TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119449
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2024014342
出願日
2024-02-01
発明の名称
車両
出願人
船井電機株式会社
代理人
個人
,
個人
主分類
B62K
5/08 20060101AFI20250806BHJP(鉄道以外の路面車両)
要約
【課題】旋回時の走行安定性を向上させることが可能な車両を提供する。
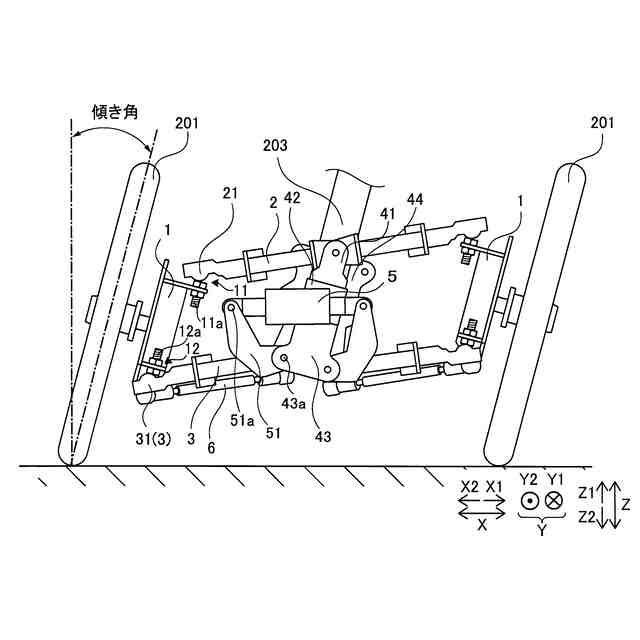
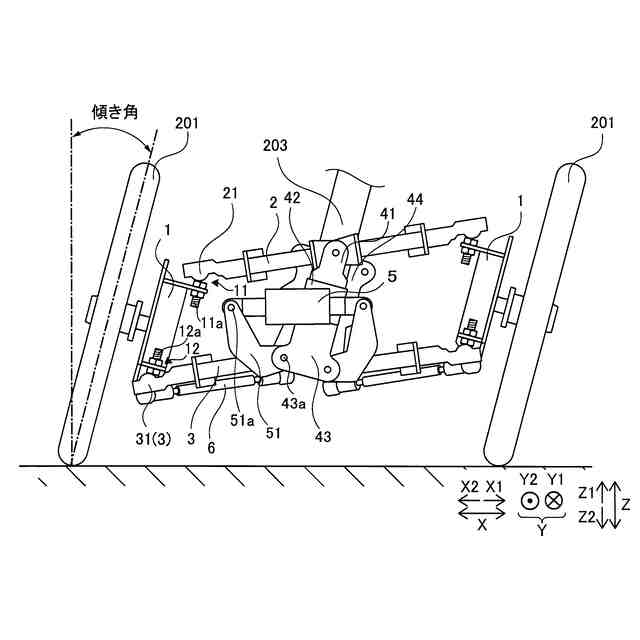
【解決手段】この三輪車200(車両)は、チルト機構が2つの前輪201を傾かせることによって生じる2つの前輪201の各々の舵角差が10°以内になるように、進行方向から見たロアアーム3の長さaとタイロッド6の長さbとの比であるアーム長さ比a/b、および、チルト機構により2つの前輪201が傾いていない正立時における、進行方向から見たロアアーム3とタイロッド6とが成す角度であるアーム間角度θを調整する。
【選択図】図6
特許請求の範囲
【請求項1】
進行方向に回転する2つの前輪を有する車両であって、
前記前輪を鉛直方向に対して前記車両の車幅方向に傾かせるとともに、前記2つの前輪の各々に接続されている2つの懸架部に接続されている下方アーム部を含むチルト機構と、
前記車両の操舵に応じて前記前輪の舵角を変更するとともに、前記進行方向から見て前記下方アーム部の下方側または同一高さに配置されるように前記2つの懸架部に接続されている操舵アーム部を含むステアリング機構と、を備え、
前記チルト機構が前記前輪を傾かせることによって生じる前記2つの前輪の各々の舵角差が10°以内になるように、前記進行方向から見た前記下方アーム部の長さaと前記操舵アーム部の長さbとの比であるアーム長さ比a/b、および、前記チルト機構により前記前輪が傾いていない正立時における、前記進行方向から見た前記下方アーム部と前記操舵アーム部とが成す角度であるアーム間角度θが調整されている、車両。
続きを表示(約 1,700 文字)
【請求項2】
横軸に、前記アーム間角度θをとり、縦軸に、前記アーム長さ比a/bをとるグラフにおいて、実験またはシミュレーションにより取得された前記チルト機構が前記前輪を10°~25°傾かせることによって生じる前記2つの前輪の各々の舵角差が10°以内となる前記アーム長さ比a/bの範囲に基づいて、前記アーム間角度θの絶対値である|θ|が|θ|≦10°である場合における前記アーム長さ比a/bが、前記アーム長さ比a/bの範囲の最小値を結ぶ最小ラインと、前記アーム長さ比a/bの範囲の最大値を結ぶ最大ラインとの間となるように、前記アーム間角度θおよび前記アーム長さ比a/bが調整されている、請求項1に記載の車両。
【請求項3】
前記チルト機構および前記ステアリング機構は、前記進行方向から見て前記車幅方向の一方側と他方側とが線対称である構造を有するように構成されており、
前記グラフにおいて、前記車幅方向の一方側において、前記進行方向から見て、前記下方アーム部と前記操舵アーム部とが前記車幅方向の外側に向かって広がる場合にプラスとなり、前記進行方向から見て前記下方アーム部と前記操舵アーム部とが前記車幅方向の外側に向かって近づく場合にマイナスとなる前記アーム間角度θが-10°≦θ≦10°であり、かつ、前記アーム長さ比a/bが0.76≦a/b≦0.96である第1領域と、前記アーム間角度θが-10°≦θ≦2.5°であり、かつ、前記アーム長さ比a/bが0.74≦a/b≦1.06である第2領域と、前記アーム間角度θが-5°≦θ≦0°であり、かつ、前記アーム長さ比a/bが0.74≦a/b≦1.14である第3領域とにより構成される領域の範囲内になるように、前記アーム間角度θおよび前記アーム長さ比a/bが調整されている、請求項2に記載の車両。
【請求項4】
前記グラフにおいて、前記第2領域と前記第3領域とにより構成される領域の範囲内になるように、前記アーム間角度θおよび前記アーム長さ比a/bが調整されている、請求項3に記載の車両。
【請求項5】
前記グラフにおいて、前記第3領域の範囲内になるように、前記アーム間角度θおよび前記アーム長さ比a/bが調整されている、請求項4に記載の車両。
【請求項6】
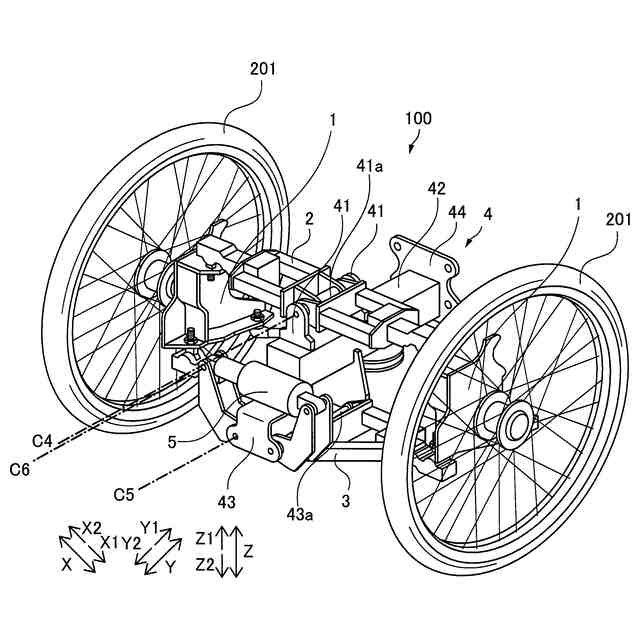
前記チルト機構は、前記2つの懸架部と、前記2つの懸架部の各々の上方側に接続されている上方アーム部と、前記2つの懸架部の各々の下方側に接続されている前記下方アーム部と、前記上方アーム部および前記下方アーム部を連結するとともに、前記車両のフレームと接続されている本体部と、を備える第1リンク機構により構成されており、
前記ステアリング機構は、前記2つの懸架部と、前記操舵アーム部と、前記進行方向と前記車幅方向とに直交する第1軸線を中心として回動可能であるとともに、前記本体部と前記操舵アーム部とを連結する回動部と、を備える第2リンク機構により構成されている、請求項1に記載の車両。
【請求項7】
前記2つの懸架部は、前記上方アーム部および前記下方アーム部と接続されている関節部を含み、
前記関節部は、前記車幅方向以外の揺動動作が規制されている、請求項6に記載の車両。
【請求項8】
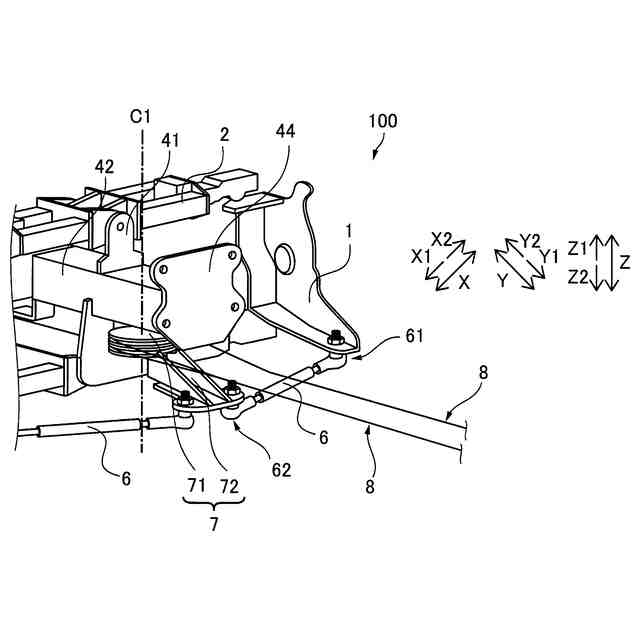
前記ステアリング機構は、前記車両の操舵に応じて張力が付与されるひも状部材が嵌め込まれる第1プーリを含み、
前記第1プーリにおける前記ひも状部材が接する部分は、前記第1プーリの回転軸線方向から見て非円形形状を有する、請求項1に記載の車両。
【請求項9】
前記車両の操舵に応じて回動されることにより前記ひも状部材に張力を付与する第2プーリをさらに備え、
前記第2プーリにおける前記ひも状部材が接する部分は、前記第2プーリの回転軸線方向から見て非円形形状を有する、請求項8に記載の車両。
【請求項10】
前記非円形形状を有する前記第1プーリに嵌め込まれる前記ひも状部材を押圧する張力調整部をさらに備え、
前記張力調整部は、前記ひも状部材を押圧することにより前記ひも状部材に張力を付与するように構成されている、請求項8に記載の車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、車両に関し、特に、鉛直方向に対して車幅方向に傾く2つの前輪を有する車両に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、鉛直方向に対して車幅方向に傾く2つの前輪を有する車両が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、鉛直方向に対して車幅方向に傾く2つの前輪を有する三輪自転車(車両)が開示されている。上記特許文献1では、三輪自転車(車両)は、ハンドルが接続されたハンドルポストと、2つの前輪を転向可能に支持する一対のサイドポストとが回動可能に連結された構造(チルト機構)を備える。そして、上記構造(チルト機構)は、ハンドルポストの左右への傾きに応じて一対のサイドポストを左右に傾けることにより、2つの前輪を揺動する(傾ける)ことが可能となる。
【先行技術文献】
【特許文献】
【0004】
特開2014-19281号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載のような三輪自転車(車両)では、2つの前輪を鉛直方向に対して車幅方向に傾けることが可能である。一方で、上記特許文献1に記載のような従来の三輪自転車(車両)では、2つの前輪を鉛直方向に対して車幅方向に傾けることによって、2つの前輪の各々に舵角差が発生する場合がある。2つの前輪の各々の舵角差は、操作者に違和感を感じさせるため、旋回時の走行安定性が低下する。このため、2つの前輪を鉛直方向に対して車幅方向に傾けることによって生じる2つの前輪の各々の舵角差に起因する操作者の違和感を抑制することにより、旋回時の走行安定性を向上させることが可能な車両が望まれている。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、旋回時の走行安定性を向上させることが可能な車両を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本願発明者が鋭意検討した結果、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差が10°以内の場合に、操作者が違和感を感じずに旋回できることを見出した。また、本願発明者は、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差は、進行方向から見た下方アーム部の長さaと操舵アーム部の長さbとの比であるアーム長さ比a/b、および、チルト機構により前輪が傾いていない正立時における、進行方向から見た下方アーム部と操舵アーム部とが成す角度であるアーム間角度θと相関関係があり、アーム長さ比a/bおよびアーム間角度θを調整することにより、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差を10°以内とすることができることを実験およびシミュレーションにより見出した。
【0008】
すなわち、この発明の一の局面による車両は、進行方向に回転する2つの前輪を有する車両であって、前輪を鉛直方向に対して車両の車幅方向に傾かせるとともに、2つの前輪の各々に接続されている2つの懸架部に接続されている下方アーム部を含むチルト機構と、車両の操舵に応じて前輪の舵角を変更するとともに、進行方向から見て下方アーム部の下方側または同一高さに配置されるように2つの懸架部に接続されている操舵アーム部を含むステアリング機構と、を備え、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差が10°以内になるように、進行方向から見た下方アーム部の長さaと操舵アーム部の長さbとの比であるアーム長さ比a/b、および、チルト機構により前輪が傾いていない正立時における、進行方向から見た下方アーム部と操舵アーム部とが成す角度であるアーム間角度θが調整されている。ここで、本発明の車両とは、2つの前輪を有する自転車、自動二輪車および三輪車などの鞍乗型車両、キックボードおよびリカンベントタイプの自転車などを含む広い概念である。
【0009】
この一の局面による車両は、上記のように、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差が10°以内になるように、進行方向から見た下方アーム部の長さaと操舵アーム部の長さbとの比であるアーム長さ比a/b、および、チルト機構により前輪が傾いていない正立時における、進行方向から見た下方アーム部と操舵アーム部とが成す角度であるアーム間角度θを調整することによって、2つの前輪を鉛直方向に対して車幅方向に傾かせることによって生じる2つの前輪の各々の舵角差に起因する操作者の違和感を抑制することができる。その結果、旋回時の走行安定性を向上することができる。
【0010】
上記一の局面による車両において、好ましくは、横軸に、アーム間角度θをとり、縦軸に、アーム長さ比a/bをとるグラフにおいて、実験またはシミュレーションにより取得されたチルト機構が前輪を10°~25°傾かせることによって生じる2つの前輪の各々の舵角差が10°以内となるアーム長さ比a/bの範囲に基づいて、アーム間角度θの絶対値である|θ|が|θ|≦10°である場合におけるアーム長さ比a/bが、アーム長さ比a/bの範囲の最小値を結ぶ最小ラインと、アーム長さ比a/bの範囲の最大値を結ぶ最大ラインとの間となるように、アーム間角度θおよびアーム長さ比a/bが調整されている。ここで、本願発明者は、アーム間角度θの絶対値である|θ|が|θ|≦10°である場合における、チルト機構が前輪を25°傾かせることによって生じる2つの前輪の各々の舵角差が10°以内となるアーム長さ比a/bの範囲を実験およびシミュレーションにより算出した。この算出したアーム長さ比a/bの範囲内になるように、アーム間角度θおよびアーム長さ比a/bを調整すれば、容易に、アーム間角度θおよびアーム長さ比a/bを調整することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る





 特許ウォッチ
特許ウォッチ