させる。これにより、操舵トルクの変動を抑制することが可能となる。
【0007】
ただし、アシストモータのトルクを変動させることは、制御用トルク変数の値による狙いとする車両の挙動制御に干渉しうる。そこで上記構成では、制御用トルク変数の値の優先度に応じて上記変動の大きさを小さい側に制限する。これにより、操舵トルクの変動を抑制することと、制御用トルク変数の値による制御性を高く維持することとの好適な折衷を図ることができる。
【0008】
2.操舵トルク変数取得処理を実行するように構成され、前記操舵トルク変数取得処理は、操舵トルクを示す変数である操舵トルク変数の値を取得する処理であり、前記制限処理は、入力変数としての前記操舵トルク変数の値に応じて前記優先度を把握する処理を含む上記1記載の転舵制御装置。
【0009】
操舵トルクは、運転者による操舵の意思を示す変数である。そのため、操舵トルク変数の値は、運転者の操舵と制御用トルク変数の値による操舵との優先度を定めるのに適した変数である。そのため、上記構成では、優先度を適切に設定できる。
【0010】
3.前記制限処理は、前記車両の外部の情報に応じて前記制御用トルク変数の値の優先度を定める信号に基づき前記優先度を把握する処理を含む上記1または2記載の転舵制御装置。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
1か月前
個人
走行装置
2か月前
個人
乗り物
3か月前
個人
電動走行車両
2か月前
個人
電動モビリティ
6か月前
個人
折り畳み自転車
9か月前
個人
発音装置
6か月前
個人
閂式ハンドル錠
2か月前
個人
ボギー・フレーム
14日前
個人
自転車用傘捕捉具
10か月前
個人
自由方向乗車自転車
6か月前
個人
“zen-go.”
1か月前
個人
体重掛けリフト台車
9か月前
個人
ルーフ付きトライク
1か月前
個人
ルーフ付きトライク
6日前
個人
パワーアシスト自転車
15日前
個人
アタッチメント
10か月前
個人
自転車用荷物台
9か月前
個人
キャンピングトライク
7か月前
個人
ステアリングの操向部材
7か月前
株式会社CPM
駐輪機
10か月前
個人
フロントフットブレーキ。
2か月前
株式会社三五
リアサブフレーム
9か月前
株式会社豊田自動織機
産業車両
3か月前
学校法人千葉工業大学
車両
8か月前
学校法人千葉工業大学
車両
8か月前
ダイハツ工業株式会社
車両
11か月前
学校法人千葉工業大学
車両
8か月前
豊田鉄工株式会社
小型車両
1か月前
豊田合成株式会社
操舵装置
10か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
10か月前
個人
ホイールハブ駆動構造
2か月前
ヤマハ発動機株式会社
車両
10か月前
個人
走行車両等の粉塵飛散防止装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ