TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025092412
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2024176096
出願日
2024-10-07
発明の名称
EtherCATに基づくケーブル冗長および分散クロック同期の方法並びにそのマスタ機器
出願人
台達電子工業股ふん有限公司
,
DELTA ELECTRONICS, INC.
代理人
個人
主分類
H04L
12/42 20060101AFI20250612BHJP(電気通信技術)
要約
【課題】本発明は、EtherCAT(登録商標)に基づくケーブル冗長及び分散クロック同期の方法並びにそのマスタ機器を提供する。
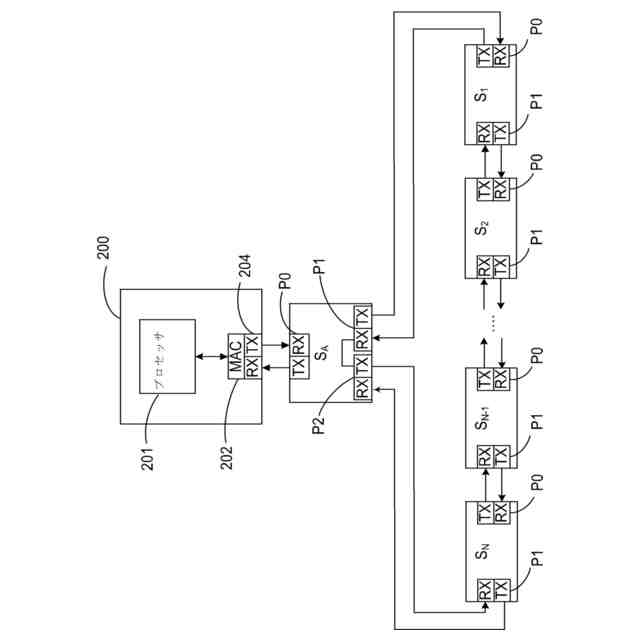
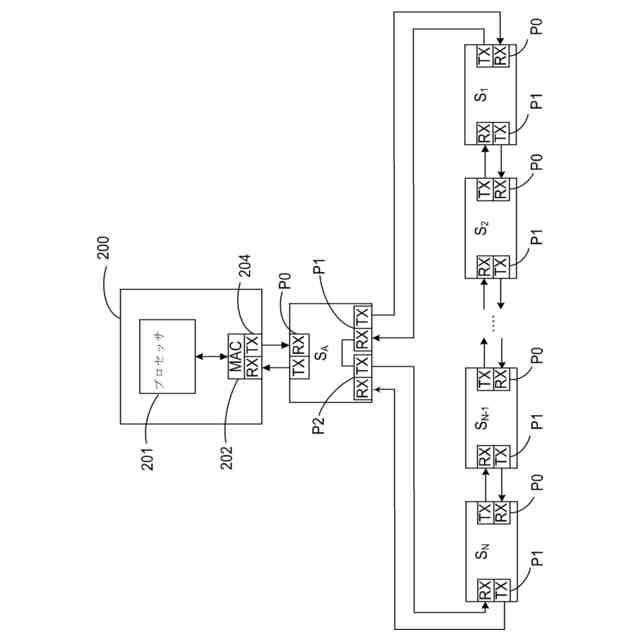
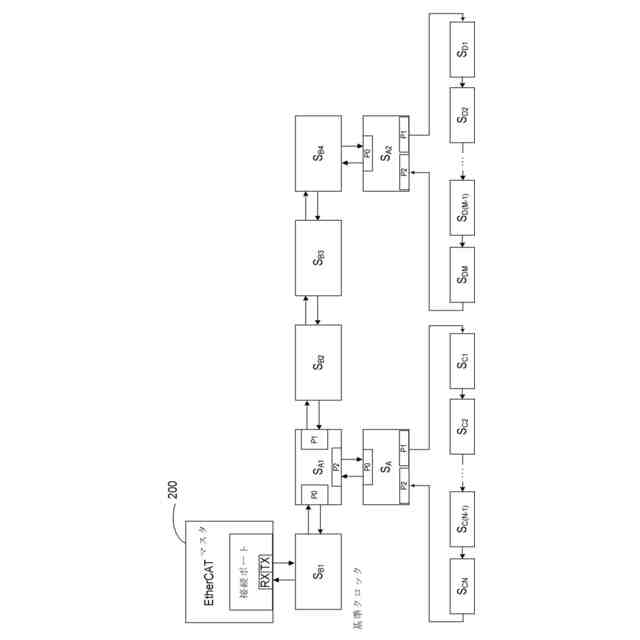
【解決手段】マスタ機器200は、1つのブランチ機器S
A
を介して直列に接続された複数のスレーブ機器S
1
~S
N
と接続し、且つ、ブランチ機器と複数のスレーブ機器は1つの閉ループを形成する。初期化段階では、マスタ機器は、EtherCAT分散クロック同期プロセスを実行する前に、ブランチ機器と複数のスレーブ機器の最後のスレーブ機器との間の接続状態を切断し、完了後、ブランチ機器と最後のスレーブ機器との間の接続ポートを開く。閉ループに切断が発生したとき、ブランチ機器は、冗長経路としてパケットを転送することができ、ケーブル冗長の効果を達成する。切断を解消した後、分散クロック同期プロセスを再度実行することなく、初期化段階に計算された各スレーブ機器のシステム時間遅延は引き続き適用される。
【選択図】図3A
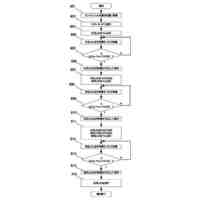
特許請求の範囲
【請求項1】
ブランチ機器を介して、直列に接続されたN個のスレーブ機器に接続されるマスタ機器に使用される、EtherCATに基づくケーブル冗長および分散クロック同期の方法であって、
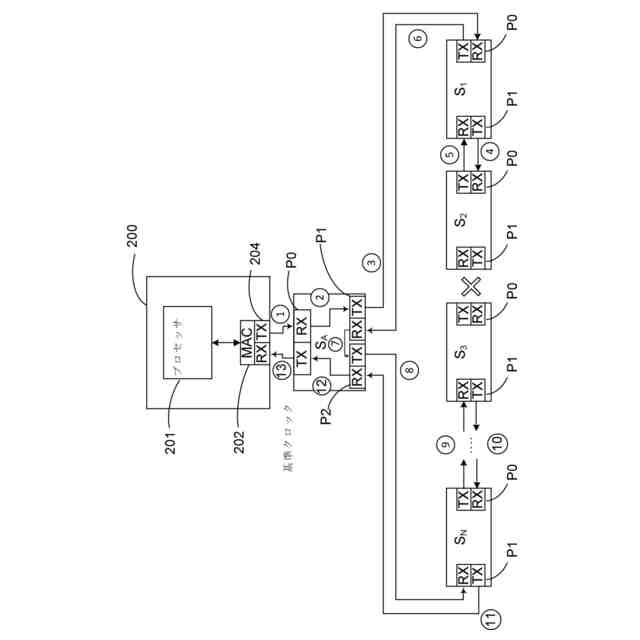
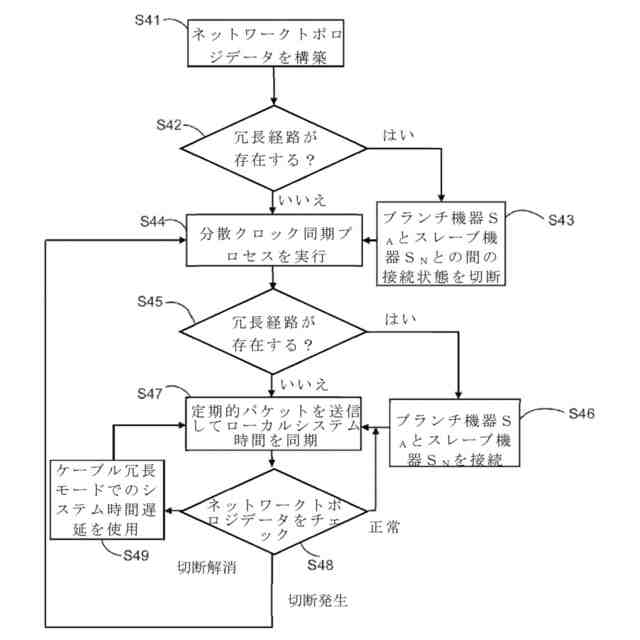
問い合わせパケットを送信して、前記ブランチ機器および前記N個のスレーブ機器に複数の接続ポートのステータス情報を報告するように指示し、前記複数の接続ポートのステータス情報に基づいて、ネットワークトポロジデータを構築するステップ(1)と、
前記ネットワークトポロジデータに従って、冗長経路が存在すると判断された場合はステップ(3)に進み、そうでない場合はステップ(4)に進むステップ(2)と、
第1コマンドパケットを送信して、前記ブランチ機器と前記N個のスレーブ機器のN番目のスレーブ機器との間の接続状態を切断するように指示するステップ(3)と、
分散クロック同期プロセスを実行して、冗長モードでの複数のシステム時間遅延を計算するステップ(4)と、
第2コマンドパケットを送信して、前記ブランチ機器と前記N番目のスレーブ機器を接続するように指示するステップ(5)と、を含み、
Nは1より大きい自然数である、
方法。
続きを表示(約 1,800 文字)
【請求項2】
前記N個のスレーブ機器のそれぞれは、
上流機器に接続される第1接続ポートと、
下流機器に接続される第2接続ポートと、を含み、
前記ブランチ機器は、
前記マスタ機器に接続される第1接続ポートと、
前記N個のスレーブ機器のうちの1番目のスレーブ機器の前記第1接続ポートに接続される第2接続ポートと、
前記N番目のスレーブ機器の前記第2接続ポートに接続される第3接続ポートと、を含む、
請求項1に記載の方法。
【請求項3】
前記ステップ(2)は、
前記ネットワークトポロジデータが、前記ブランチ機器の前記第3接続ポートが前記N番目のスレーブ機器の前記第2接続ポートに接続することを示す場合、前記冗長経路が存在すると判断されるステップを含む、
請求項2に記載の方法。
【請求項4】
前記ステップ(3)は、
前記第1コマンドパケットを前記N番目のスレーブ機器に送信して、前記N番目のスレーブ機器の前記第2接続ポートを閉じるように指示するステップと、
前記第1コマンドパケットを前記ブランチ機器に送信して、前記ブランチ機器の前記第3接続ポートを閉じるように指示するステップと、を含む、
請求項2に記載の方法。
【請求項5】
前記ステップ(5)は、
前記第2コマンドパケットを前記N番目のスレーブ機器に送信して、前記N番目のスレーブ機器の前記第2接続ポートを開くように指示するステップと、
前記第2コマンドパケットを前記ブランチ機器に送信して、前記ブランチ機器の前記第3接続ポートを開くように指示するステップと、を含む、
請求項2に記載の方法。
【請求項6】
前記ステップ(4)の後に、前記ネットワークトポロジデータに従って、前記冗長経路が存在すると判断された場合はステップ(5)に進み、そうでない場合はステップ(7)に進むステップ(6)と、
定期的パケットを前記ブランチ機器及び前記N個のスレーブ機器に送信して、前記ブランチ機器及び前記N個のスレーブ機器の複数のローカルシステム時間を同期させるステップ(7)と、をさらに含む、
請求項1に記載の方法。
【請求項7】
前記ステップ(7)の後に、
前記ネットワークトポロジデータが正常を示す場合、前記ステップ(7)を再度実行するステップ(8)と、
前記ネットワークトポロジデータが切断の発生を示す場合、前記ステップ(4)を再度実行して、切断モードでの複数のシステム時間遅延を計算するステップ(9)と、
前記ネットワークトポロジデータが切断の解消を示す場合、前記冗長モードでの前記複数のシステム時間遅延を使用して、前記ステップ(7)を再度実行するステップ(10)と、をさらに含む、
請求項6に記載の方法。
【請求項8】
前記ステップ(9)の後に、前記ステップ(4)を再度実行する場合、前記ブランチ機器は、切断が発生したときの冗長経路として、データパケットを前記N個のスレーブ機器のうちの1番目のスレーブ機器から前記N番目のスレーブ機器に転送するように構成される、
請求項7に記載の方法。
【請求項9】
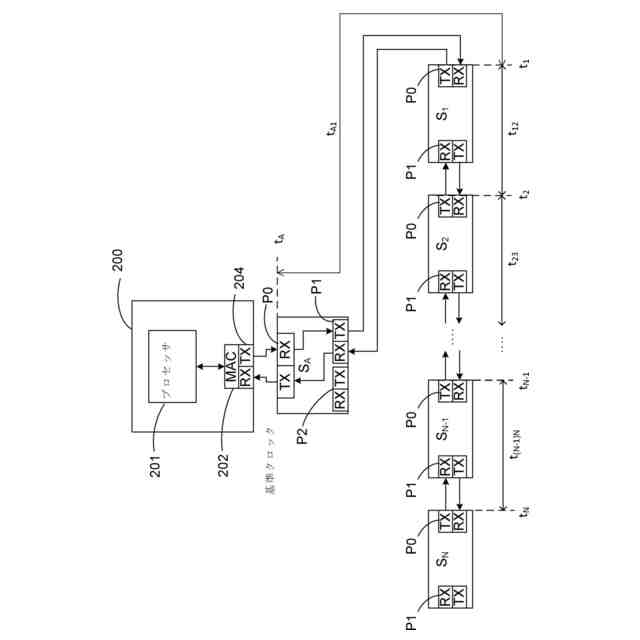
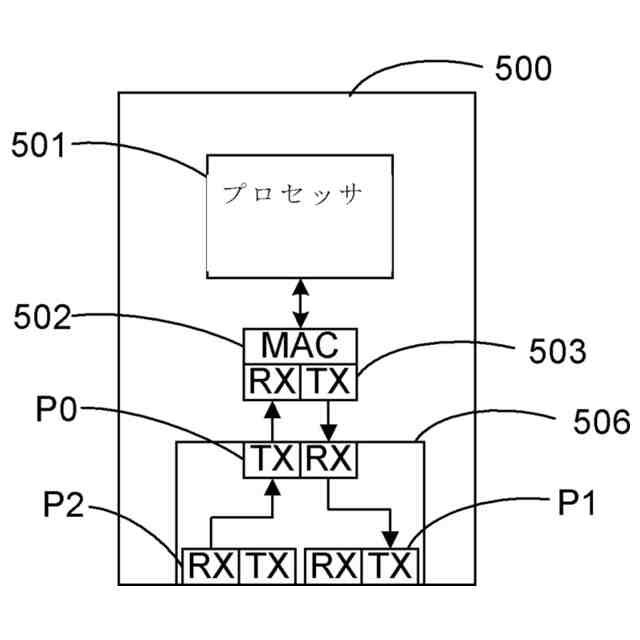
EtherCATに適用されるマスタ機器であって、
ブランチ機器に接続するように構成される接続ポートであって、直列に接続されたN個のスレーブ機器が前記ブランチ機器を介して前記マスタ機器に接続される接続ポートと、
前記接続ポートに接続されるイーサネットMACデバイス(Ethernet media access control device)と、
前記イーサネットMACデバイスに接続され、請求項1に記載のEtherCATに基づくケーブル冗長および分散クロック同期の方法を実行するように構成されるプロセッサと、を含む、
EtherCATに適用される、マスタ機器。
【請求項10】
前記マスタ機器と前記ブランチ機器との間に少なくとも一つのスレーブ機器が直列に接続される、
請求項9に記載のマスタ機器。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、イーサネット自動制御技術(EtherCAT)の制御方法およびそのマスタ機器に関し、特に、ケーブル冗長と分散クロックメカニズムを同時にサポートするEtherCAT制御方法およびそのマスタ機器に関する。
続きを表示(約 5,100 文字)
【背景技術】
【0002】
イーサネット自動制御技術(Ethernet for Control Automation Technology、EtherCAT)は、イーサネットをベースとするフィールドバス(fieldbus)である。イーサネット(Ethernet)の全二重特性は、EtherCATトランスポートプロトコルの基礎を構成し、線形、ツリー型、スター型、およびリング型などの構造を含む多様なネットワークトポロジ構造を支援するために使用され、それらの構造から生じる組合せはすべてEtherCATのトポロジ構造として利用可能である。EtherCATは、上記の特性を有することから、自動化及び工業製造分野で幅広く使用されている。
【0003】
EtherCAT技術は、ドイツのBeckhoff社により開発され、2003年に販売され、2005年2月にIEC規格-IEC/PAS62407として正式になり、国際フィールドバス技術の新世代標準IEC61158に統合され、国際標準化機構(ISO)も、EtherCATをISO15745規格に組み込んでおり、現在、EtherCAT技術組織(EtherCAT Technology Group、ETG)が該技術のサポートと普及を推進する。
【0004】
EtherCATは、マスタスレーブアーキテクチャを採用し、マスタ機器(master device)とスレーブ機器(slave device)との間で、EtherCATデータパケット(EtherCAT datagram)を介してデータまたはコマンドを伝送し、EtherCATのパケット構造は、パケットヘッダ(datagram header)、データ(data)、および作動カウンタ(working counter)を含む。パケットヘッダの設定により、EtherCATは、データパケット(またはコマンドパケットと呼ばれる)を特定のスレーブ機器に送信し、または「ブロードキャスト読み取り(broadcast read)」および「ブロードキャスト書き込み(broadcast write)」を含むブロードキャストデータパケットをすべてのスレーブ機器に送信し得る。スレーブ機器は、受信されたデータパケットがこのスレーブ機器によって処理されるべきパケットであることを識別し、且つ、該データパケット内のデータの処理(読み取りまたは/および書き込み)に成功したときに、該作動カウンタの値が累加される。スレーブ機器は、データパケット内の作動カウント値から、何台のスレーブ機器が該データパケットを正常に処理できたかを知ることができる。Ethernetは、EtherCATデータのキャリアであり、一度に1つまたは複数のEtherCATをEthernet (IEEE 802.3)規格のEthernetデータフレーム(frame)に入れて伝送できる。以降の説明の便宜上、「データパケットの伝送」とは、EtherCATがEthernetデータパケットを搬送および伝送する動作を意味し、特定の機能を実現できるデータパケット内の詳細な構造は、EtherCATの仕様に準拠するため、ここでは説明しない。
【0005】
EtherCATの通信方式を簡単に説明すると、マスタ機器はデータパケットの能動的送信を可能にする唯一のノードであり、該データパケットはネットワークトポロジ内のすべてのスレーブ機器を経由し、スレーブ機器は、データパケットが該スレーブ機器に到達したときに、所望のデータを読み取り、伝送すべきデータを該データパケット内に書き込み、次いで、該データパケットを次のスレーブ機器に伝送し、最後のスレーブ機器に伝送できる次のスレーブ機器がない場合には、Ethernet全二重特性を通じて、該データパケットが元のパスに沿ってマスタ機器に戻される。EtherCATには様々なネットワークトポロジ形態があるが、上記の伝送経路全体は閉ループに等価し、該データパケットはマスタ機器から伝送され、一周してマスタ機器に戻る。
【0006】
EtherCAT動作の初期段階では、マスタ機器は、各スレーブ機器の基本データと、各スレーブとの間の相互接続状態を把握するために、全体のネットワークトポロジデータを構築する必要がある。ネットワークトポロジデータの構築プロセスを簡単に説明すると、マスタ機器は、すべてのスレーブ機器に問い合わせ(Query)パケットをブロードキャスト送信し、各スレーブ機器は、問い合わせパケットを受信し且つ問い合わせパケットがマスタ機器に戻った後、問い合わせパケット中の作動カウンタ値から現在のネットワークトポロジにおけるスレーブ機器の数を知る。そして、マスタ機器は、各スレーブ機器に関連データパケットを順次送信して各スレーブ機器を初期化し、各スレーブ機器に該スレーブ機器の関連パラメータデータを報告させる。マスタ機器は、各スレーブ機器のパラメータ情報に基づいて、各スレーブ機器がどの接続ポートを有しているか、各スレーブ機器間がどの接続ポートを介して次のスレーブ機器に接続されているか等の情報を含む、EhterCATネットワークトポロジ全体の接続アーキテクチャを知る。EtherCATが通常動作段階に入ると、例えば、受信した作動カウント値が予想値と異なることを発見するなど、マスタ機器がネットワークトポロジに変化があることを検出した場合、マスタ機器は、最新のネットワークトポロジデータを得るために、上述したプロセスを再度実行することができる。
【0007】
EtherCATネットワークでは、同期化操作において各スレーブ機器の正確な同期が非常に重要である。EtherCATネットワーク内の各スレーブ機器のローカルクロック(local clock)は異なるため、各スレーブ機器は、ローカルクロックを補正および同期した後、ローカルシステムクロック(local system clock)を生成し、EtherCATは、IEEE1588規格の分散クロック(distributed clock)メカニズムにより、各スレーブ機器のローカルシステムクロックを一致させて、正確な同期効果を達成する。説明の便宜上、このメカニズムの動作手順を分散クロック同期プロセスと称し、簡単に説明すると以下のとおりである。ネットワークトポロジにおけるスレーブ機器を基準クロック(reference clock)として選定し、マスタ機器が特定の「ブロードキャスト書き込み」データパケットを各スレーブ機器に送信し、スレーブ機器が該データパケットを受信すると、当時の該スレーブ機器のローカルクロック値をタイムスタンプ(timestamp)として該データパケットに書き込み、該データパケットが最後のスレーブ機器に送信されてから返送され、各スレーブ機器を再度通過すると、各スレーブ機器は、該データパケットにローカルクロック値をタイムスタンプとして再び書き込む。マスタ機器は、受信したこれらのタイムスタンプデータに基づいて、システム時間オフセット(system time offset)、各スレーブ機器間のシステム時間遅延(system time delay)と呼ばれる、各スレーブ機器のローカルクロックと基準クロックとの差を計算することができ、マスタ機器は、これらのパラメータを、データパケットを介して各スレーブ機器に伝送し、各スレーブ機器は、ローカルシステムクロックを計算または同期する際に使用するために格納し、例えば、システム時間遅延は、各機器のEtherCATスレーブコントローラ(EtherCAT Slave Controller、ESC)の一時記憶装置0x928に格納される。EtherCATが通常動作段階に入った後、マスタ機器はすべてのスレーブ機器に同期パケットを定期的に送信し、すべてのスレーブ機器のローカルシステムクロックを同期する。同期パケットは、現在の基準クロック値を搬送し、各スレーブ機器は、各スレーブ機器のローカルシステムクロックが常に100ns以下の誤差範囲内に維持されるように、最新に受信した基準クロック値、受信時の自身当時のローカルクロック値、システム時間オフセット、システム時間遅延に基づいて、スレーブ機器自身のローカルシステムクロックを同期させる。
【0008】
EtherCATの別の特徴は、ケーブル冗長(cable redundancy)メカニズムを含むことであり、その目的は、機器切断が発生した場合、ネットワーク上の正常なスレーブ機器が冗長経路を通じてマスタ機器に接続されて、システムの生存度を向上させることである。ケーブル冗長メカニズムはネットワークトポロジと組み合わせて実装される必要がある。EtherCATネットワークトポロジが線形である場合、中間の1つのスレーブ機器に切断(例えば、IPアドレスエラー、またはケーブル破損、接続ポートの接触不良による接続能力の喪失)が発生すると、下流のスレーブ機器はマスタ機器に接続できないため、システムで使用できない。ネットワークトポロジが閉ループである場合、中間の1つのスレーブ機器に切断が発生すると、ネットワークトポロジは2つの線形構造になり、マスタ機器がネットワークトポロジデータを更新した後、接続能力を備えたスレーブ機器は、そのうちの1つの線形構造を介してマスタ機器に接続することができ、システムで使用することができる。ただし、スレーブ機器に障害が発生すると、接続機能があってもシステムで使用できなくなる。
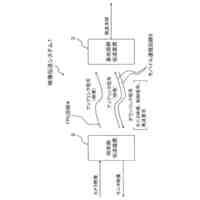
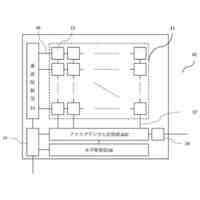
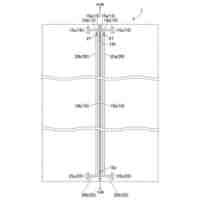
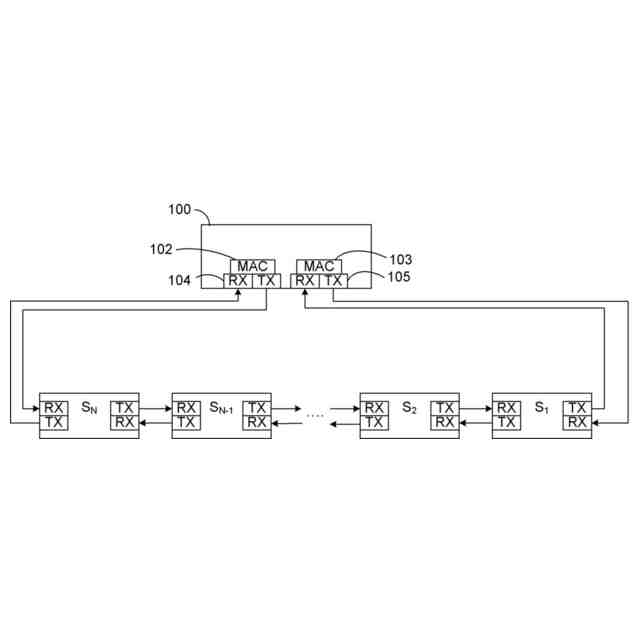
【0009】
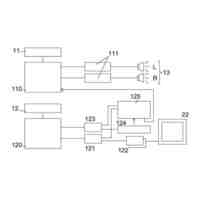
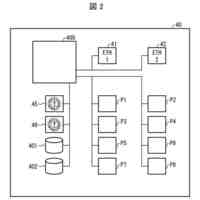
図1は、閉ループを含む従来のEtherCATシステムである。従来のEtherCATシステムは、マスタ機器100と複数のスレーブ機器S
1
~S
N
を含む。マスタ機器100は、それぞれEthernet接続ポート104、105に接続されているEthernet MACデバイス102、103を含む2つのイーサネットMACデバイス(Ethernet media access control device)を含む。Ethernet接続ポートには、送信ユニットTX(transmitting unit)と受信ユニットRX(receiving unit)があり、マスタ機器100の2つの送信ユニットTXは、同じ内容のデータパケットを同時に送信し、それぞれをネットワーク接続により伝送し、最後にマスタ機器100の対応する受信ユニットRXで受信した後、マスタ機器100は、2つのEthernet MACデバイス102、103のデータを統合する必要がある。ネットワークが切断される場合、例えば、スレーブ機器S
2
およびS
3
が切断した場合、元の閉ループは、2つの分離した線形構造となり、それぞれマスタ機器100の2つのEthernet接続ポート104、105に接続されるため、各スレーブ機器をマスタ機器100に接続することができるといったケーブル冗長効果を達成することができるが、分散クロックメカニズムは正常に動作できない。ネットワークトポロジ構造とデータパケット伝送経路の変化により、スレーブ機器S
3
~S
N
は、スレーブ機器S
1
の基準クロックデータに基づいてデータパケットを伝送することができなくなる。スレーブ機器S
3
~S
N
が基準クロックと一致しない場合、複数のスレーブ機器でクロック偏差の問題が発生する。したがって、ネットワークに切断が発生した場合、ケーブル冗長メカニズムと分散クロックメカニズムでは、複数のスレーブ機器が同期できないという問題が発生する。
【発明の概要】
【発明が解決しようとする課題】
【0010】
これに鑑みて、本発明は、ケーブル冗長メカニズムと分散クロックメカニズムを同時にサポートすることにより、ネットワークに切断が発生したとき、システムを動作可能な状態に維持することを可能にするEtherCAT制御方法およびそのマスタ機器を提供する。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
携帯端末保持具
1か月前
個人
音響装置
1か月前
日本無線株式会社
音声通信方式
1か月前
日本精機株式会社
投影システム
1か月前
キヤノン株式会社
撮像装置
1日前
日本精機株式会社
車両用表示装置
1か月前
キヤノン株式会社
通信装置
1か月前
ヤマハ株式会社
音響出力装置
1か月前
ヤマハ株式会社
信号処理装置
1日前
キヤノン電子株式会社
画像読取装置
1か月前
ヤマハ株式会社
音響出力装置
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
電気興業株式会社
無線中継器
8日前
個人
補聴器のイヤピース耳穴挿入具
1か月前
キヤノン株式会社
画像表示装置
21日前
リオン株式会社
電気機械変換器
1か月前
日本放送協会
映像伝送システム
1か月前
キヤノン株式会社
撮影システム
1か月前
キヤノン株式会社
画像読取装置
2か月前
キヤノン株式会社
通信システム
16日前
株式会社ヴィーネックス
カメラ
1か月前
キヤノン株式会社
画像処理装置
1か月前
株式会社シグマ
撮像素子及び撮像装置
1か月前
オムロン株式会社
スレーブ装置
2か月前
キヤノン株式会社
画像処理装置
25日前
キヤノン株式会社
映像表示装置
2か月前
シャープ株式会社
電子機器
1か月前
株式会社クーネル
音響装置
24日前
シャープ株式会社
表示装置
29日前
キヤノン電子株式会社
画像読取システム
17日前
エルメック株式会社
信号伝送回路
18日前
株式会社バッファロー
無線通信装置
1か月前
株式会社ニコン
カメラボディ
2か月前
アイホン株式会社
インターホン機器
2か月前
個人
外部ヘッダ変換通信装置および通信網
1日前
株式会社国際電気
無線通信システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ