TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025098148
公報種別
公開特許公報(A)
公開日
2025-07-01
出願番号
2025050028,2021013735
出願日
2025-03-25,2021-01-29
発明の名称
表示システム及び表示方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
H04N
7/18 20060101AFI20250624BHJP(電気通信技術)
要約
【課題】可視光撮像装置により撮像される画像が不鮮明になる事象が発生しても、作業機械の周辺の状況を作業機械の操作者に提供すること。
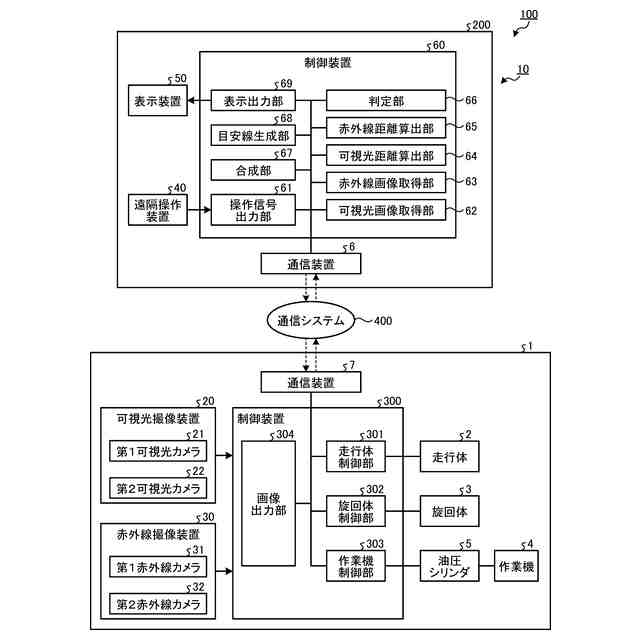
【解決手段】表示システムは、可視光撮像装置により撮像された第1対象の可視光画像を取得する可視光画像取得部と、赤外線撮像装置により撮像された第2対象の赤外線画像を取得する赤外線画像取得部と、可視光撮像装置から第1対象までの距離を示す可視光距離を複数の第1区画領域ごとに算出する可視光距離算出部と、赤外線撮像装置から第2対象までの距離を示す赤外線距離を複数の第2区画領域ごとに算出する赤外線距離算出部と、対応する第1区画領域及び第2区画領域ごとに可視光距離と赤外線距離との差が距離閾値以上か否かを判定する判定部と、差が距離閾値以上である第2区画領域と可視光画像とを合成して合成画像を生成する合成部と、合成画像が表示装置に表示されるように合成画像を出力する表示出力部とを備える。
【選択図】図4
特許請求の範囲
【請求項1】
作業機械に設けられた可視光撮像装置により撮像された第1対象の画像を示す可視光画像を取得する可視光画像取得部と、
前記作業機械に設けられた赤外線撮像装置により撮像された第2対象の画像を示す赤外線画像を取得する赤外線画像取得部と、
前記可視光撮像装置から前記第1対象までの距離を示す可視光距離を前記可視光画像に規定された複数の第1区画領域ごとに算出する可視光距離算出部と、
前記赤外線撮像装置から前記第2対象までの距離を示す赤外線距離を前記赤外線画像に前記第1区画領域に対応するように規定された複数の第2区画領域ごとに算出する赤外線距離算出部と、
対応する前記第1区画領域及び前記第2区画領域ごとに前記可視光距離と前記赤外線距離との差が距離閾値以上か否かを判定する判定部と、
前記差が距離閾値以上である前記第2区画領域と前記可視光画像とを合成して合成画像を生成する合成部と、
前記合成画像が表示装置に表示されるように前記合成画像を出力する表示出力部と、を備える、
表示システム。
続きを表示(約 1,100 文字)
【請求項2】
前記合成部は、前記差が距離閾値以上である前記第2区画領域が前記第2区画領域に対応する前記可視光画像の前記第1区画領域に重畳するように、前記第2区画領域と前記可視光画像とを合成する、
請求項1に記載の表示システム。
【請求項3】
前記合成画像は、前記差が距離閾値以上である前記第2区画領域と前記差が距離閾値未満である前記第1区画領域とを含む、
請求項1又は請求項2に記載の表示システム。
【請求項4】
前記可視光撮像装置は、第1可視光カメラと、第2可視光カメラと、を含み、
前記可視光距離算出部は、前記第1可視光カメラにより撮像された可視光画像と前記第2可視光カメラにより撮像された可視光画像とをステレオ処理することにより、前記可視光距離を算出する、
請求項1から請求項3のいずれか一項に記載の表示システム。
【請求項5】
前記赤外線撮像装置は、第1赤外線カメラと、第2赤外線カメラと、を含み、
前記赤外線距離算出部は、前記第1赤外線カメラにより撮像された赤外線画像と前記第2赤外線カメラにより撮像された赤外線画像とをステレオ処理することにより、前記赤外線距離を算出する、
請求項1から請求項4のいずれか一項に記載の表示システム。
【請求項6】
前記赤外線距離に基づいて前記作業機械からの距離を示す目安線画像を生成する目安線生成部を備え、
前記表示出力部は、前記目安線画像が前記表示装置に表示されるように前記目安線画像を出力する、
請求項1から請求項5のいずれか一項に記載の表示システム。
【請求項7】
作業機械に設けられた可視光撮像装置により撮像された第1対象の画像を示す可視光画像を取得することと、
前記作業機械に設けられた赤外線撮像装置により撮像された第2対象の画像を示す赤外線画像を取得することと、
前記可視光撮像装置から前記第1対象までの距離を示す可視光距離を前記可視光画像に規定された複数の第1区画領域ごとに算出することと、
前記赤外線撮像装置から前記第2対象までの距離を示す赤外線距離を前記赤外線画像に前記第1区画領域に対応するように規定された複数の第2区画領域ごとに算出することと、
対応する前記第1区画領域及び前記第2区画領域ごとに前記可視光距離と前記赤外線距離との差が距離閾値以上か否かを判定することと、
前記差が距離閾値以上である前記第2区画領域と前記可視光画像とを合成して合成画像を生成することと、
前記合成画像が表示装置に表示されるように前記合成画像を出力することと、を含む、
表示方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、表示システム及び表示方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
表示システムに係る技術分野において、特許文献1に開示されているような画像処理装置が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2018-106239号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械に係る技術分野において、作業機械の周辺を可視光撮像装置で撮像する技術が知られている。可視光撮像装置により撮像された画像が作業機械の操作者に提供されることにより、操作者は、作業機械の周辺の状況を確認することができる。作業機械の作業に起因して粉塵が発生する可能性がある。また、霧が発生している状況で作業機械の作業が実施される可能性がある。粉塵又は霧が発生すると、可視光撮像装置により撮像される画像が不鮮明になる可能性がある。また、作業機械の作業が夜間に実施される場合においても、可視光撮像装置により撮像される画像が不鮮明になる可能性がある。また、逆光状態の撮像対象を撮像する場合においても、可視光撮像装置により撮像される画像が不鮮明になる可能性がある。
【0005】
本開示は、可視光撮像装置により撮像される画像が不鮮明になる事象が発生しても、作業機械の周辺の状況を作業機械の操作者に提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、作業機械に設けられた可視光撮像装置により撮像された第1対象の画像を示す可視光画像を取得する可視光画像取得部と、前記作業機械に設けられた赤外線撮像装置により撮像された第2対象の画像を示す赤外線画像を取得する赤外線画像取得部と、前記可視光撮像装置から前記第1対象までの距離を示す可視光距離を前記可視光画像に規定された複数の第1区画領域ごとに算出する可視光距離算出部と、前記赤外線撮像装置から前記第2対象までの距離を示す赤外線距離を前記赤外線画像に前記第1区画領域に対応するように規定された複数の第2区画領域ごとに算出する赤外線距離算出部と、対応する前記第1区画領域及び前記第2区画領域ごとに前記可視光距離と前記赤外線距離との差が距離閾値以上か否かを判定する判定部と、前記差が距離閾値以上である前記第2区画領域と前記可視光画像とを合成して合成画像を生成する合成部と、前記合成画像が表示装置に表示されるように前記合成画像を出力する表示出力部と、を備える、表示システムが提供される。
【発明の効果】
【0007】
本開示によれば、可視光撮像装置により撮像される画像が不鮮明になる事象が発生しても、作業機械の周辺の状況を作業機械の操作者に提供することができる。
【図面の簡単な説明】
【0008】
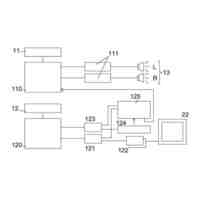
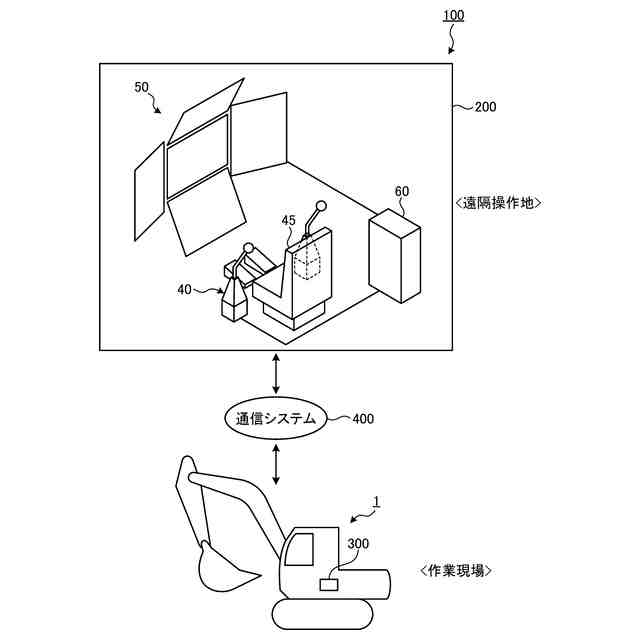
図1は、実施形態に係る作業機械の遠隔操作システムを示す模式図である。
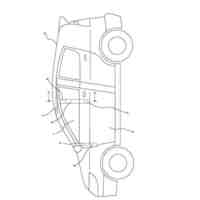
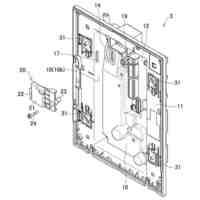
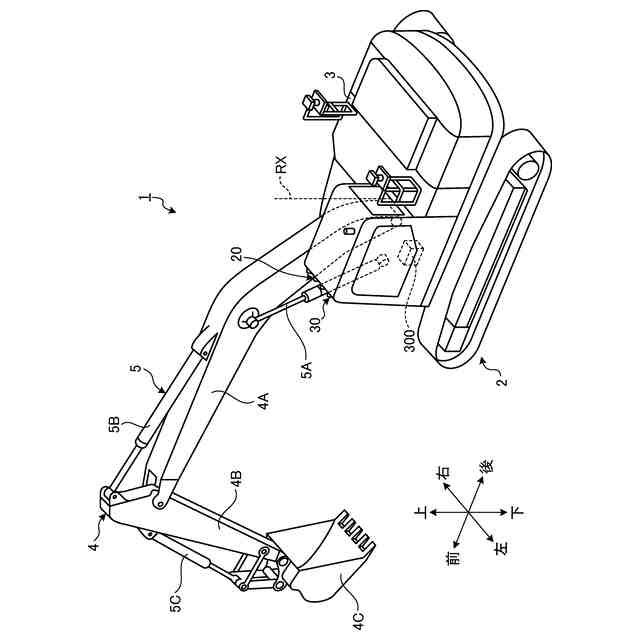
図2は、実施形態に係る作業機械を示す斜視図である。
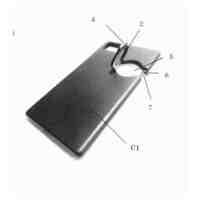
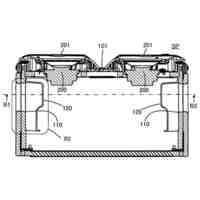
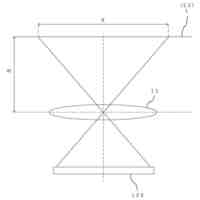
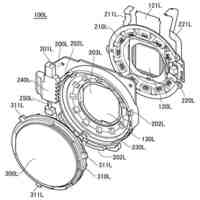
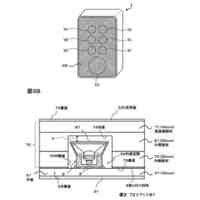
図3は、実施形態に係る可視光撮像装置及び遠赤外線撮像装置を示す斜視図である。
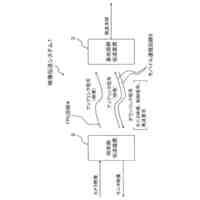
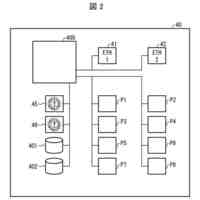
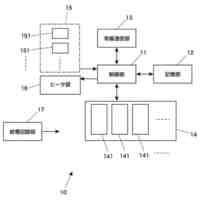
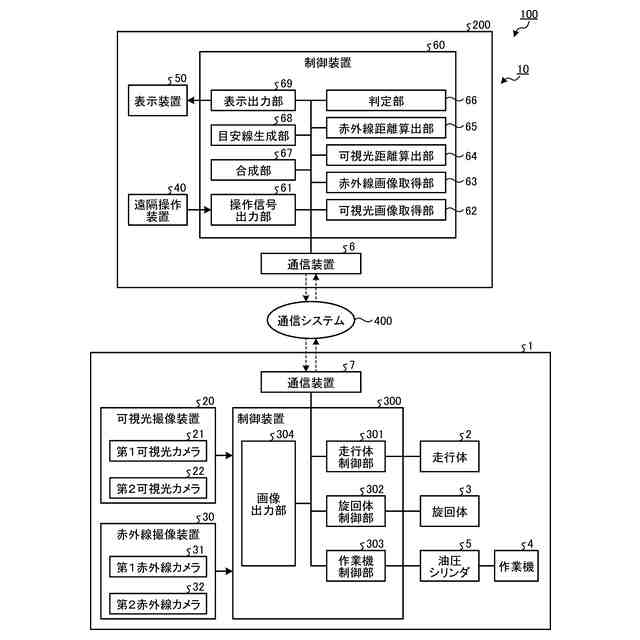
図4は、実施形態に係る作業機械の遠隔操作システムを示す機能ブロック図である。
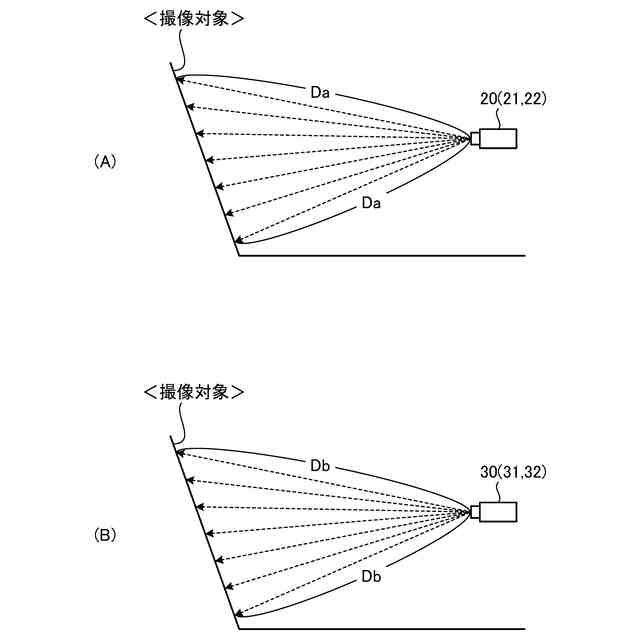
図5は、実施形態に係る可視光撮像装置及び赤外線撮像装置を説明するための模式図である。
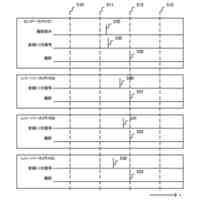
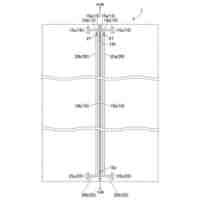
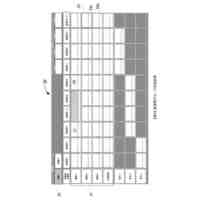
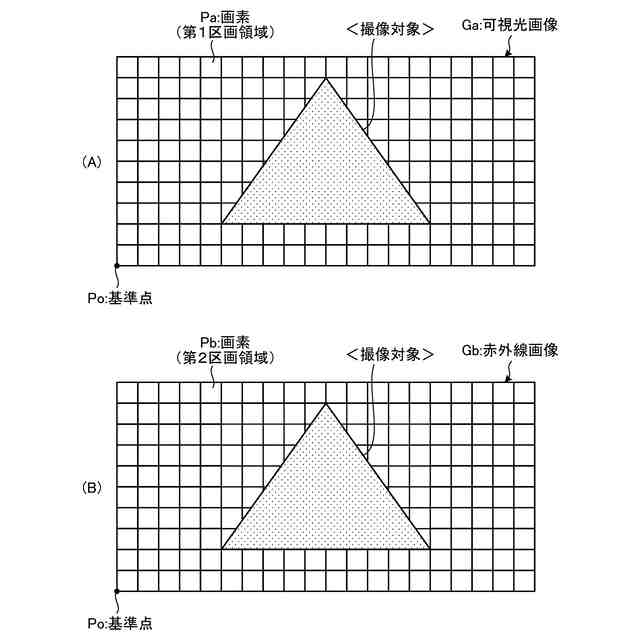
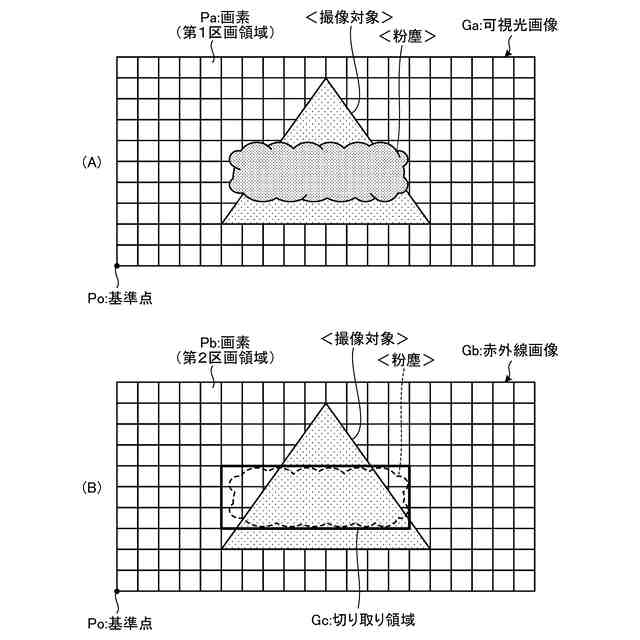
図6は、実施形態に係る可視光画像及び赤外線画像を説明するための模式図である。
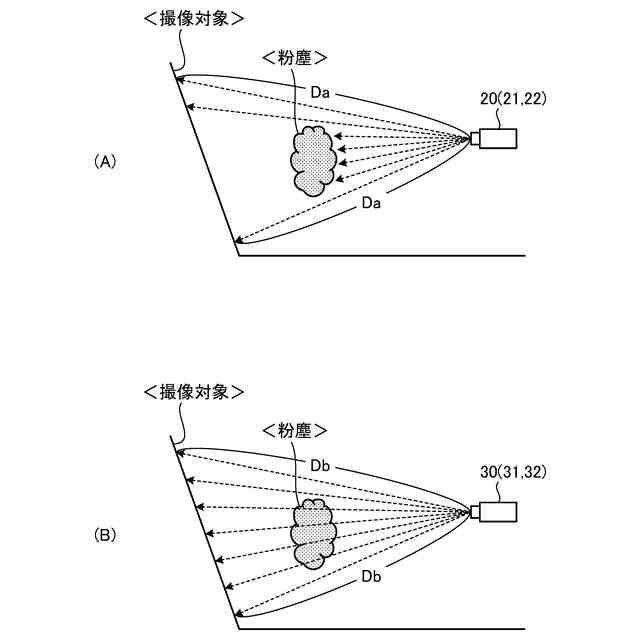
図7は、実施形態に係る可視光撮像装置及び赤外線撮像装置を説明するための模式図である。
図8は、実施形態に係る可視光画像及び赤外線画像を説明するための模式図である。
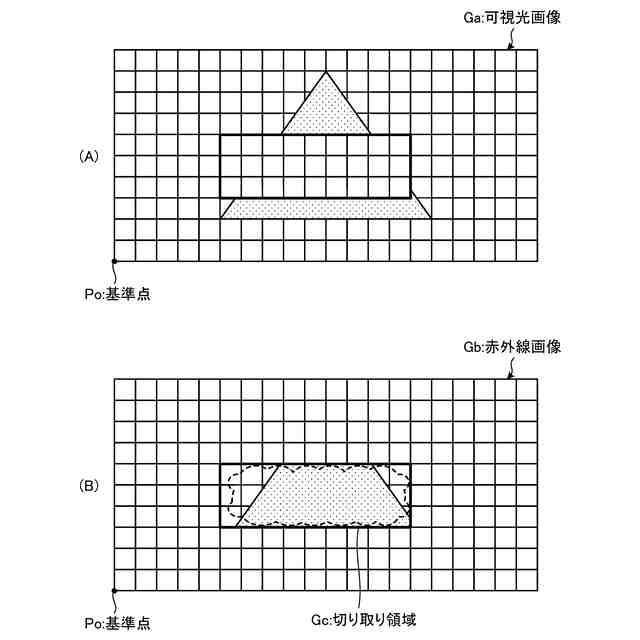
図9は、実施形態に係る合成画像の生成方法を説明するための模式図である。
図10は、実施形態に係る合成画像の生成方法を説明するための模式図である。
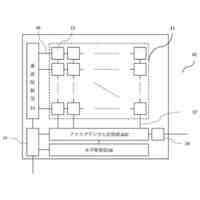
図11は、実施形態に係る表示装置に表示される合成画像及び目安線画像を示す模式図である。
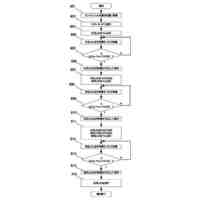
図12は、実施形態に係る表示方法を示すフローチャートである。
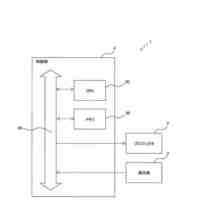
図13は、実施形態に係るコンピュータシステムを示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[遠隔操作システム]
図1は、実施形態に係る作業機械1の遠隔操作システム100を示す模式図である。遠隔操作システム100は、作業現場に存在する作業機械1を遠隔操作する。遠隔操作システム100の少なくとも一部は、遠隔操作地の遠隔操作室200に配置される。遠隔操作システム100は、遠隔操作装置40と、表示装置50と、制御装置60とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
音響装置
1か月前
個人
携帯端末保持具
1か月前
日本無線株式会社
音声通信方式
1か月前
日本精機株式会社
投影システム
1か月前
キヤノン株式会社
通信装置
1か月前
キヤノン株式会社
撮像装置
9日前
日本精機株式会社
車両用表示装置
1か月前
ヤマハ株式会社
音響出力装置
2か月前
ヤマハ株式会社
音響出力装置
2か月前
キヤノン電子株式会社
画像読取装置
1か月前
個人
補聴器のイヤピース耳穴挿入具
1か月前
電気興業株式会社
無線中継器
16日前
ヤマハ株式会社
信号処理装置
9日前
キヤノン電子株式会社
画像読取装置
1か月前
日本放送協会
映像伝送システム
1か月前
キヤノン株式会社
画像処理装置
1か月前
株式会社ヴィーネックス
カメラ
1か月前
キヤノン株式会社
通信システム
24日前
キヤノン株式会社
撮影システム
1か月前
株式会社シグマ
撮像素子及び撮像装置
1か月前
キヤノン株式会社
画像処理装置
1か月前
キヤノン株式会社
画像読取装置
2か月前
キヤノン株式会社
画像表示装置
29日前
オムロン株式会社
スレーブ装置
2か月前
リオン株式会社
電気機械変換器
1か月前
キヤノン株式会社
映像表示装置
2か月前
株式会社クーネル
音響装置
1か月前
エルメック株式会社
信号伝送回路
26日前
シャープ株式会社
電子機器
1か月前
シャープ株式会社
表示装置
1か月前
キヤノン電子株式会社
画像読取システム
25日前
株式会社国際電気
無線通信システム
1か月前
株式会社バッファロー
無線通信装置
1か月前
個人
外部ヘッダ変換通信装置および通信網
9日前
アイホン株式会社
インターホン機器
2か月前
株式会社ニコン
カメラボディ
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ