TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097406
公報種別
公開特許公報(A)
公開日
2025-07-01
出願番号
2023213580
出願日
2023-12-19
発明の名称
作業車両の管理システム
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20250624BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場間移動を円滑に実行できる作業車両の管理システムを提供すること。
【解決手段】実施形態の一態様に係る作業車両の管理システムは、測位装置と、車両検出センサと、制御装置と、を備える。測位装置は、作業車両の位置を測位する。車両検出センサは、他の作業車両の位置および進行方向を検出する。制御装置は、圃場データと、農道データと、を有する。制御装置は、圃場データおよび農道データを用いて、他の作業車両の位置および進行方向の変化から他の作業車両における作業の進捗状況を算出して、他の作業車両の移動ルートおよび移動時刻を予測し、作業車両の移動ルートおよび移動時刻と比較して、他の作業車両とすれ違いが発生する可能性が所定値以上である場合、すれ違いが発生する可能性がある旨を報知する。
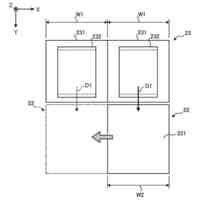
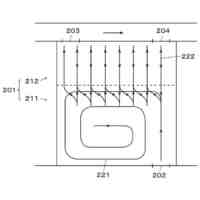
【選択図】図5
特許請求の範囲
【請求項1】
作業車両の位置を測位する測位装置と、
他の作業車両の位置および進行方向を検出する車両検出センサと、
前記作業車両が作業する圃場および前記他の作業車両が作業する圃場を含む圃場データと、前記作業車両が移動する農道および前記他の作業車両が移動する農道を含む農道データと、を有する制御装置と、を備え、
前記制御装置は、前記圃場データおよび前記農道データを用いて、前記他の作業車両の位置および進行方向の変化から前記他の作業車両における作業の進捗状況を算出して、前記他の作業車両の移動ルートおよび移動時刻を予測し、前記作業車両の移動ルートおよび移動時刻と比較して、前記他の作業車両とすれ違いが発生する可能性が所定値以上である場合、前記すれ違いが発生する可能性がある旨を報知する作業車両の管理システム。
続きを表示(約 270 文字)
【請求項2】
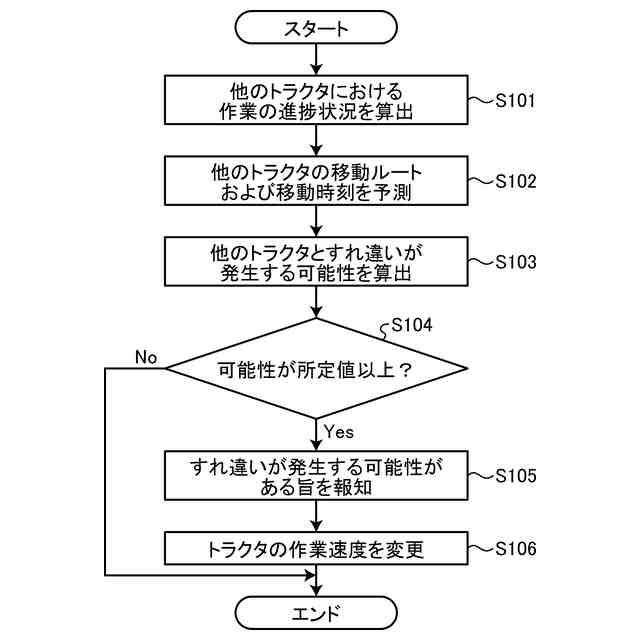
前記制御装置は、前記他の作業車両とすれ違いが発生する可能性が前記所定値以上となった場合、前記作業車両の作業速度を変更して前記他の作業車両とすれ違いが発生する可能性を低下させる請求項1に記載の作業車両の管理システム。
【請求項3】
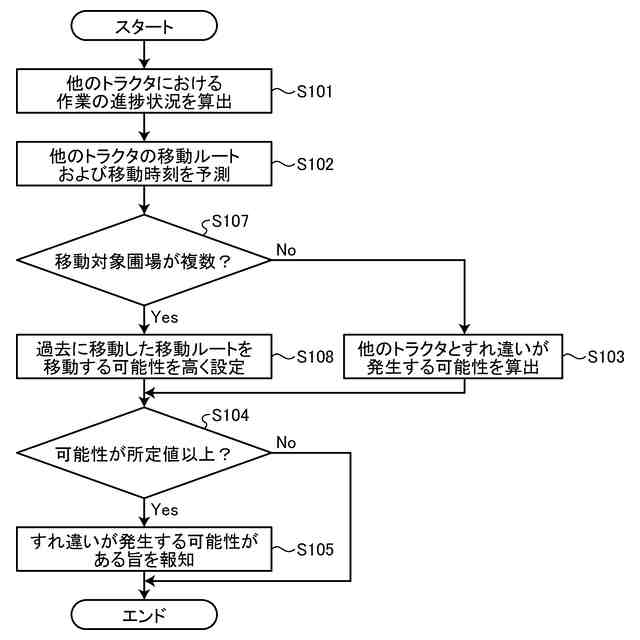
前記制御装置は、前記他の作業車両における過去の移動ルートを記憶し、前記他の作業車両の移動対象圃場が複数ある場合、前記他の作業車両が過去に移動した移動ルートを移動する可能性を、他の移動ルートを移動する可能性よりも高く設定する請求項1または請求項2に記載の作業車両の管理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両の管理システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、作業対象の圃場間を自動走行する複数の作業車両を管理する作業車両の管理システムにおいて、圃場間移動時に作業車両同士のすれ違いが発生しないように当該作業車両の走行を調整する作業車両の管理システムが公知である(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-10873号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圃場間移動時に作業車両が走行する農道は幅が狭い場合があり、すれ違いが発生すると移動が停滞したり、慎重な操作が必要となったりする。そのため、すれ違いの発生は、自動運転を継続させることが困難になるなど、効率を低下させる原因となっていた。上記の技術ではシステム内で稼働する各作業車両の圃場間の移動ルートを取得して当該作業車両の走行を調整していたが、システム外の近隣の作業車両の情報は取得できないため、なお圃場間移動時にすれ違いが発生する場合があった。
【0005】
本発明は、上記に鑑みてなされたものであって、圃場間移動を円滑に実行できる作業車両の管理システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
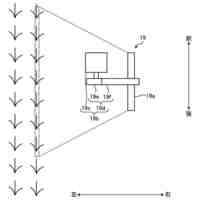
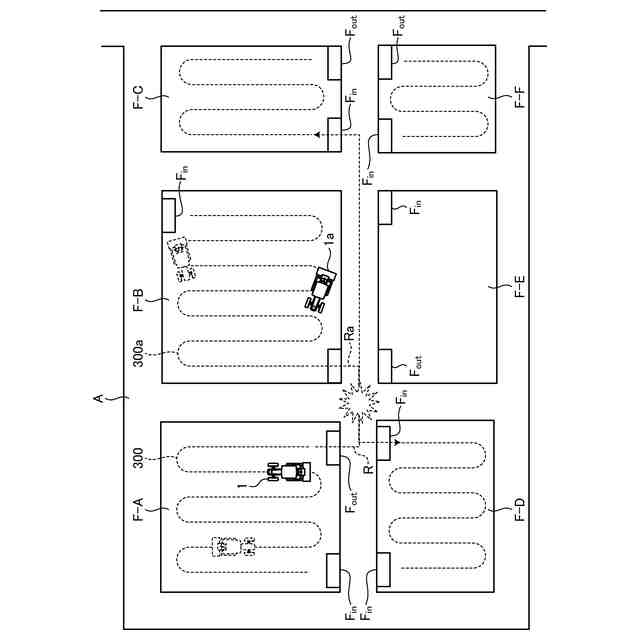
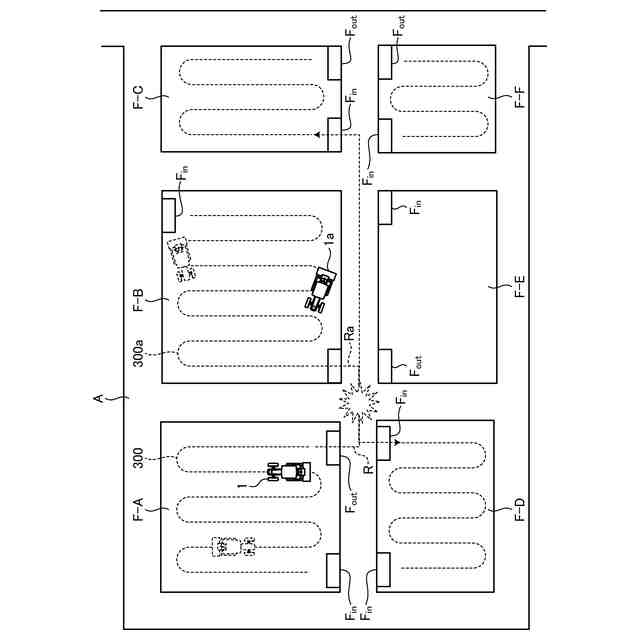
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両(1)の管理システム(100)は、作業車両(1)の位置を測位する測位装置と、他の作業車両(1a)の位置および進行方向を検出する車両検出センサ(124)と、前記作業車両(1)が作業する圃場(F)および前記他の作業車両(1a)が作業する圃場(F)を含む圃場データと、前記作業車両(1)が移動する農道(A)および前記他の作業車両(1a)が移動する農道(A)を含む農道データと、を有する制御装置(160)と、を備え、前記制御装置(160)は、前記圃場データおよび前記農道データを用いて、前記他の作業車両(1a)の位置および進行方向の変化から前記他の作業車両(1a)における作業の進捗状況を算出して、前記他の作業車両(1a)の移動ルート(Ra)および移動時刻を予測し、前記作業車両(1)の移動ルート(R)および移動時刻と比較して、前記他の作業車両(1a)とすれ違いが発生する可能性が所定値以上である場合、前記すれ違いが発生する可能性がある旨を報知する。
【発明の効果】
【0007】
実施形態に係る作業車両の管理システムによれば、圃場間移動を円滑に実行できる。
【図面の簡単な説明】
【0008】
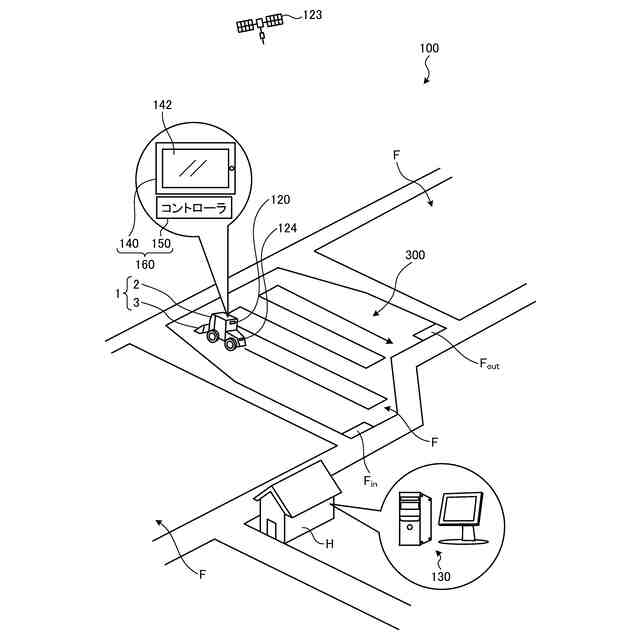
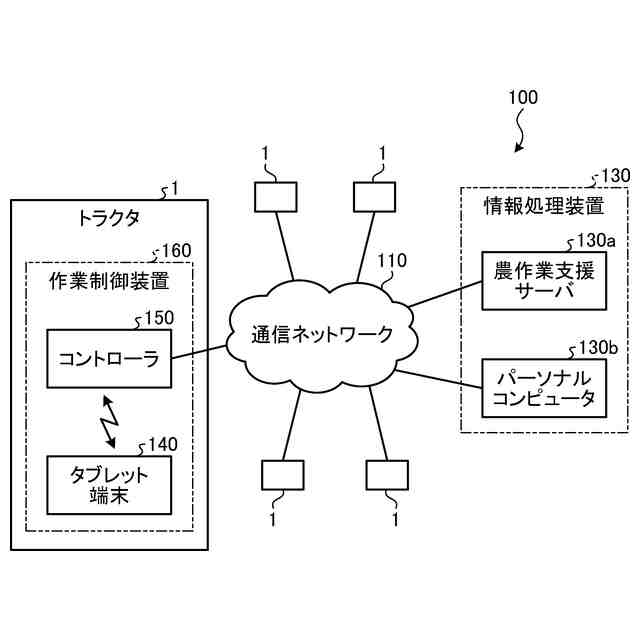
図1は、実施形態に係る作業車両の管理システムの概要を示す説明図である。
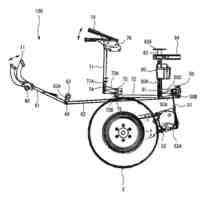
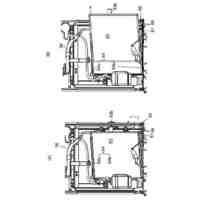
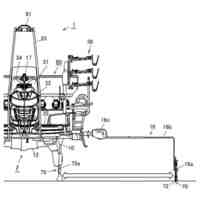
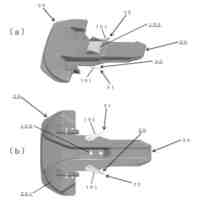
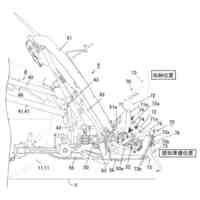
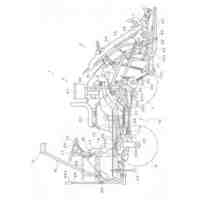
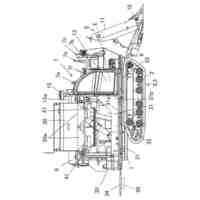
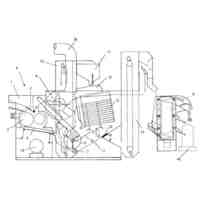
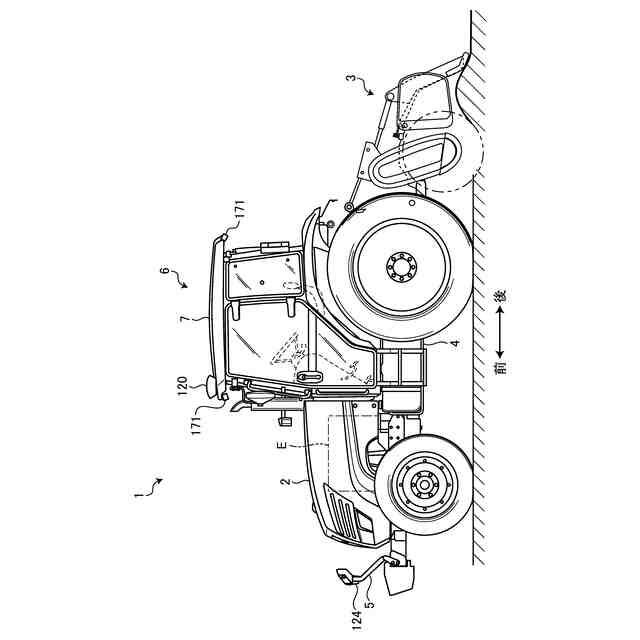
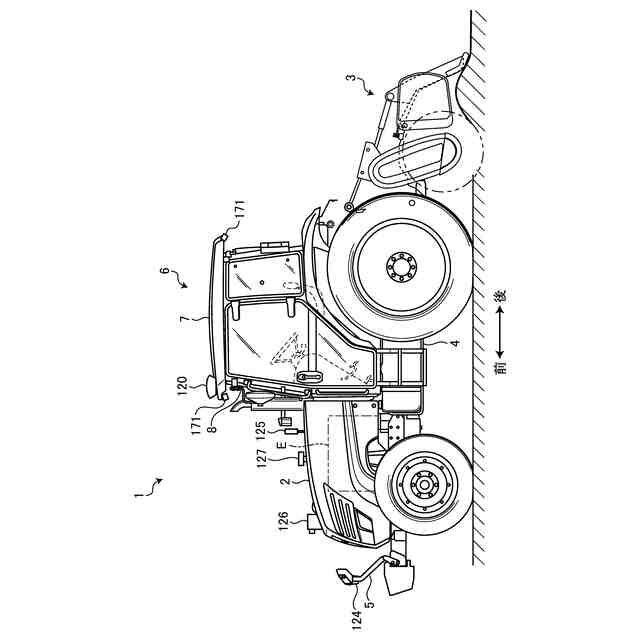
図2は、実施形態に係る作業車両の側面図である。
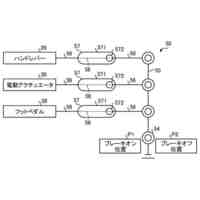
図3は、実施形態に係る作業車両の管理システムの機能を示すブロック図である。
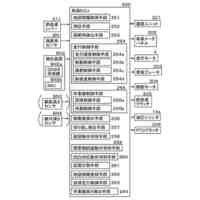
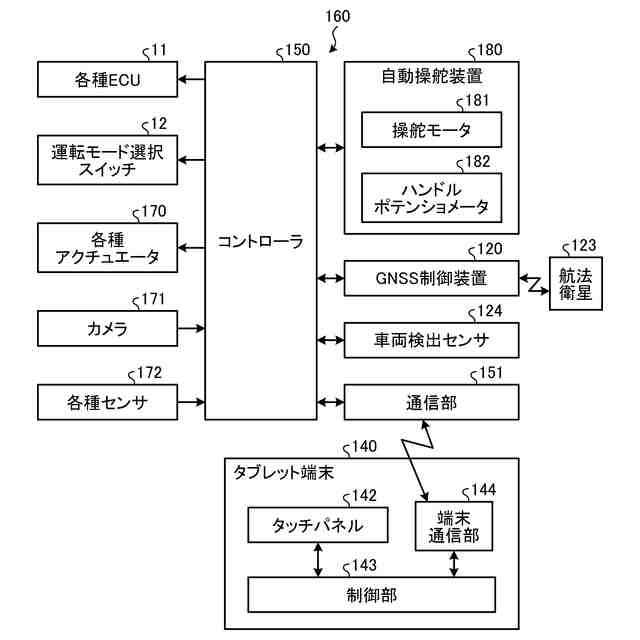
図4は、実施形態に係る制御装置の機能を示すブロック図である。
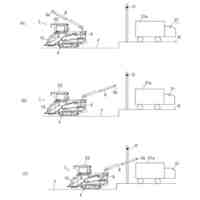
図5は、トラクタの圃場間移動時の処理内容を示す図である。
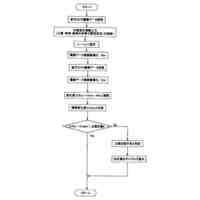
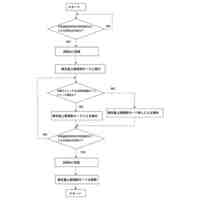
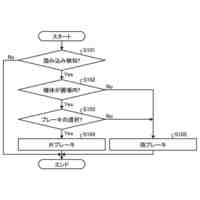
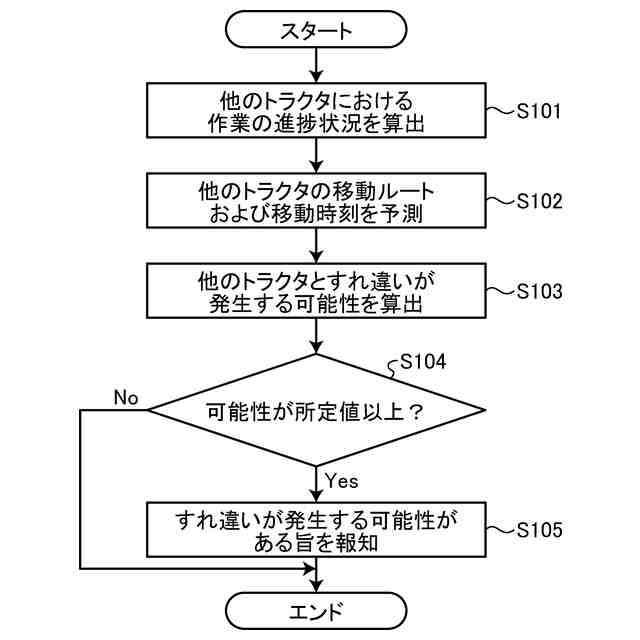
図6は、コントローラが実行する圃場間移動処理の処理手順を示すフローチャートである。
図7は、コントローラが実行する圃場間移動処理の処理手順を示すフローチャートである。
図8は、コントローラが実行する圃場間移動処理の処理手順を示すフローチャートである。
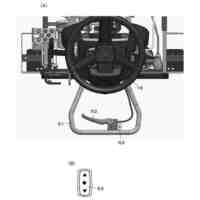
図9は、実施形態に係る作業車両の側面図である。
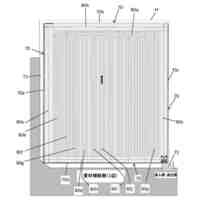
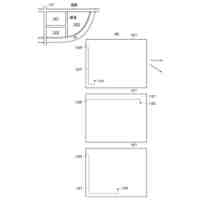
図10は、情報板の正面図である。
【発明を実施するための形態】
【0009】
以下に、本発明の実施形態に係る作業車両の管理システムについて、図面を参照しながら具体的に説明する。なお、下記の実施形態における構成要素には、当業者が置換可能なもの、あるいは実質的に同一のもの、いわゆる均等の範囲のものが含まれる。さらに、本発明は、上記実施形態に限定されるものではなく、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【0010】
まず、図1~図4を参照して作業車両の管理システム100の全体構成について説明する。図1は、実施形態に係る作業車両の管理システム100の概要を示す説明図である。図2は、実施形態に係る作業車両の側面図である。図3は、実施形態に係る作業車両の管理システム100の機能を示すブロック図である。図4は、制御装置160の機能を示すブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
22日前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
苗移植機
28日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
調製設備
29日前
井関農機株式会社
精米設備
24日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
農作業機
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
収穫作業機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
籾摺選別機
29日前
井関農機株式会社
収穫作業機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ