TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088142
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202626
出願日
2023-11-30
発明の名称
走行制御装置、走行制御方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/08 20120101AFI20250604BHJP(車両一般)
要約
【課題】自車両の走行安全性を十分に向上させる。
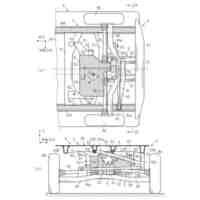
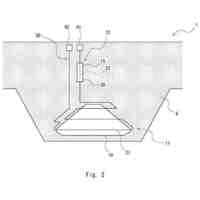
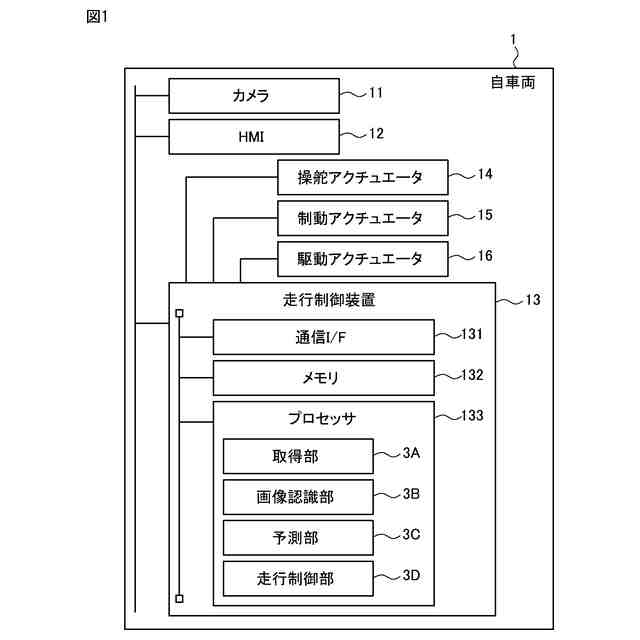
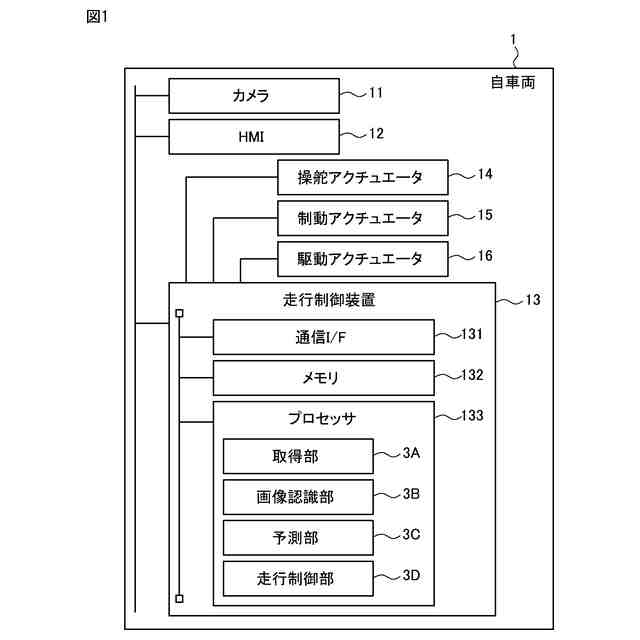
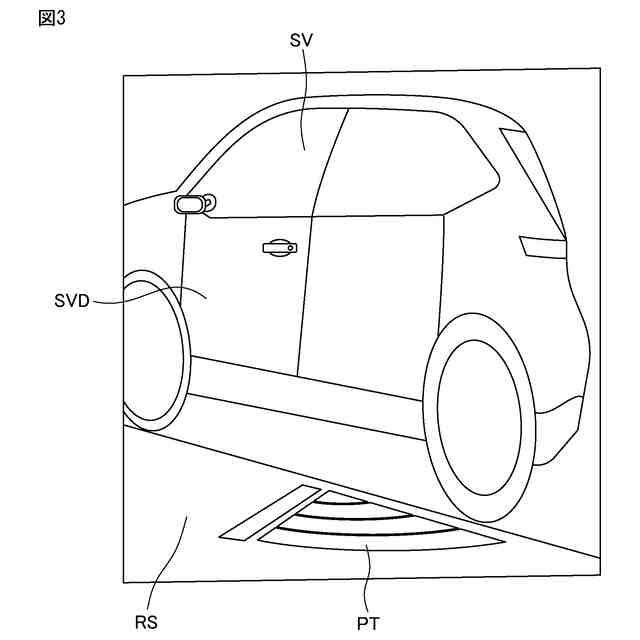
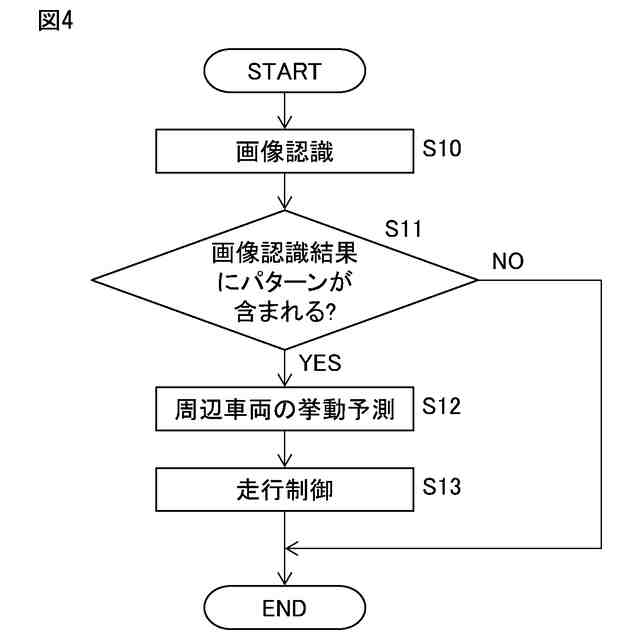
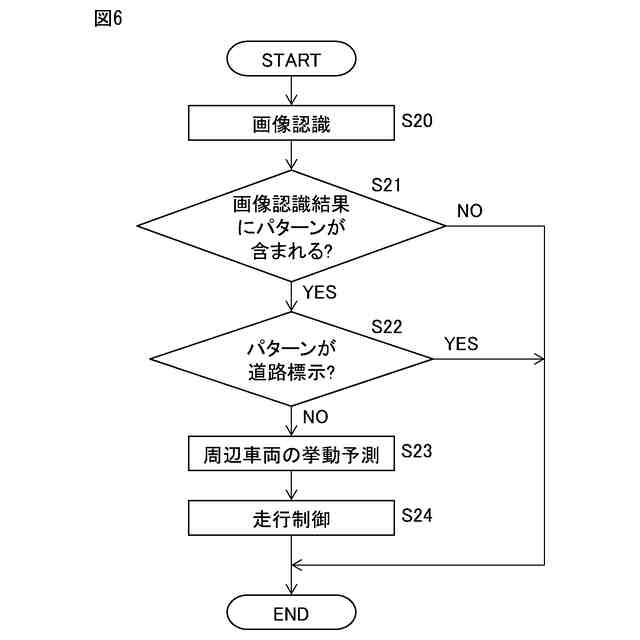
【解決手段】走行制御装置13は、周辺車両SVから照射される光によって路面RSに描画されたパターンPTの画像認識を実行する画像認識部3Bと、画像認識部3Bによって実行されたパターンPTの画像認識の結果に基づいて周辺車両SVの挙動を予測する予測部3Cと、予測部3Cによって予測された周辺車両SVの挙動に基づいて自車両1走行を制御する走行制御部3Dとを備える。
【選択図】図1
特許請求の範囲
【請求項1】
周辺車両から照射される光によって路面に描画されたパターンの画像認識を実行する画像認識部と、
前記画像認識部によって実行された前記パターンの画像認識の結果に基づいて前記周辺車両の挙動を予測する予測部と、
前記予測部によって予測された前記周辺車両の挙動に基づいて自車両の走行を制御する走行制御部とを備える走行制御装置。
続きを表示(約 610 文字)
【請求項2】
前記走行制御部は、前記周辺車両から照射される光によって路面に描画された前記パターンを避けて前記自車両を走行させる、請求項1に記載の走行制御装置。
【請求項3】
前記画像認識部によって実行された画像認識の対象である前記パターンが道路標示であるか否かを判定する判定部を備える、請求項1に記載の走行制御装置。
【請求項4】
走行制御装置が、周辺車両から照射される光によって路面に描画されたパターンの画像認識を実行する画像認識ステップと、
前記走行制御装置が、前記画像認識ステップにおいて実行された前記パターンの画像認識の結果に基づいて前記周辺車両の挙動を予測する予測ステップと、
前記走行制御装置が、前記予測ステップにおいて予測された前記周辺車両の挙動に基づいて自車両の走行を制御する走行制御ステップとを備える走行制御方法。
【請求項5】
プロセッサに、
周辺車両から照射される光によって路面に描画されたパターンの画像認識を実行する画像認識ステップと、
前記画像認識ステップにおいて実行された前記パターンの画像認識の結果に基づいて前記周辺車両の挙動を予測する予測ステップと、
前記予測ステップにおいて予測された前記周辺車両の挙動に基づいて自車両の走行を制御する走行制御ステップとを実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行制御装置、走行制御方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
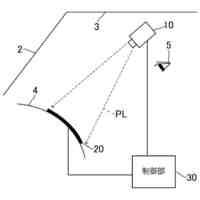
特許文献1には、路面を撮影するカメラ及び演算処理装置を備えるセンシングシステムが車両(自車両)に搭載される旨、他の交通参加者(例えば周辺車両等)が路面に描画したパターンがカメラに写る旨、演算処理装置がカメラの画像に写るパターンに基づいて自車両と他の交通参加者の状態を検出する旨、及び、センシングシステムを搭載する車両(自車両)がセンシングシステムの出力に応じてステアリングおよびアクセル、ブレーキの少なくともひとつを制御する旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/218498号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載された技術では、他の交通参加者によって路面に描画されるパターンが、他の交通参加者の将来の挙動(例えば他の交通参加者としての周辺車両が後退すること、他の交通参加者としての周辺車両(詳細には、ドアが閉じた状態の周辺車両)のドアが開くこと等)を予告するものではない。そのため、特許文献1に記載された技術では、自車両が、他の交通参加者によって路面に描画されるパターンに基づいて他の交通参加者の将来の挙動を予測することができない。その結果、特許文献1に記載された技術では、他の交通参加者によって路面に描画されるパターンに基づいて自車両の走行を適切に制御することができず、自車両の走行安全性を十分に向上させることができない。
【0005】
上述した点に鑑み、本開示は、自車両の走行安全性を十分に向上させることができる走行制御装置、走行制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本開示の一態様は、周辺車両から照射される光によって路面に描画されたパターンの画像認識を実行する画像認識部と、前記画像認識部によって実行された前記パターンの画像認識の結果に基づいて前記周辺車両の挙動を予測する予測部と、前記予測部によって予測された前記周辺車両の挙動に基づいて自車両の走行を制御する走行制御部とを備える走行制御装置である。
【0007】
(2)(1)の走行制御装置では、前記走行制御部は、前記周辺車両から照射される光によって路面に描画された前記パターンを避けて前記自車両を走行させてもよい。
【0008】
(3)(1)の走行制御装置は、前記画像認識部によって実行された画像認識の対象である前記パターンが道路標示であるか否かを判定する判定部を備えてもよい。
【0009】
(4)本開示の一態様は、走行制御装置が、周辺車両から照射される光によって路面に描画されたパターンの画像認識を実行する画像認識ステップと、前記走行制御装置が、前記画像認識ステップにおいて実行された前記パターンの画像認識の結果に基づいて前記周辺車両の挙動を予測する予測ステップと、前記走行制御装置が、前記予測ステップにおいて予測された前記周辺車両の挙動に基づいて自車両の走行を制御する走行制御ステップとを備える走行制御方法である。
【0010】
(5)本開示の一態様は、プロセッサに、周辺車両から照射される光によって路面に描画されたパターンの画像認識を実行する画像認識ステップと、前記画像認識ステップにおいて実行された前記パターンの画像認識の結果に基づいて前記周辺車両の挙動を予測する予測ステップと、前記予測ステップにおいて予測された前記周辺車両の挙動に基づいて自車両の走行を制御する走行制御ステップとを実行させるためのプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
9日前
個人
警告装置
1か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
1か月前
日本精機株式会社
ケース
2か月前
個人
車輪清掃装置
13日前
日本精機株式会社
表示装置
2か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
1日前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
2か月前
個人
ブレーキシステム
2か月前
個人
ワイパーゴム性能保持具
22日前
個人
自走式立体型洗車場
2か月前
株式会社クラベ
ヒータユニット
28日前
横浜ゴム株式会社
タイヤ
2か月前
個人
自動車ドア開度規制ベルト
1か月前
井関農機株式会社
収穫作業車両
29日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
株式会社ユーシン
照明装置
1か月前
日本精機株式会社
車両用表示装置
24日前
株式会社ユーシン
照明装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
トヨタ自動車株式会社
車両
今日
日本精機株式会社
車両用投影装置
3日前
帝国繊維株式会社
作業車両
2か月前
日本精機株式会社
車両用投影装置
3日前
個人
農業機械への架線給電システム
2か月前
エムケー精工株式会社
車両処理装置
20日前
エムケー精工株式会社
車両処理装置
2か月前
スズキ株式会社
車両制御装置
2か月前
ダイハツ工業株式会社
車両構造
1か月前
AGC株式会社
車両用窓ガラス
23日前
スズキ株式会社
車体構造
2か月前
スズキ株式会社
車両の制御装置
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ