TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089135
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2023204157
出願日
2023-12-01
発明の名称
電動車両の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20250605BHJP(車両一般)
要約
【課題】MT車両の手動変速操作を疑似的に再現し、手動変速操作と電動車両の運転状態との不一致を回避し、適切に運転操作を行うことが可能な電動車両の制御装置を提供する。
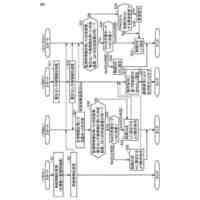
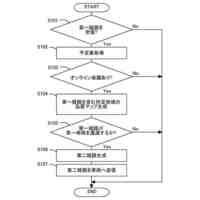
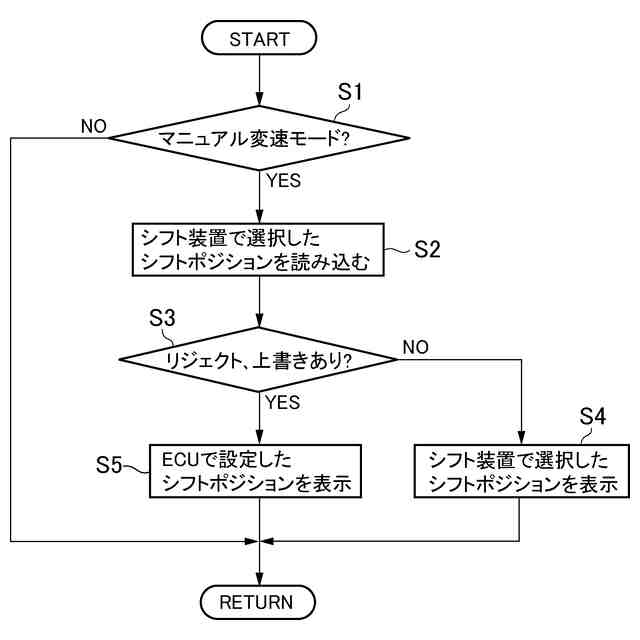
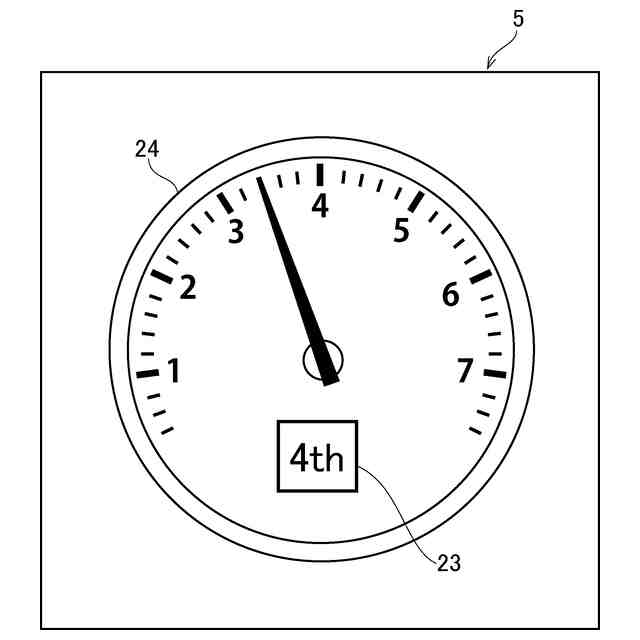
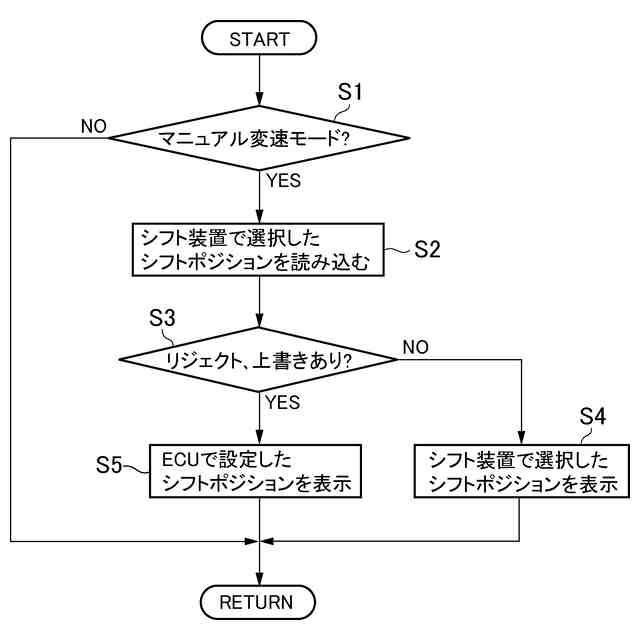
【解決手段】手動操作によって動作するシフト装置で選択したシフトポジションに応じて駆動力を制御することが可能な電動車両の制御装置において、シフト装置は、複数のシフトポジションと第1ホームとをそれぞれ繋いだシフトゲート、および、手動操作の操作力によってシフトゲートに沿って移動するとともに、操作力が解除されることにより第1ホームの位置に復帰するモーメンタリ動作を行う操作レバーを有し、操作レバーが移動した先のシフトポジションを選択するように構成されており、シフト装置から送信される電気信号に基づいて電動車両を制御するとともに、シフト装置で選択されたシフトポジションを表示装置に表示させる(ステップS4)。
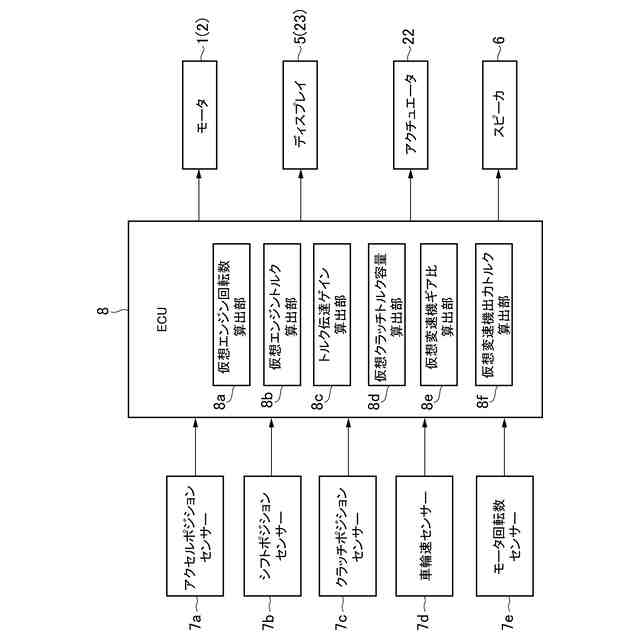
【選択図】図8
特許請求の範囲
【請求項1】
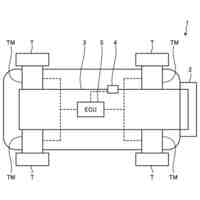
少なくともモータを含む駆動力源と、運転者の手動操作によって動作して複数のシフトポジションのいずれかを選択するシフト装置と、を備え、前記駆動力源の出力トルクを駆動輪に伝達して駆動力を発生するとともに、前記シフト装置で選択された前記シフトポジションに応じて前記出力トルクを制御することにより前記駆動力を制御することが可能な電動車両の制御装置であって、
前記シフト装置は、
複数の前記シフトポジションのいずれにも属さない第1ホームと前記各シフトポジションとをそれぞれ繋いだシフトゲート、および、前記手動操作の操作力によって前記シフトゲートに沿って移動するとともに、前記操作力が解除されることにより前記第1ホームの位置に復帰するモーメンタリ動作を行う操作レバーを有し、
前記操作レバーが移動した先に配置された前記シフトポジションを選択するように構成されており、
所定の情報を表示して前記運転者に告知する表示装置と、前記電動車両を制御するコントローラと、を備え、
前記コントローラは、
前記シフト装置から送信される電気信号に基づいて前記電動車両を制御するとともに、
前記シフト装置で選択された前記シフトポジションを前記表示装置に表示させる
ことを特徴とする電動車両の制御装置。
続きを表示(約 2,800 文字)
【請求項2】
請求項1に記載の電動車両の制御装置であって、
前記コントローラは、
いずれも実際には搭載されていない仮想エンジンおよび仮想変速機を備えていること、前記仮想エンジンが出力する仮想エンジントルクを、前記仮想変速機を介して前記駆動輪に伝達し、前記駆動力を発生させること、ならびに、複数の前記シフトポジションにそれぞれ対応する複数の仮想変速段を前記仮想変速機で選択的に設定すること、を想定し、
前記シフト装置で選択された前記シフトポジションに対応する前記仮想変速段を設定した前記仮想変速機を介して、前記仮想エンジントルクを前記駆動輪に伝達した場合に発生する仮想駆動力を想定した前記駆動力が発生するように、前記出力トルクを制御する
ことを特徴とする電動車両の制御装置。
【請求項3】
請求項2に記載の電動車両の制御装置であって、
前記電動車両の運転状態を決める複数のレンジが設定されていて、要求駆動力に基づいて前記出力トルクを制御することにより前記駆動力を制御して走行するオートマチックモードと、前記手動操作によっていずれかの前記シフトポジションを選択し、選択された前記シフトポジションに対応する前記仮想変速段に応じて前記出力トルクを制御することにより前記駆動力を制御して走行するマニュアル変速モードと、を選択することが可能であり、
前記シフト装置は、
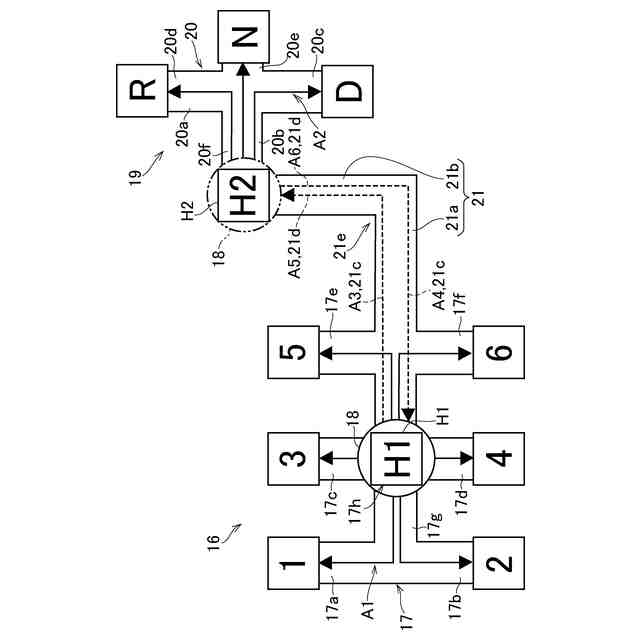
複数の前記レンジのいずれにも属さない第2ホームと前記各レンジとをそれぞれ繋いだレンジゲート、および、前記第1ホームと前記第2ホームとを繋いだ切り替えゲートを更に有し、
前記操作力によって前記操作レバーが前記切り替えゲートに沿って移動するとともに、前記操作レバーが前記第1ホームの位置に移動することにより前記マニュアル変速モードを選択し、前記操作レバーが前記第2ホームの位置に移動することにより前記オートマチックモードを選択し、
前記オートマチックモードで、前記操作力によって前記操作レバーが前記レンジゲートに沿って移動することにより複数の前記レンジのいずれかを選択し、
前記操作レバーが前記レンジゲートに沿って移動する場合に、前記操作レバーは前記モーメンタリ動作を行い、前記操作レバーが前記切り替えゲートに沿って移動する場合に、前記操作レバーは前記操作力が解除された際に前記操作レバーの位置が保持されるオルタネイト動作を行うように構成されている
ことを特徴とする電動車両の制御装置。
【請求項4】
請求項3に記載の電動車両の制御装置であって、
前記シフト装置は、
前記操作レバーが前記切り替えゲートに沿って移動する場合に、前記操作レバーが前記第1ホームに出入りする際の前記操作レバーの動作線と、前記操作レバーが前記第2ホームに出入りする際の前記操作レバーの動作線とが、互いに交差している
ことを特徴とする電動車両の制御装置。
【請求項5】
請求項4に記載の電動車両の制御装置であって、
前記シフト装置は、
前記切り替えゲートにおいて前記操作レバーを前記第1ホームから前記第2ホームへ移動させるアクチュエータを更に有し、
前記コントローラは、
前記マニュアル変速モードが選択されている状態で、少なくとも、前記電動車両の運転を終了する意図のある操作が行われた場合、もしくは、前記手動操作による前記マニュアル変速モードの選択と併行して実行した前記電動車両の制御で、前記マニュアル変速モードの選択をリジェクトした場合に、前記アクチュエータを制御して前記操作レバーを前記第1ホームから前記第2ホームに移動させ、前記マニュアル変速モードから前記オートマチックモードへ切り替える
ことを特徴とする電動車両の制御装置。
【請求項6】
請求項5に記載の電動車両の制御装置であって、
前記運転者の踏み込み操作によって動作する模擬クラッチペダルを備え、
前記シフト装置は、
前記マニュアル変速モードが選択されている状態で、前記シフトゲート上の前記手動操作による前記操作レバーの移動を、前記踏み込み操作による前記模擬クラッチペダルの動作と連係して行うように構成されており、
前記コントローラは、
実際には搭載されていない仮想クラッチを備えていること、前記仮想クラッチにより前記仮想エンジンと前記仮想変速機との間で前記仮想エンジントルクを伝達および遮断すること、ならびに、前記模擬クラッチペダルの前記踏み込み操作によって前記仮想クラッチを動作させ、前記仮想クラッチの仮想伝達トルク容量を変化させること、を想定し、
前記踏み込み操作による前記模擬クラッチペダルの動作状態に基づいて前記仮想伝達トルク容量を算定し、算定された前記仮想伝達トルク容量で前記仮想エンジントルクを前記仮想変速機および前記駆動輪に伝達した場合に発生する前記仮想駆動力を想定した前記駆動力が発生するように、前記出力トルクを制御する
ことを特徴とする電動車両の制御装置。
【請求項7】
請求項1から6のいずれか一項に記載の電動車両の制御装置であって、
前記コントローラは、
前記手動操作による前記シフトポジションの選択と併行して実行した前記電動車両の制御で、前記手動操作によって選択された前記シフトポジションを変更またはリジェクトした場合に、前記変更または前記リジェクトを実施した後の前記シフトポジションを前記表示装置に表示させる
ことを特徴とする電動車両の制御装置。
【請求項8】
請求項7に記載の電動車両の制御装置であって、
音声または振動を発生して所定の情報を前記運転者に告知する音響振動装置を備え、
前記コントローラは、
前記手動操作による前記シフトポジションの選択と併行して実行した前記電動車両の制御で、前記手動操作によって選択された前記シフトポジションを変更またはリジェクトした場合に、前記音響振動装置で前記音声または前記振動を発生させることにより、前記変更または前記リジェクトが実施されたことを前記運転者に認識させる
ことを特徴とする電動車両の制御装置。
【請求項9】
請求項8に記載の電動車両の制御装置であって、
前記コントローラは、
前記手動操作による前記シフトポジションの選択がアクセプトされた場合に、前記音響振動装置で前記音声または前記振動を発生させることにより、前記シフトポジションの選択が完了したことを前記運転者に認識させる
ことを特徴とする電動車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
この発明は、少なくともモータを駆動力源とする電動車両の制御装置に関するものである。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
特許文献1には、マニュアルトランスミッションを搭載した車両(MT車両)の手動変速動作を、疑似的に実現した電気自動車が記載されている。この特許文献1に記載された電気自動車は、MT車両の手動変速動作を再現するためのシフト装置およびクラッチ装置、ならびに、電気自動車の動作を制御する制御装置を備えている。シフト装置は、運転者によって操作されることにより、モータの回転速度に対するトルク特性が段階的に異なる複数の仮想ギヤ段モードの中から、任意の仮想ギヤ段モードを選択する。クラッチ装置は、シフト装置の操作に併せて、運転者によって操作される。そして、制御装置は、シフト装置によって選択された仮想ギヤ段モードとクラッチ装置の操作量に基づいて仮想エンジンの回転数を演算し、演算した回転数を表示装置に表示させる。
【0003】
なお、特許文献2には、多段式の自動変速機を搭載した車両の変速操作装置が記載されている。この特許文献2に記載された車両は、エンジンを駆動力源として、エンジンの出力トルクが、自動クラッチを介して、多段式の自動変速機に入力される。そして、この特許文献2に記載された変速操作装置は、走行レンジの切り替え、および、シフトチェンジ(シフトダウン、シフトアップ)を行うための操作レバーを備えている。操作レバーがレンジ切り替えモードの位置にあるときは、運転者が操作レバーを前方へ操作することによってRレンジが設定され、運転者が操作レバーを後方へ操作することによってDレンジが設定される。操作レバーが手動変速モードの位置にあるときは、運転者が操作レバーを前方へ操作することによってシフトダウンが行われ、運転者が操作レバーを後方へ操作することによってシフトアップが行われる。手動変速モードでは、レンジ切り替えモードと比較して、操作レバーを前後方向に操作した際の操作反力が大きくなっている。
【先行技術文献】
【特許文献】
【0004】
特開2022-30862号公報
特開2021-62647号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の特許文献2に記載された変速操作装置は、操作レバーの前後の移動方向には、操作レバーがモーメンタリ動作し、レンジ切り替えモードと手動変速モードとの間は、操作レバーがオルタネイト動作するように構成されている。モーメンタリ動作は、操作レバーを移動させる操作力を解除した際に、操作レバーが所定の中立位置に戻る、いわゆる自己復帰タイプの動作方式である。オルタネイト動作は、操作レバーの操作力を解除した際に、その時点の(操作後の)操作レバーの位置が保持される、いわゆる自己保持タイプの動作方式、もしくは、ステーショナリ方式と呼ばれる動作方式である。
【0006】
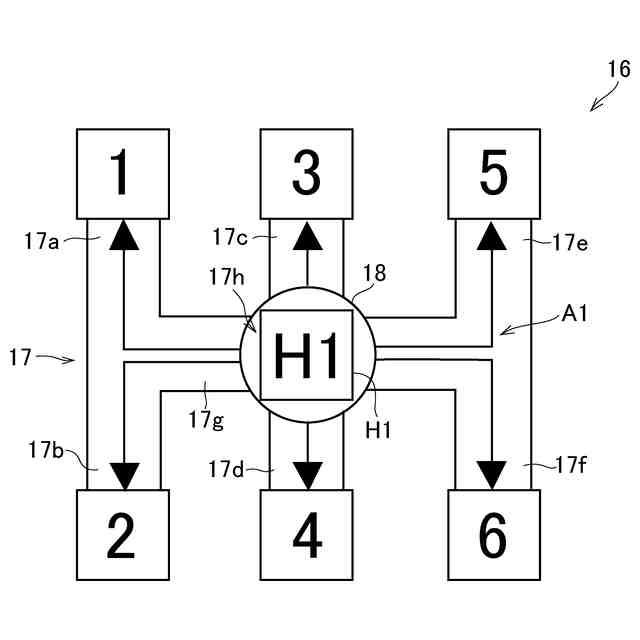
一方、特許文献1に記載された電気自動車では、従来のMT車両における手動変速の操作感覚を再現することに主眼が置かれており、そのために、疑似的なシフト装置およびクラッチ装置が設けられている。そのシフト装置は、実際のマニュアルトランスミッション用のシフト装置と同様に動作するように構成されたのものであり、上記のようなオルタネイト動作する動作方式(または、ステーショナリ方式)の操作装置である。したがって、特許文献1に記載されているシフト装置は、従来のMT車両に搭載されているシフト装置と同様に、いわゆるHパターン上に仮想の各シフトポジション(仮想ギヤ段)が配置されており、操作レバーの操作位置(操作後に操作レバーが保持される位置)と、設定される仮想ギヤ段とが一対一で対応する構成になっている。
【0007】
但し、特許文献1に記載されているシフト装置は、上記のように、仮想ギヤ段モードを選定するために疑似的に設けられたものであるので、機械的あるいは物理的な機構が用いられた従来のシフト装置とは異なり、シフト装置と制御装置とが、バイワイヤで電気的に接続されている。したがって、通常時は、シフト装置から送信される電気信号(指示信号)に基づいて、制御装置による車両および駆動力源(モータ)の制御が規則的に実行される。ところが、車両や駆動力源に不規則な挙動や動作が見られたり、何らかの異常が発生したりした場合は、シフト装置からの指示信号にかかわらず、制御装置が主体となって対応制御が実行される。そのような場合には、シフト装置における操作レバーの操作位置と、制御装置による車両や駆動力源の制御状態との対応関係がずれてしてしまう可能性がある。例えば、車両の走行中に、駆動力源のモータの回転数や温度が過剰に上昇した場合や、あるいは、バッテリーやインバータの動作に制限が掛かった場合は、シフト装置からの指示信号が、制御装置の対応制御によってリジェクトされて、上書きされる。その結果、操作レバーの操作位置(仮想ギヤ段、あるいは、疑似変速段)と、モータの制御状態(例えば、回転数および出力トルクの制御状態)とが合致しなくなり、それに伴って、運転者に違和感を与えてしまうおそれがある。また、適切な運転操作の妨げになってしまうおそれもある。
【0008】
この発明は上記の技術的課題に着目して考え出されたものであり、従来のマニュアルトランスミッションを搭載した車両における手動変速操作を疑似的に再現するとともに、その疑似的な手動変速操作と電動車両の運転状態との不一致あるいは不調和を回避して、適切に運転操作を行うことが可能な電動車両の制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
上記の目的を達成するために、この発明は、少なくともモータを含む駆動力源と、運転者の手動操作によって動作して複数のシフトポジションのいずれかを選択するシフト装置と、を備え、前記駆動力源の出力トルクを駆動輪に伝達して駆動力を発生するとともに、前記シフト装置で選択された前記シフトポジションに応じて前記出力トルクを制御することにより前記駆動力を制御することが可能な電動車両の制御装置であって、前記シフト装置は、複数の前記シフトポジションのいずれにも属さない第1ホームと前記各シフトポジションとをそれぞれ繋いだシフトゲート、および、前記手動操作の操作力によって前記シフトゲートに沿って移動するとともに、前記操作力が解除されることにより前記第1ホームの位置に復帰するモーメンタリ動作を行う操作レバーを有し、前記操作レバーが移動した先に配置された前記シフトポジションを選択するように構成されており、所定の情報を表示して前記運転者に告知する表示装置と、前記電動車両を制御するコントローラと、を備え、前記コントローラは、前記シフト装置から送信される電気信号に基づいて前記電動車両を制御するとともに、前記シフト装置で選択された前記シフトポジションを前記表示装置に表示させることを特徴とするものである。
【0010】
また、この発明における前記コントローラは、いずれも実際には搭載されていない仮想エンジンおよび仮想変速機を備えていること、前記仮想エンジンが出力する仮想エンジントルクを、前記仮想変速機を介して前記駆動輪に伝達し、前記駆動力を発生させること、ならびに、複数の前記シフトポジションにそれぞれ対応する複数の仮想変速段を前記仮想変速機で選択的に設定すること、を想定し、前記シフト装置で選択された前記シフトポジションに対応する前記仮想変速段を設定した前記仮想変速機を介して、前記仮想エンジントルクを前記駆動輪に伝達した場合に発生する仮想駆動力を想定した前記駆動力が発生するように、前記出力トルクを制御するように構成してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
端末
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
組電池
2日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
組電池
3日前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
内燃機関
7日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
防曇装置
7日前
トヨタ自動車株式会社
冷却装置
2日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
水系電池
7日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
空気軸受
1日前
トヨタ自動車株式会社
電池パック
7日前
トヨタ自動車株式会社
誘導電動機
7日前
トヨタ自動車株式会社
溶接ヘッド
3日前
トヨタ自動車株式会社
溶接ヘッド
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
車両下部構造
8日前
トヨタ自動車株式会社
車両前部構造
8日前
トヨタ自動車株式会社
配車管理装置
3日前
トヨタ自動車株式会社
変換アダプタ
3日前
トヨタ自動車株式会社
駐車支援装置
2日前
トヨタ自動車株式会社
運転支援装置
10日前
トヨタ自動車株式会社
冷却システム
2日前
トヨタ自動車株式会社
酸素貯蔵材料
10日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
地図表示装置
3日前
トヨタ自動車株式会社
配管保護構造
8日前
トヨタ自動車株式会社
情報処理装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ