TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025111977
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024005942
出願日
2024-01-18
発明の名称
転舵制御装置
出願人
株式会社ジェイテクト
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250724BHJP(鉄道以外の路面車両)
要約
【課題】異常の有無を判定するのに要する時間を短縮できるようにした転舵制御装置を提供する。
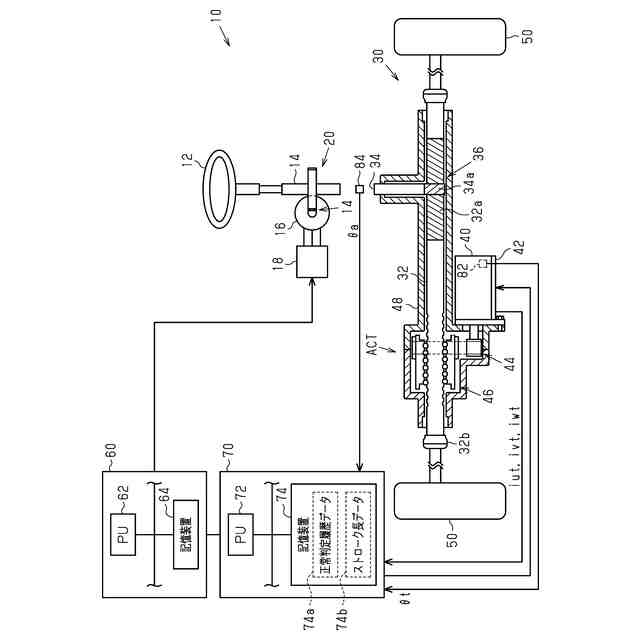
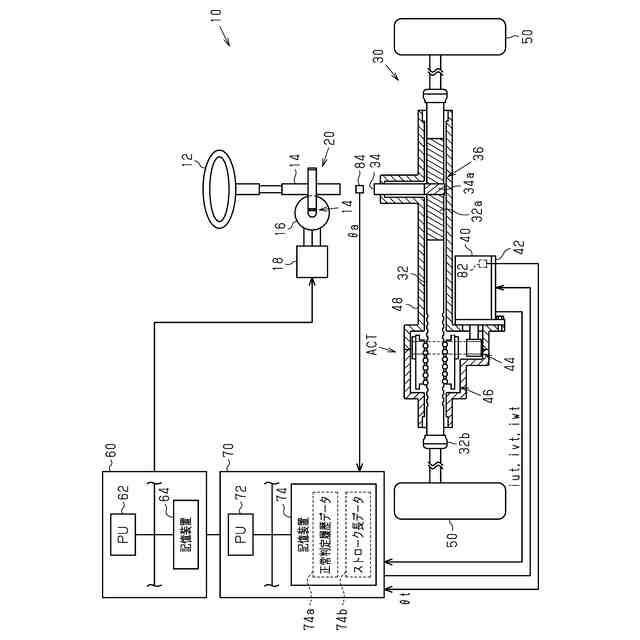
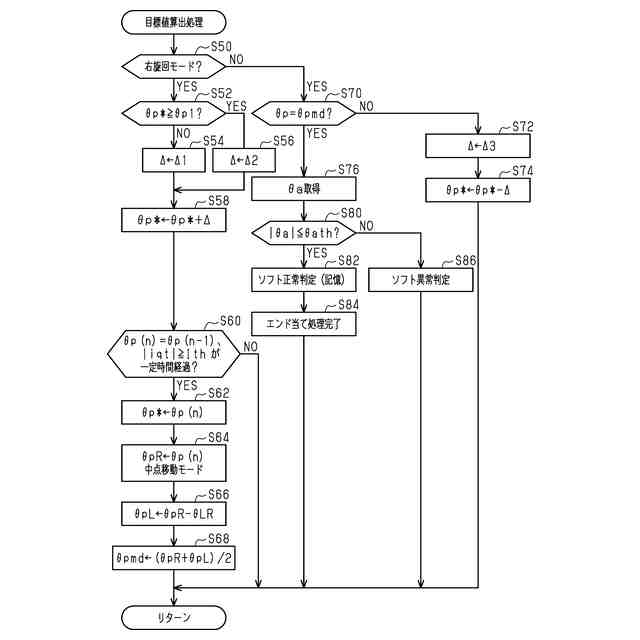
【解決手段】PU72は、転舵輪50を右旋回方向に最大限変位させる。PU72は、最大限変位させた際の転舵相当角と、ラックストローク長とに応じて、中立位置を算出する。そしてPU72は転舵相当角を中立位置に制御する。PU72は、中立位置において絶対角センサ84によって検出される絶対角θaの絶対値が閾値以下であるか否かに応じて、制御の異常の有無を判定する。
【選択図】図1
特許請求の範囲
【請求項1】
転舵輪が制御対象であって且つ前記転舵輪を転舵させるモータが操作対象である転舵制御装置であって、
旋回操作処理、エンド判定処理、最大変位変数取得処理、および判定処理を実行するように構成され、
前記旋回操作処理は、前記モータの操作によって、前記転舵輪を右旋回側および左旋回側のいずれか一方に最大限変位させる処理であり、
前記エンド判定処理は、前記転舵輪が前記最大限変位したか否かを判定する処理であり、
前記最大変位変数取得処理は、最大変位変数の値を取得する処理であり、
前記最大変位変数は、前記エンド判定処理によって前記最大限変位したと判定されることに基づき得られる変数であり、
前記判定処理は、前記最大変位変数の値に基づき、前記転舵輪の制御の異常の有無を判定する処理である転舵制御装置。
続きを表示(約 940 文字)
【請求項2】
前記最大変位変数の値は、前記エンド判定処理によって前記最大限変位したと判定されるときにおける前記モータの回転角の積算値である請求項1記載の転舵制御装置。
【請求項3】
初期値取得処理を実行するように構成され、
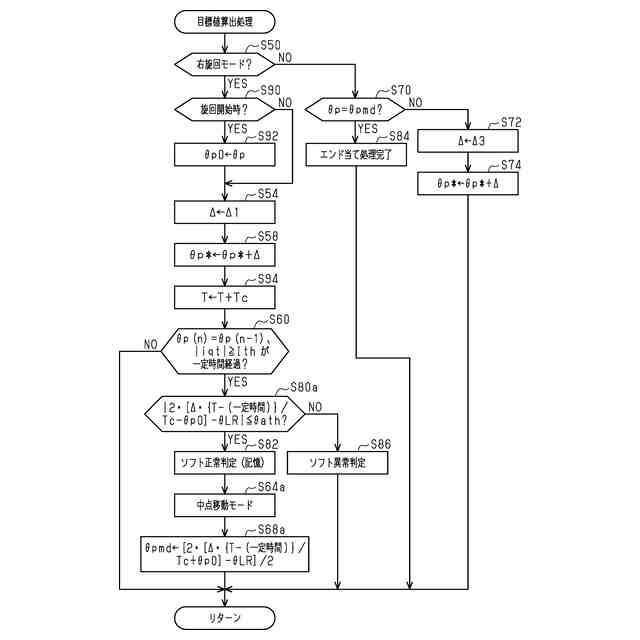
前記旋回操作処理は、前記モータの回転速度を目標回転速度に制御する処理を含み、
前記最大変位変数は、前記エンド判定処理によって前記最大限変位したと判定されるまでの経過時間を示す変数であり、
前記初期値取得処理は、前記経過時間の計時の開始時における転舵相当角を取得する処理であり、
前記転舵相当角は、前記転舵輪の転舵角を示す変数であり、
前記判定処理は、前記目標回転速度および前記初期値取得処理によって取得された値から定まる正常範囲に前記経過時間が入っているか否かに応じて、前記転舵輪の制御の異常の有無を判定する処理である請求項1記載の転舵制御装置。
【請求項4】
中点変数算出処理、および中点移動処理を実行するように構成され、
前記中点変数算出処理は、前記最大変位変数の値に基づき、前記転舵輪が中立位置に位置することを示す変数である中点変数の値を算出する処理であり、
前記中点移動処理は、入力変数としての前記中点変数の値に基づき、前記転舵輪を中立位置に変位させる処理である請求項1記載の転舵制御装置。
【請求項5】
前記エンド判定処理は、前記転舵輪の転舵角が変化しないことと前記モータの電流の絶対値が所定値以上であることとの論理積が真であることに基づき、前記転舵輪が前記最大限変位したと判定する処理である請求項1記載の転舵制御装置。
【請求項6】
記憶装置を備え、
モード設定処理を実行するように構成され、
前記モード設定処理は、前記記憶装置に前記判定処理の判定結果が記憶されていない場合に動作モードを検査モードに設定する処理を含み、
前記旋回操作処理、前記エンド判定処理、前記最大変位変数取得処理、および前記判定処理を、前記検査モードにおいて実行するように構成されている請求項1記載の転舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、転舵制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
下記特許文献1には、ステアリングホイールと転舵輪との動力の伝達が遮断されたシステムが記載されている。このシステムにおける車両用操向装置は、転舵角の中点位置を算出する。この装置は、転舵輪を右側方向に転舵させるように転舵モータを制御して右側最大転舵角を取得する。また、この装置は、転舵輪を左側方向に転舵させるように転舵モータを制御して左側最大転舵角を取得する。そしてこの装置は、右側最大転舵角と左側最大転舵角との中点を転舵輪の中立位置としている。
【先行技術文献】
【特許文献】
【0003】
特開2023-22874号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記処理のように、転舵輪の制御を正常に行うことを保証する処理に要する時間の短縮が求められている。
【課題を解決するための手段】
【0005】
以下、上記課題を解決するための手段およびその作用効果について記載する。
1.転舵輪が制御対象であって且つ前記転舵輪を転舵させるモータが操作対象である転舵制御装置であって、旋回操作処理、エンド判定処理、最大変位変数取得処理、および判定処理を実行するように構成され、前記旋回操作処理は、前記モータの操作によって、前記転舵輪を右旋回側および左旋回側のいずれか一方に最大限変位させる処理であり、前記エンド判定処理は、前記転舵輪が前記最大限変位したか否かを判定する処理であり、前記最大変位変数取得処理は、最大変位変数の値を取得する処理であり、前記最大変位変数は、前記エンド判定処理によって前記最大限変位したと判定されることに基づき得られる変数であり、前記判定処理は、前記最大変位変数の値に基づき、前記転舵輪の制御の異常の有無を判定する処理である転舵制御装置。
【0006】
転舵輪が最大限変位する際の転舵角は、予め把握可能である。そのため、上記構成では、最大限変位した際に得られる最大変位変数の値に基づき、転舵輪の制御の異常の有無を判定できる。そのため、転舵輪を右旋回側および左旋回側の双方に最大限変位させる処理を実行する場合と比較して、異常の有無を判定するのに要する時間を短縮できる。
【0007】
2.前記最大変位変数の値は、前記エンド判定処理によって前記最大限変位したと判定されるときにおける前記モータの回転角の積算値である上記1記載の転舵制御装置。
上記構成によれば、最大限変位した際の転舵角と上記積算値が示す転舵角とのずれに応じて異常の有無を判定できる。
【0008】
3.初期値取得処理を実行するように構成され、前記旋回操作処理は、前記モータの回転速度を目標回転速度に制御する処理を含み、前記最大変位変数は、前記エンド判定処理によって前記最大限変位したと判定されるまでの経過時間を示す変数であり、前記初期値取得処理は、前記経過時間の計時の開始時における転舵相当角を取得する処理であり、前記転舵相当角は、前記転舵輪の転舵角を示す変数であり、前記判定処理は、前記目標回転速度および前記初期値取得処理によって取得された値から定まる正常範囲に前記経過時間が入っているか否かに応じて、前記転舵輪の制御の異常の有無を判定する処理である上記1記載の転舵制御装置。
【0009】
上記初期値取得処理によって取得された値と最大限変位した際の転舵角とによれば、目標回転速度でモータを回転させた場合に最大限変位するまでに要する時間を把握可能である。そのため、上記経過時間についての正常範囲を定めることができる。そのため、上記構成では、経過時間に基づき異常の有無を判定できる。
【0010】
4.中点変数算出処理、および中点移動処理を実行するように構成され、前記中点変数算出処理は、前記最大変位変数の値に基づき、前記転舵輪が中立位置に位置することを示す変数である中点変数の値を算出する処理であり、前記中点移動処理は、入力変数としての前記中点変数の値に基づき、前記転舵輪を中立位置に変位させる処理である上記1~3のいずれか1つに記載の転舵制御装置。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
2か月前
個人
走行装置
2か月前
個人
電動走行車両
2か月前
個人
乗り物
4か月前
個人
駐輪設備
12日前
個人
閂式ハンドル錠
2か月前
個人
電動モビリティ
6か月前
個人
折り畳み自転車
9か月前
個人
発音装置
6か月前
個人
ボギー・フレーム
27日前
個人
自転車用傘捕捉具
10か月前
個人
ルーフ付きトライク
1か月前
個人
“zen-go.”
1か月前
個人
自由方向乗車自転車
6か月前
個人
体重掛けリフト台車
9か月前
個人
ルーフ付きトライク
19日前
個人
キャンピングトライク
7か月前
個人
アタッチメント
10か月前
個人
パワーアシスト自転車
28日前
個人
自転車用荷物台
10か月前
個人
ステアリングの操向部材
7か月前
株式会社CPM
駐輪機
10か月前
個人
フロントフットブレーキ。
3か月前
株式会社三五
リアサブフレーム
9か月前
株式会社豊田自動織機
産業車両
3か月前
ヤマハ発動機株式会社
車両
11か月前
ヤマハ発動機株式会社
車両
11か月前
学校法人千葉工業大学
車両
9か月前
豊田鉄工株式会社
小型車両
2か月前
ヤマハ発動機株式会社
車両
11か月前
個人
ホイールハブ駆動構造
3か月前
学校法人千葉工業大学
車両
9か月前
豊田合成株式会社
操舵装置
11か月前
学校法人千葉工業大学
車両
9か月前
ヤマハ発動機株式会社
車両
11か月前
ダイハツ工業株式会社
車両
11か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ