TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115470
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024009936
出願日
2024-01-26
発明の名称
コネクタ部品の接続方法及び装置
出願人
長野日本無線株式会社
代理人
個人
,
弁理士法人太陽国際特許事務所
主分類
B25J
13/08 20060101AFI20250731BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 生産設備の縮小に伴うコストダウンを図るとともに、スペース効率の向上を図る。生産設備が大掛かりになる不具合を解消し、生産効率及び生産能率の向上、更には生産性及び量産性を高める。
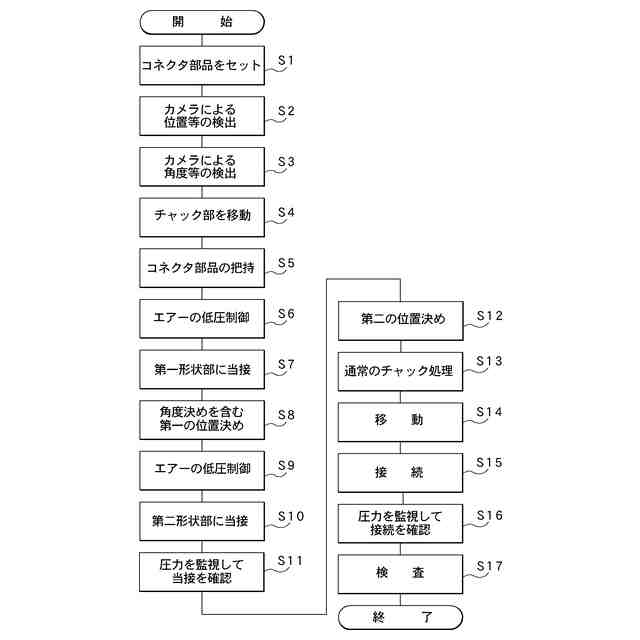
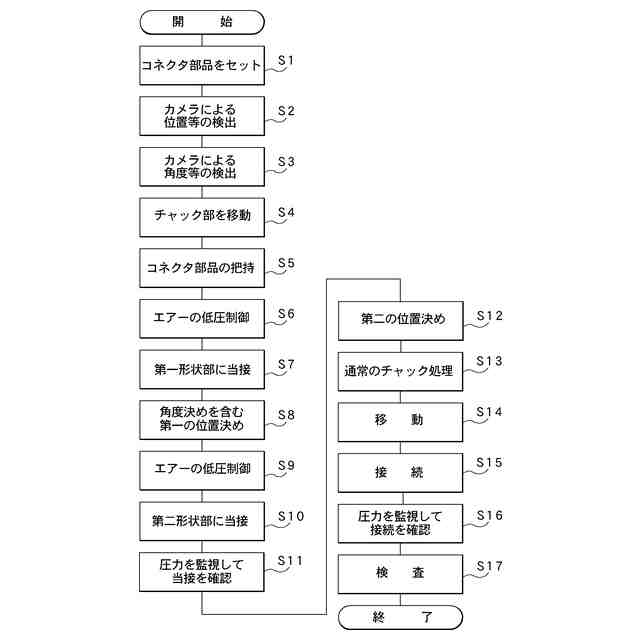
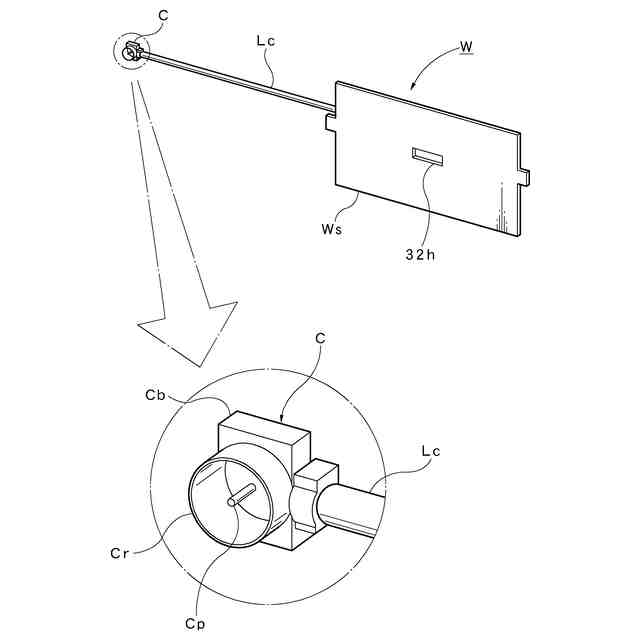
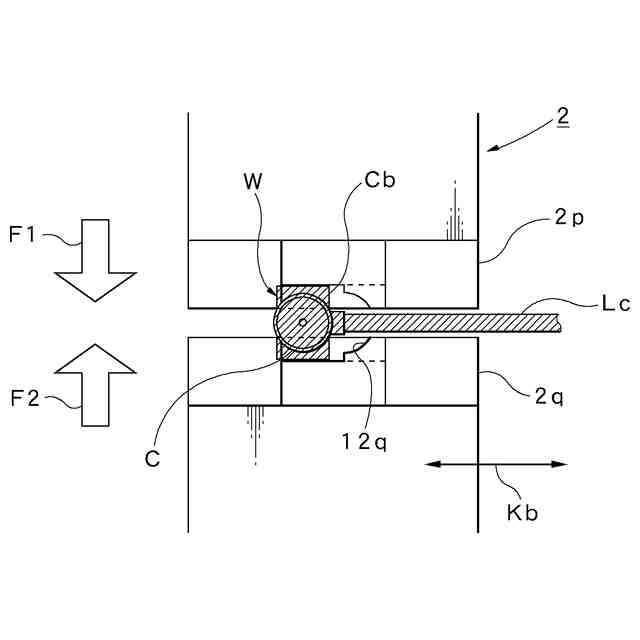
【解決手段】 コネクタ部品Wをカメラ4により撮像することにより位置と角度を検出し、この検出したデータに基づいてコネクタ部品Wをチャック機能部2により把持し、コネクタ部品Wを把持した状態で移動させ、第一の固定壁5に当接させて所定方向Kaに対する第一の位置決め及び角度決めを行うとともに、コネクタ部品Wを把持した状態で移動させ、コネクタ部品Wを第二の固定壁6に当接させて所定方向Kaに対して直角方向Kbとなる第二の位置決めを行い、この後、第一の位置決め及び第二の位置決めにより位置決めされたコネクタ部品Wを被接続部Jに接続する。
【選択図】 図1
特許請求の範囲
【請求項1】
セッティング部にセットされたコネクタ部品をチャック機能部により把持し、当該コネクタ部品を、固定された基板の被接続部に接続するコネクタ部品の接続方法において、セッティング部にセットした前記コネクタ部品をカメラにより撮像することにより位置と角度を検出し、この検出したデータに基づいて前記コネクタ部品を前記チャック機能部により把持し、前記コネクタ部品を把持した状態で移動させ、前記第一の固定壁に当接させて所定方向に対する第一の位置決め及び角度決めを行うとともに、前記コネクタ部品を把持した状態で移動させ、前記コネクタ部品を第二の固定壁に当接させて前記所定方向に対して直角方向となる第二の位置決めを行い、この後、前記第一の位置決め及び第二の位置決めにより位置決めされたコネクタ部品を前記被接続部に接続することを特徴とするコネクタ部品の接続方法。
続きを表示(約 1,000 文字)
【請求項2】
前記カメラは、前記コネクタ部品に対して直角関係となる二方向から撮像することを特徴とする請求項1記載のコネクタ部品の接続方法。
【請求項3】
前記チャック機能部は、前記第一の位置決めに対応する第一形状部を備えることを特徴とする請求項1記載のコネクタ部品の接続方法。
【請求項4】
前記チャック機能部は、前記第二の位置決めに対応する第二形状部を備えることを特徴とする請求項1記載のコネクタ部品の接続方法。
【請求項5】
前記第一の位置決め時には、前記チャック機能部によるチャック力を低圧に制御することを特徴とする請求項1記載のコネクタ部品の接続方法。
【請求項6】
前記第二の位置決め時には、前記チャック機能部によるチャック力を低圧に制御することを特徴とする請求項1記載のコネクタ部品の接続方法。
【請求項7】
セッティング部にセットされたコネクタ部品をチャック機能部で把持し、当該コネクタ部品を、固定された基板の被接続部に接続するコネクタ部品の接続装置において、前記コネクタ部品をカメラにより撮像することにより位置と角度を検出するコネクタ部品状態検出手段と、この検出したデータに基づいて前記コネクタ部品を前記チャック機能部により把持するコネクタ部品把持手段と、前記コネクタ部品把持手段により把持されたコネクタ部品を移動させることにより、前記第一の固定壁に当接させて所定方向に対する第一の位置決め及び角度決めを行う第一位置決め手段と、前記コネクタ部品把持手段により把持されたコネクタ部品を移動させることにより、前記コネクタ部品を前記第二の固定壁に当接させて前記所定方向に対して直角方向となる第二の位置決めを行う第二位置決め手段と、前記第一位置決め手段及び第二位置決め手段により位置決めされたコネクタ部品を前記被接続部に接続するコネクタ部品接続手段と、を備えることを特徴とするコネクタ部品の接続装置。
【請求項8】
前記チャック機能部は、前記第一の位置決めに対応する第一形状部を備えることを特徴とする請求項7記載のコネクタ部品の接続装置。
【請求項9】
前記チャック機能部は、前記第二の位置決めに対応する第二形状部を備えることを特徴とする請求項7記載のコネクタ部品の接続装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、セッティング部にセットされたコネクタ部品をチャック機能部により把持することにより基板に接続するコネクタ部品の接続方法及び装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、セッティング部にセットされたコネクタ部品(コネクタ)をチャック機能部により把持することにより基板(相手コネクタ)に接続するコネクタ部品の接続装置としては、特許文献1に記載されるコネクタ把持装置が知られている。
【0003】
このコネクタ把持装置は、コネクタ付きケーブルの検査作業や接続作業の自動化を図ることを目的としたものであり、具体的には、第1ロボットを動作させ、第1ハンドのロール対でコネクタ付きケーブルの中途部位を挟んだ後、第1ロボットの動作により第1ハンドをコネクタに接近させてコネクタを固定する。また、第1カメラでコネクタの画像を取得し、コネクタの位置・姿勢を求めるとともに、その位置・姿勢データに基づいて補正された把持位置へ第2ロボットを移動させ、コネクタの外周部分を第2ハンドで把持する。さらに、第1カメラでコネクタの画像を取得し、コネクタの検査を行なうとともに、第2カメラを用いて、相手コネクタの位置・姿勢のデータを取得し、第2ハンドの位置・姿勢を補正して、コネクタを相手コネクタに接続するようにしたものである。
【先行技術文献】
【特許文献】
【0004】
特開2005-11580号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述した従来におけるコネクタ部品の接続装置(コネクタ把持装置)は、次のような問題点があった。
【0006】
即ち、第1ロボットと第2ロボットの2台のロボットが必要になり、生産設備に伴うコストアップを招くことに加え、ロボットを設置する2台分の広いスペースが必要になるなどスペース効率の低下を招くとともに、生産設備が大掛かりになりやすい。しかも、2台の異なる機能を有するロボットが分担して各工程を進めるため、タクトタイムが長くなりやすい。この結果、生産効率及び生産能率の低下を招くなど、生産性及び量産性を高めることができない難点がある。
【0007】
本発明は、このような背景技術に存在する課題を解決したコネクタ部品の接続方法及び装置の提供を目的とするものである。
【課題を解決するための手段】
【0008】
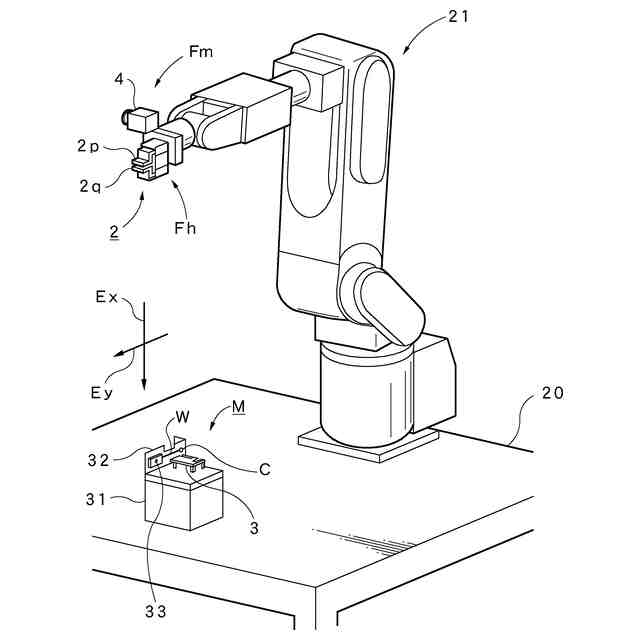
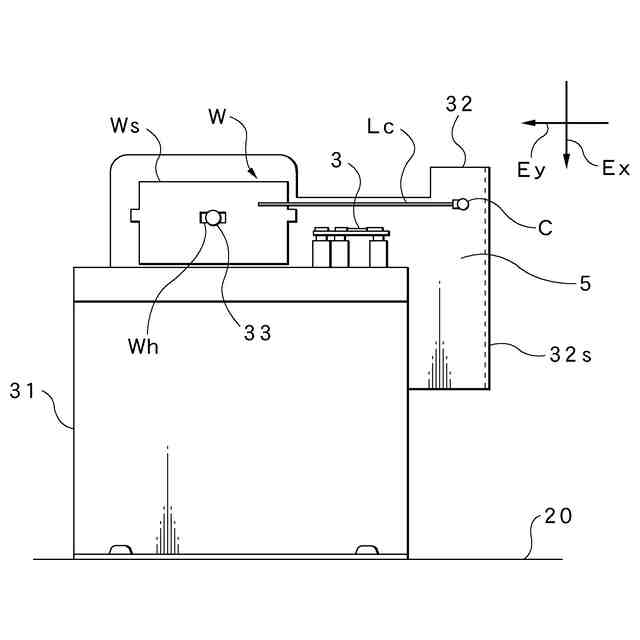
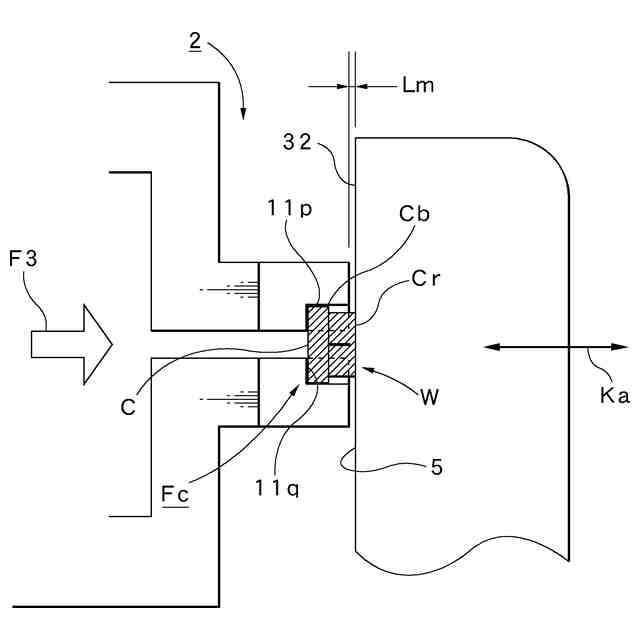
本発明に係るコネクタ部品Wの接続方法は、上述した課題を解決するため、セッティング部Mにセットされたコネクタ部品Wをチャック機能部2により把持し、当該コネクタ部品Wを固定された基板3の被接続部Jに接続するに際し、コネクタ部品Wをカメラ4により撮像することにより位置と角度を検出し、この検出したデータに基づいてコネクタ部品Wをチャック機能部2により把持し、コネクタ部品Wを把持した状態で移動させ、第一の固定壁5に当接させて所定方向Kaに対する第一の位置決め及び角度決めを行うとともに、コネクタ部品Wを把持した状態で移動させ、コネクタ部品Wを第二の固定壁6に当接させて所定方向Kaに対して直角方向Kbとなる第二の位置決めを行い、この後、第一の位置決め及び第二の位置決めにより位置決めされたコネクタ部品Wを被接続部Jに接続するようにしたことを特徴とする。
【0009】
また、本発明に係るコネクタ部品Wの接続装置1は、上述した課題を解決するため、セッティング部Mにセットされたコネクタ部品Wをチャック機能部2により把持し、当該コネクタ部品Wを固定された基板3の被接続部Jに接続する接続装置を構成するに際して、コネクタ部品Wをカメラ4により撮像することにより位置と角度を検出するコネクタ部品状態検出手段Fmと、この検出したデータに基づいてコネクタ部品Wをチャック機能部2により把持するコネクタ部品把持手段Fhと、コネクタ部品把持手段Fhにより把持されたコネクタ部品Wを移動させることにより、第一の固定壁5に当接させて所定方向Kaに対する第一の位置決め及び角度決めを行う第一位置決め手段Fcと、コネクタ部品把持手段Fhにより把持されたコネクタ部品Wを移動させることにより、コネクタ部品Wを第二の固定壁6に当接させて所定方向Kaに対して直角方向Kbとなる第二の位置決めを行う第二位置決め手段Fsと、第一位置決め手段Fc及び第二位置決め手段Fsにより位置決めされたコネクタ部品Wを被接続部Jに接続するコネクタ部品接続手段Fjと、を備えることを特徴とする。
【0010】
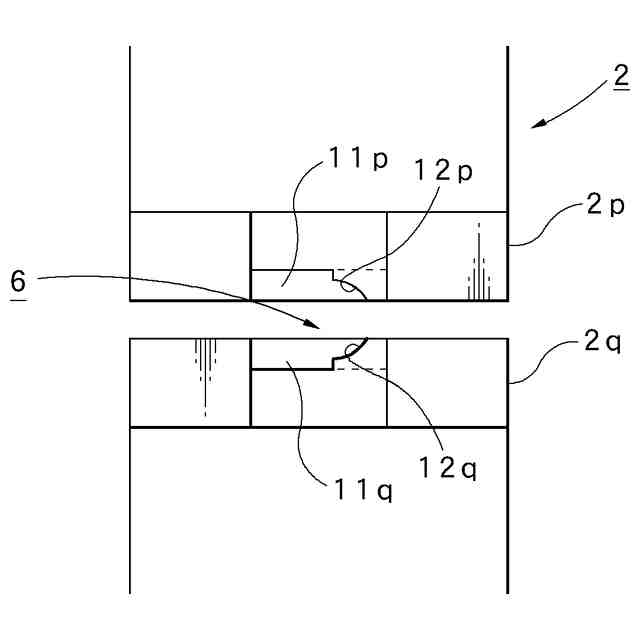
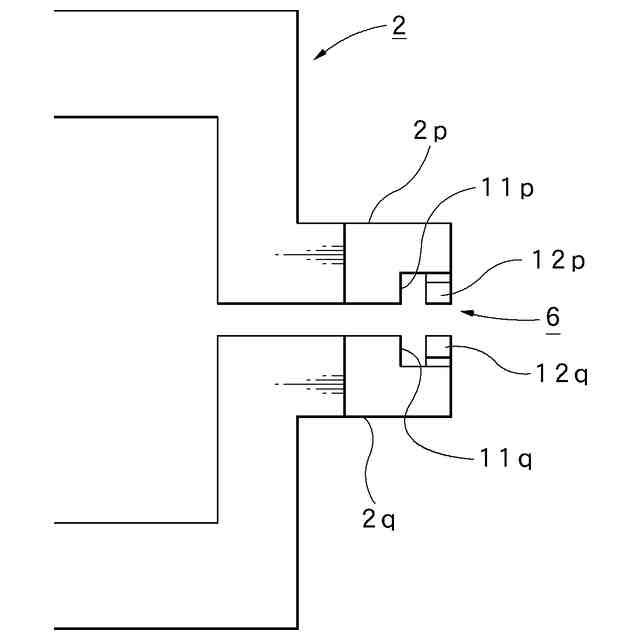
一方、本発明は、発明の好適な態様により、カメラ4は、コネクタ部品Wに対して直角関係となる二方向Ex,Eyから撮像することができる。また、チャック機能部2には、第一の位置決め及び角度決めに対応する第一形状部11p,11qを設けることができるとともに、第二の位置決めに対応する第二形状部12p,12qを設けることができる。さらに、第一の位置決め及び角度決め時には、チャック機能部2によるチャック力を低圧に制御することができるとともに、第二の位置決め時には、チャック機能部2によるチャック力を低圧に制御することができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
長野日本無線株式会社
コネクタ部品の接続方法及び装置
1か月前
個人
固定補助具
1か月前
個人
折りたたみ工具
17日前
株式会社ジャノメ
ロボット
2か月前
株式会社三協システム
製函機
15日前
CKD株式会社
把持装置
16日前
株式会社三協システム
移載装置
14日前
株式会社不二越
ロボット操作装置
22日前
住友重機械工業株式会社
教示装置
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボットシステム
28日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社ミクロブ
把持装置
16日前
SMC株式会社
着脱装置
15日前
太陽パーツ株式会社
アシストスーツ
17日前
日本精工株式会社
締結用工具
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
ARMA株式会社
ジョイントフレーム
29日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
エッジ仕上げ装置
6日前
株式会社不二越
ロボットシステム
14日前
住友重機械工業株式会社
支援装置
2か月前
株式会社不二越
ロボットシステム
17日前
住友重機械工業株式会社
支援装置
2か月前
株式会社不二越
垂直多関節ロボット
7日前
株式会社マキタ
電気機器
2か月前
トヨタ自動車株式会社
歩行ロボット
20日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
ライオン株式会社
移載システム
8日前
ダイハツ工業株式会社
移載治具
29日前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































