TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025144415
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024044173
出願日
2024-03-19
発明の名称
車両の設計方法
出願人
船井電機株式会社
代理人
個人
,
個人
主分類
B62K
5/10 20130101AFI20250925BHJP(鉄道以外の路面車両)
要約
【課題】旋回時の走行安定性を向上させた車両を設計することが可能な車両の設計方法を提供する。
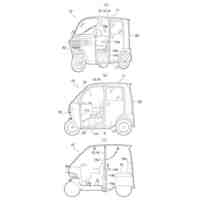
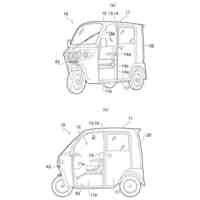
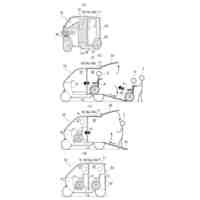
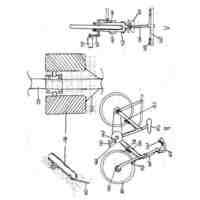
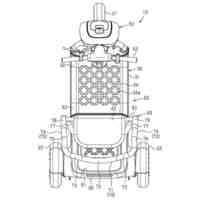
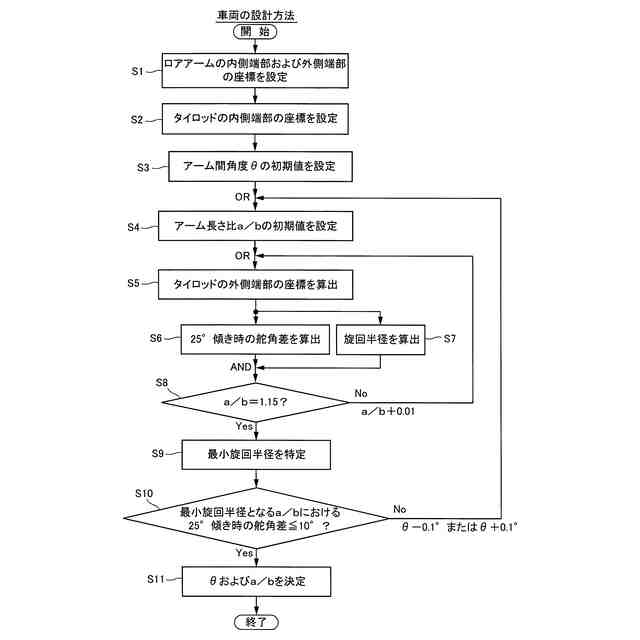
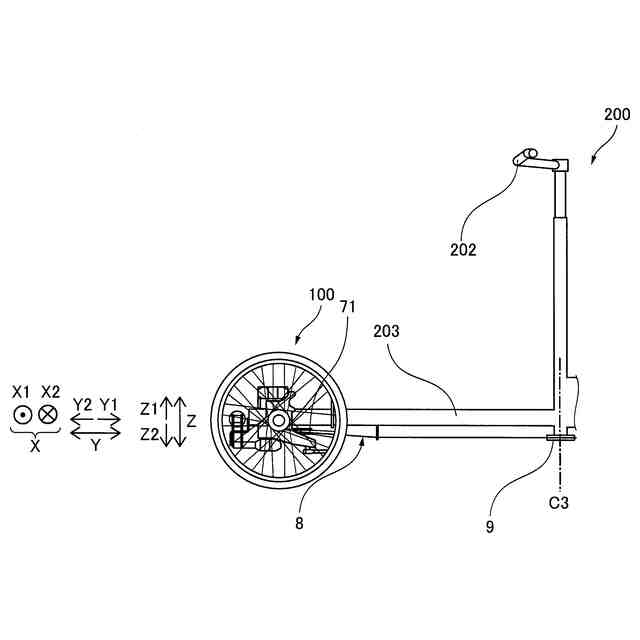
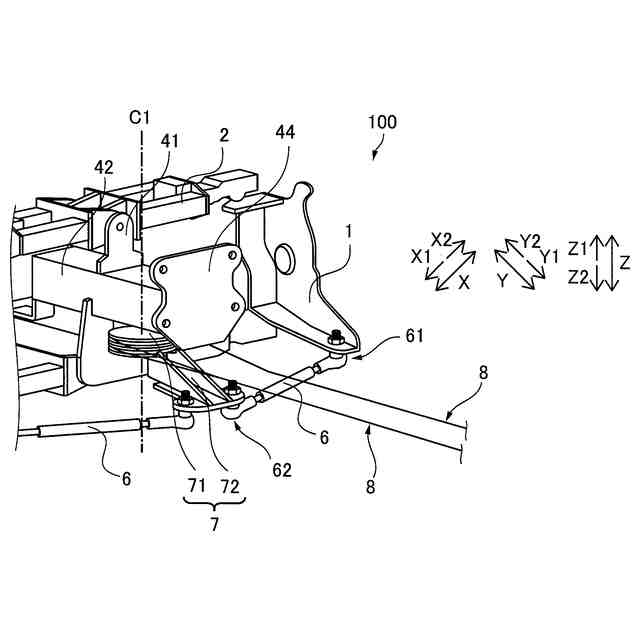
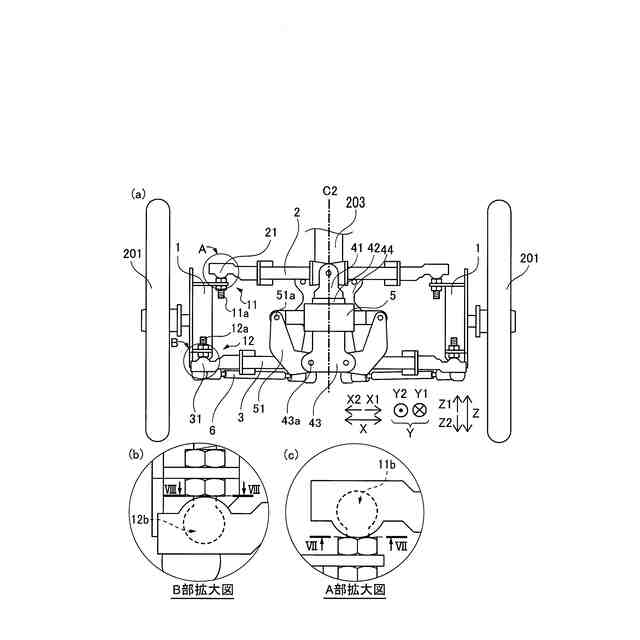
【解決手段】この三輪車200(車両)の設計方法は、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差が10°以内となるように、チルト機構により前輪が傾いていない正立時における、進行方向から見た下方アーム部と操舵アーム部とが成す角度であるアーム間角度θ、および、進行方向から見た下方アーム部の長さaと操舵アーム部の長さbとの比であるアーム長さ比a/bを決定する。
【選択図】図11
特許請求の範囲
【請求項1】
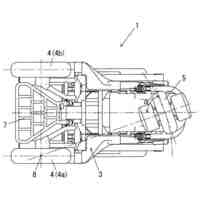
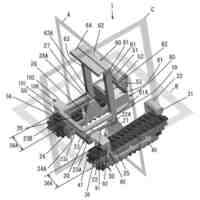
車両の進行方向に回転する2つの前輪を有し、前記前輪を鉛直方向に対して前記車両の車幅方向に傾かせるとともに、前記2つの前輪の各々に接続されている2つの懸架部に接続されている下方アーム部を含むチルト機構と、前記車両の操舵に応じて前記前輪の舵角を変更するとともに、前記進行方向から見て前記下方アーム部の下方側または同一高さに配置されるように前記2つの懸架部に接続されている操舵アーム部を含むステアリング機構と、を備える前記車両の設計方法であって、
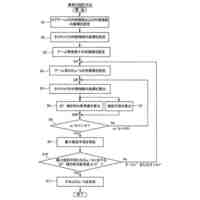
前記チルト機構により前記前輪が傾いていない正立時における、前記進行方向から見た前記下方アーム部と前記操舵アーム部とが成す角度であるアーム間角度θと、前記進行方向から見た前記下方アーム部の長さaと前記操舵アーム部の長さbとの比であるアーム長さ比a/bとに基づいて、前記チルト機構が前記前輪を傾かせることによって生じる前記2つの前輪の各々の舵角差を算出する舵角差算出工程と、
前記舵角差算出工程において算出された前記舵角差が10°以内となるように、前記アーム間角度θおよび前記アーム長さ比a/bを決定するアーム配置決定工程と、を備える、車両の設計方法。
続きを表示(約 1,400 文字)
【請求項2】
前記舵角差算出工程は、前記アーム間角度θを第1範囲内において変化させること、および、前記アーム長さ比a/bを第2範囲内において変化させることのうち少なくとも一方を行うことにより複数の前記舵角差を算出する工程を含む、請求項1に記載の車両の設計方法。
【請求項3】
前記第2範囲は、前記アーム長さ比a/b=1近傍の範囲である、請求項2に記載の車両の設計方法。
【請求項4】
前記舵角差算出工程は、前記アーム間角度θを所定の値に固定した状態で、前記アーム長さ比a/bを前記第2範囲内において変化させることにより、複数の前記舵角差を算出するとともに、算出された複数の前記舵角差が10°以内ではない場合に、10°以内となる前記舵角差が算出されるまで、前記アーム間角度θを前記所定の値から前記第1範囲内において変化させて前記舵角差の算出を繰り返す工程を含む、請求項2に記載の車両の設計方法。
【請求項5】
前記舵角差算出工程は、前記アーム間角度θを前記第1範囲内において第1変化量で変化させること、および、前記アーム長さ比a/bを前記第2範囲内において第2変化量で変化させることのうち少なくとも一方を行うことにより複数の前記舵角差を算出する工程を含む、請求項2に記載の車両の設計方法。
【請求項6】
前記第1変化量は、0.1°であり、
前記第2変化量は、0.01である、請求項5に記載の車両の設計方法。
【請求項7】
前記アーム間角度θを前記第1範囲内において変化させること、および、前記アーム長さ比a/bを前記第2範囲内において変化させることのうち少なくとも一方を行うことにより、前記車両の旋回半径を複数算出する旋回半径算出工程をさらに備え、
前記アーム配置決定工程は、前記舵角差算出工程において算出された前記舵角差が10°以内となり、かつ、前記旋回半径算出工程において算出された前記旋回半径が、同一の前記アーム間角度θに基づいて算出された複数の前記旋回半径の中で最小となるように、前記アーム間角度θおよび前記アーム長さ比a/bを決定する工程を含む、請求項2に記載の車両の設計方法。
【請求項8】
前記旋回半径算出工程は、前記アーム間角度θを所定の値に固定した状態で、前記アーム長さ比a/bを前記第2範囲内において変化させることにより、前記車両の旋回半径を複数算出する工程を含み、
前記舵角差算出工程は、前記アーム間角度θを前記所定の値に固定した状態で、前記アーム長さ比a/bを前記第2範囲内において変化させることにより、複数の前記舵角差を算出するとともに、算出された複数の前記舵角差のうち、前記旋回半径算出工程において同一の前記アーム間角度θに基づいて算出された複数の前記旋回半径の中で最小となる前記旋回半径と同じ前記アーム長さ比a/bに基づいて算出された最小旋回舵角差が10°以内ではない場合に、10°以内となる前記最小旋回舵角差が算出されるまで、前記アーム間角度θを前記所定の値から前記第1範囲内において変化させて、前記旋回半径算出工程および前記最小旋回舵角差の算出を繰り返す工程を含む、請求項7に記載の車両の設計方法。
【請求項9】
前記第1範囲は、前記アーム間角度θが|θ|≦10°の範囲であり、
前記第2範囲は、前記アーム長さ比a/b=1近傍の範囲である、請求項8に記載の車両の設計方法。
発明の詳細な説明
【技術分野】
【0001】
この発明は、車両の設計方法に関し、特に、鉛直方向に対して車幅方向に傾く2つの前輪を有する車両の設計方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、鉛直方向に対して車幅方向に傾く2つの前輪を有する車両が知られている(たとえば、特許文献1参照)。
【0003】
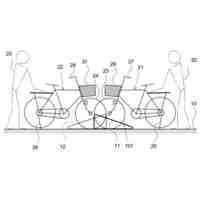
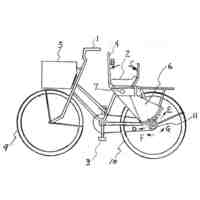
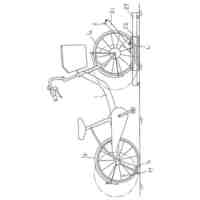
上記特許文献1には、鉛直方向に対して車幅方向に傾く2つの前輪を有する三輪自転車(車両)が開示されている。上記特許文献1では、三輪自転車(車両)は、ハンドルが接続されたハンドルポストと、2つの前輪を転向可能に支持する一対のサイドポストとが回動可能に連結された構造(チルト機構)を備える。そして、上記構造(チルト機構)は、ハンドルポストの左右への傾きに応じて一対のサイドポストを左右に傾けることにより、2つの前輪を揺動する(傾ける)ことが可能となる。
【先行技術文献】
【特許文献】
【0004】
特開2014-19281号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載のような従来の三輪自転車(車両)では、2つの前輪を鉛直方向に対して車幅方向に傾けることによって、2つの前輪の各々に舵角差が発生する場合がある。2つの前輪の各々の舵角差は、操作者に違和感を感じさせ、旋回時の走行安定性を低下させる。このため、2つの前輪を鉛直方向に対して車幅方向に傾けることによって生じる2つの前輪の各々の舵角差に起因する操作者の違和感を抑制することにより、旋回時の走行安定性を向上させる車両、ひいては旋回時の走行安定性を向上させた車両を設計することが可能な車両の設計方法が望まれている。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、旋回時の走行安定性を向上させた車両を設計することが可能な車両の設計方法を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本願発明者が鋭意検討した結果、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差が10°以内の場合に、操作者が違和感を感じずに旋回できることを見出した。また、本願発明者は、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差は、進行方向から見た下方アーム部の長さaと操舵アーム部の長さbとの比であるアーム長さ比a/b、および、チルト機構により前輪が傾いていない正立時における、進行方向から見た下方アーム部と操舵アーム部とが成す角度であるアーム間角度θと相関関係があり、アーム長さ比a/bおよびアーム間角度θを調整することにより、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差を10°以内とすることができることを実験およびシミュレーションにより見出した。
【0008】
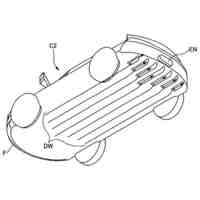
すなわち、この発明の一の局面による車両の設計方法は、車両の進行方向に回転する2つの前輪を有し、前輪を鉛直方向に対して車両の車幅方向に傾かせるとともに、2つの前輪の各々に接続されている2つの懸架部に接続されている下方アーム部を含むチルト機構と、車両の操舵に応じて前輪の舵角を変更するとともに、進行方向から見て下方アーム部の下方側または同一高さに配置されるように2つの懸架部に接続されている操舵アーム部を含むステアリング機構と、を備える車両の設計方法であって、チルト機構により前輪が傾いていない正立時における、進行方向から見た下方アーム部と操舵アーム部とが成す角度であるアーム間角度θと、進行方向から見た下方アーム部の長さaと操舵アーム部の長さbとの比であるアーム長さ比a/bとに基づいて、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差を算出する舵角差算出工程と、舵角差算出工程において算出された舵角差が10°以内となるように、アーム間角度θおよびアーム長さ比a/bを決定するアーム配置決定工程と、を備える。ここで、本発明の車両とは、2つの前輪を有する自転車、自動二輪車および三輪車などの鞍乗型車両、キックボードおよびリカンベントタイプの自転車などを含む広い概念である。
【0009】
この一の局面による車両の設計方法は、上記のように、チルト機構が前輪を傾かせることによって生じる2つの前輪の各々の舵角差(以下、上記舵角差と記載する)が10°以内となるように、チルト機構により前輪が傾いていない正立時における、進行方向から見た下方アーム部と操舵アーム部とが成す角度であるアーム間角度θ、および、進行方向から見た下方アーム部の長さaと操舵アーム部の長さbとの比であるアーム長さ比a/bを決定する。これにより、2つの前輪を鉛直方向に対して車幅方向に傾かせることによって生じる2つの前輪の各々の舵角差に起因する操作者の違和感を抑制することができる。その結果、旋回時の走行安定性を向上させた車両を設計することができる。
【0010】
上記一の局面による車両の設計方法において、好ましくは、舵角差算出工程は、アーム間角度θを第1範囲内において変化させること、および、アーム長さ比a/bを第2範囲内において変化させることのうち少なくとも一方を行うことにより複数の上記舵角差を算出する工程を含む。このように構成すれば、複数の上記舵角差が算出されるので、アーム間角度θおよびアーム長さ比a/bを変化させずに上記舵角差を算出する場合と比較して、10°以内となる上記舵角差が算出される可能性が高くなる。これにより、アーム間角度θおよびアーム長さ比a/bを容易に決定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
船井電機株式会社
車両の設計方法
2か月前
個人
カート
5か月前
個人
走行装置
5か月前
個人
三輪バイク
1か月前
個人
台車
18日前
個人
乗り物
7か月前
個人
電動走行車両
5か月前
個人
自転車用歩数計
1か月前
個人
閂式ハンドル錠
5か月前
個人
駐輪設備
3か月前
個人
発音装置
9か月前
個人
電動モビリティ
9か月前
個人
ボギー・フレーム
3か月前
個人
自由方向乗車自転車
9か月前
個人
三輪電動車両
1か月前
個人
ルーフ付きトライク
3か月前
個人
ルーフ付きトライク
4か月前
個人
“zen-go.”
4か月前
井関農機株式会社
作業車両
1か月前
個人
パワーアシスト自転車
3か月前
個人
キャンピングトライク
10か月前
個人
車の室内高温防止屋根
1か月前
個人
ステアリングの操向部材
10か月前
個人
電動式ルーフ付きトライク
10日前
個人
電動式ルーフ付きトライク
10日前
個人
電動式ルーフ付きトライク
10日前
個人
フロントフットブレーキ。
5か月前
井関農機株式会社
収穫作業車両
4日前
株式会社豊田自動織機
産業車両
6か月前
個人
ホイールハブ駆動構造
6か月前
豊田鉄工株式会社
小型車両
5か月前
学校法人千葉工業大学
車両
11か月前
学校法人千葉工業大学
車両
11か月前
個人
乗用自動車のディフューザー
2か月前
学校法人千葉工業大学
車両
11か月前
個人
自転車の駐輪場システム
7か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ