TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025077895
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023190409
出願日
2023-11-07
発明の名称
上腕動作補助装置
出願人
学校法人早稲田大学
代理人
弁理士法人ドライト国際特許事務所
主分類
B25J
11/00 20060101AFI20250512BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】上腕の動きの自由度の低下を抑制し、かつ上腕の動作を補助する上腕動作補助装置を提供する。
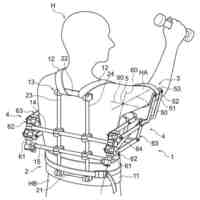
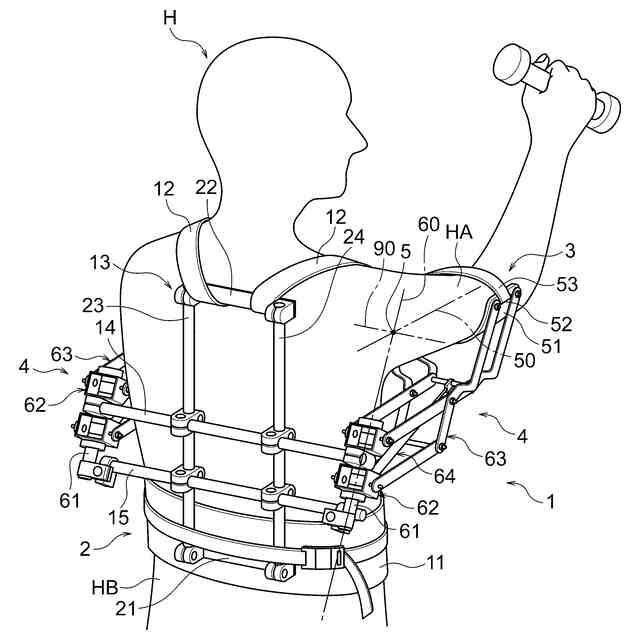
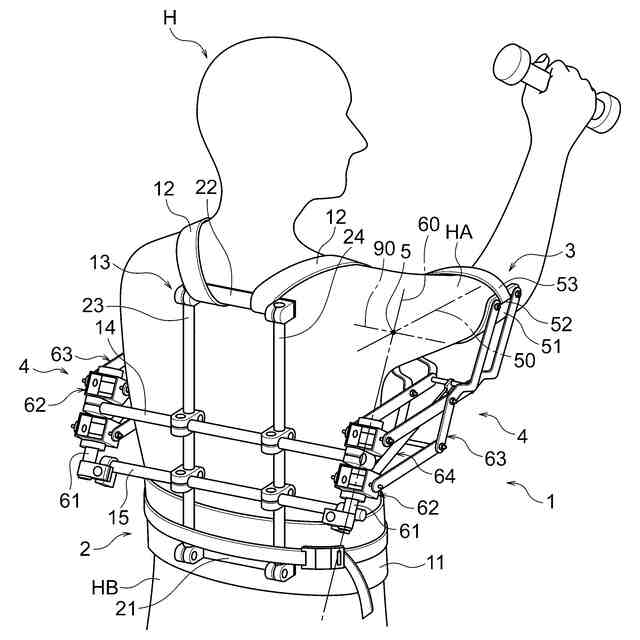
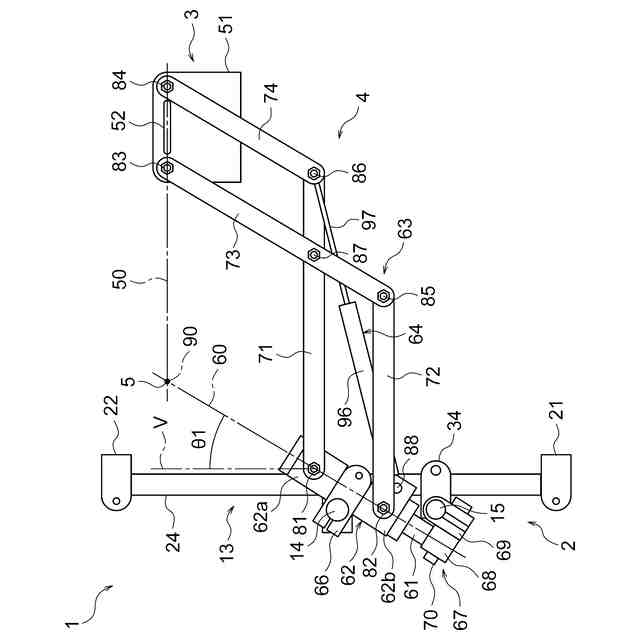
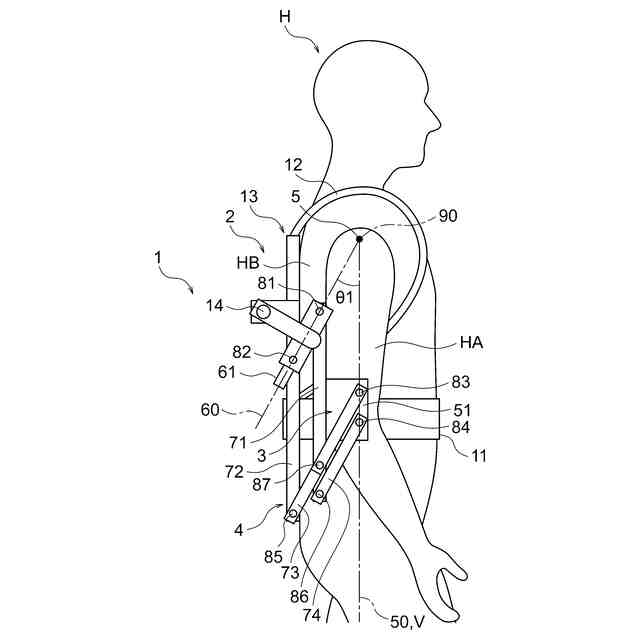
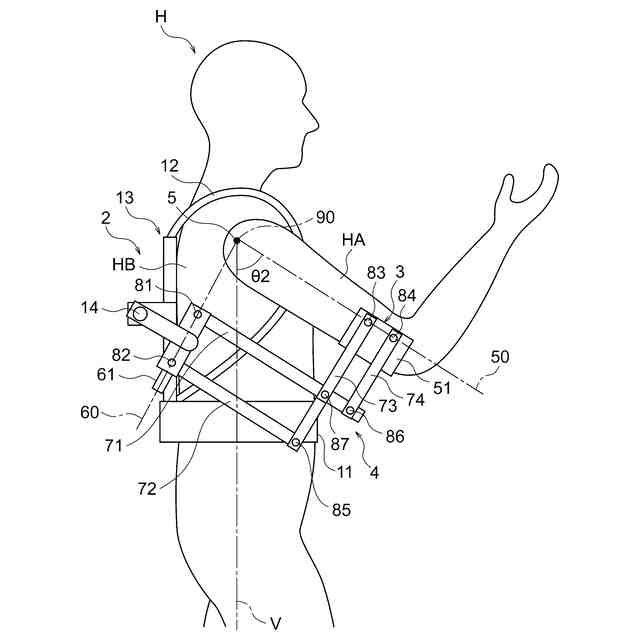
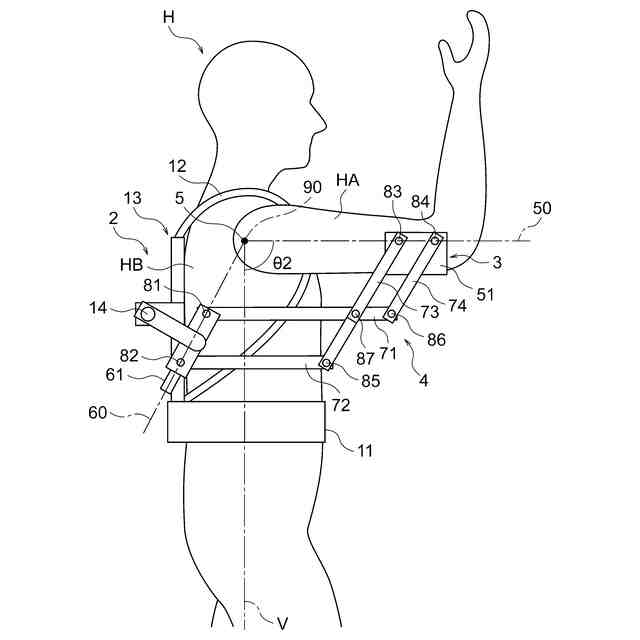
【解決手段】上腕動作補助装置1は、使用者Hに装着されて使用者Hの上腕HAの動作を補助する。上腕動作補助装置1は、使用者Hの胴部HBに着脱自在に装着される胴部装着部2と、上腕HAに着脱自在に装着される上腕装着部3と、胴部装着部2と上腕装着部3との間に設けられた遠隔運動中心機構4とを備え、遠隔運動中心機構4は、使用者Hの肩関節の位置に配置された遠隔運動中心5を有し、遠隔運動中心5の周りで上腕HAの動作に追従して回動し、かつ、上腕装着部3を介して上腕HAを押圧する。
【選択図】図1
特許請求の範囲
【請求項1】
使用者に装着されて前記使用者の上腕の動作を補助する上腕動作補助装置であって、
前記使用者の胴部に着脱自在に装着される胴部装着部と、
前記上腕に着脱自在に装着される上腕装着部と、
前記胴部装着部と前記上腕装着部との間に設けられた遠隔運動中心機構と
を備え、
前記遠隔運動中心機構は、前記使用者の肩関節の位置に配置された遠隔運動中心を有し、前記遠隔運動中心の周りで前記上腕の動作に追従して回動し、かつ、前記上腕装着部を介して前記上腕を押圧する上腕動作補助装置。
続きを表示(約 1,200 文字)
【請求項2】
前記上腕装着部は、前記上腕が配置される半円筒状の本体を有し、
前記遠隔運動中心機構は、前記胴部装着部に固定される軸部を有し、
前記本体は、第1中心軸線を有し、
前記軸部は、第2中心軸線を有し、
前記第1中心軸線と前記第2中心軸線とが交差する点が、前記遠隔運動中心を構成する請求項1に記載の上腕動作補助装置。
【請求項3】
前記遠隔運動中心機構は、
前記軸部に対し、前記第2中心軸線を中心として回動可能に設けられた回動部と、
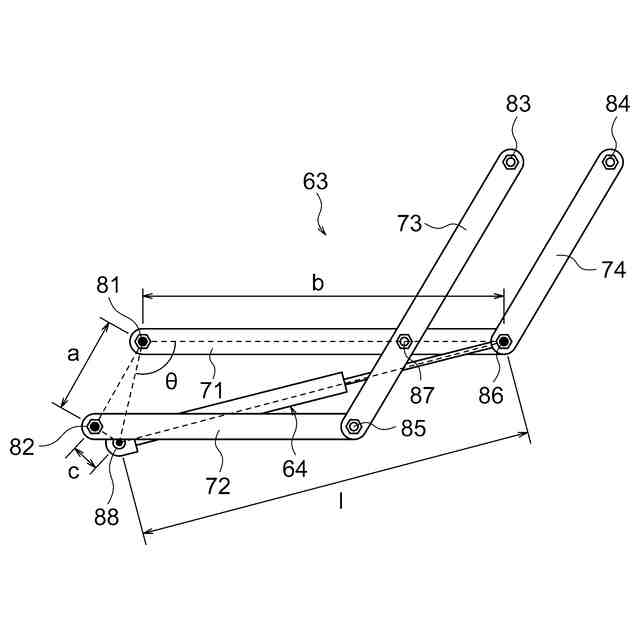
前記回動部に設けられた伸縮可能な平行リンク部と、
前記平行リンク部を伸長または収縮させる弾性部とを有する請求項2に記載の上腕動作補助装置。
【請求項4】
前記胴部装着部は、
前記使用者の腰に巻き付けて装着される腰ベルトと、
前記使用者の左右の肩のそれぞれに巻き付けて装着される一対の肩ベルトと、
前記使用者の背中に配置され、前記腰ベルトと前記一対の肩ベルトとを連結するフレームと、
前記フレームに固定され、前記フレームから左右方向へ突出している第1の筒体とを有し、
前記軸部は、前記第1の筒体に固定されている請求項3に記載の上腕動作補助装置。
【請求項5】
前記胴部装着部は、前記第1の筒体の下方で前記フレームに固定され、前記フレームから左右方向へ突出している第2の筒体を有し、
前記軸部は、前記第1の筒体および前記第2の筒体に固定されている請求項4に記載の上腕動作補助装置。
【請求項6】
前記平行リンク部は、
第1リンクと、
前記第1リンクと平行に配置された第2リンクと、
前記第1リンクと交差して配置された第3リンクと、
前記第3リンクと平行に配置された第4リンクと、
前記第1リンクの一端と前記回動部とを相対回転可能に連結する第1連結軸と、
前記第2リンクの一端と前記回動部とを相対回転可能に連結する第2連結軸と、
前記第3リンクの一端と前記本体とを相対回転可能に連結する第3連結軸と、
前記第4リンクの一端と前記本体とを相対回転可能に連結する第4連結軸と、
前記第2リンクの他端と前記第3リンクの他端とを相対回転可能に連結する第5連結軸と、
前記第1リンクの他端と前記第4リンクの他端とを相対回転可能に連結する第6連結軸と、
前記第1リンクの前記一端と前記他端との間の中間部と前記第3リンクの前記一端と前記他端との間の中間部とを相対回転可能に連結する第7連結軸とを有する請求項3に記載の上腕動作補助装置。
【請求項7】
前記弾性部は、ガススプリングで構成されている請求項3に記載の上腕動作補助装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、上腕動作補助装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば重い物を持ち上げる作業や腕を上げたまま維持して作業を行う際に、作業者の腕を後方から押圧して腕の動作を補助する装置が知られている。例えば、特許文献1には、作業者が腕を上げて作業をする際に作業者の腕を支持する作業支援装置が開示されている。
【0003】
特許文献1の作業支援装置は、弾性を有する弾性支持アームと、弾性支持アームの先端に設けられ作業者の腕の一部を下側から支持する腕受部と、弾性支持アームを上下方向に回転させるアーム保持部と、アーム保持部を水平方向に回転させるアーム移動手段とを備えている。アーム保持部およびアーム移動手段は、作業者の腕の付け根より下方に位置している。
【先行技術文献】
【特許文献】
【0004】
特開2014-172129号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の作業支援装置は、弾性支持アームの回転中心が肩関節の位置と異なっているため、上腕の動きに弾性支持アームが追従せず、上腕の動きを補助する補助力の得られる範囲が限られ、結果として上腕の動きの自由度が低下することがある。
【0006】
本発明は、上腕の動きの自由度の低下を抑制し、かつ上腕の動作を補助する上腕動作補助装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る上腕動作補助装置は、使用者に装着されて前記使用者の上腕の動作を補助する上腕動作補助装置であって、前記使用者の胴部に着脱自在に装着される胴部装着部と、前記上腕に着脱自在に装着される上腕装着部と、前記胴部装着部と前記上腕装着部との間に設けられた遠隔運動中心機構とを備え、前記遠隔運動中心機構は、前記使用者の肩関節の位置に配置された遠隔運動中心を有し、前記遠隔運動中心の周りで前記上腕の動作に追従して回動し、かつ、前記上腕装着部を介して前記上腕を押圧する。
【発明の効果】
【0008】
本発明によれば、上腕の動きの自由度の低下を抑制し、かつ上腕の動作を補助することができる。
【図面の簡単な説明】
【0009】
第1実施形態に係る上腕動作補助装置を使用者に装着した状態を示す後方斜視図である。
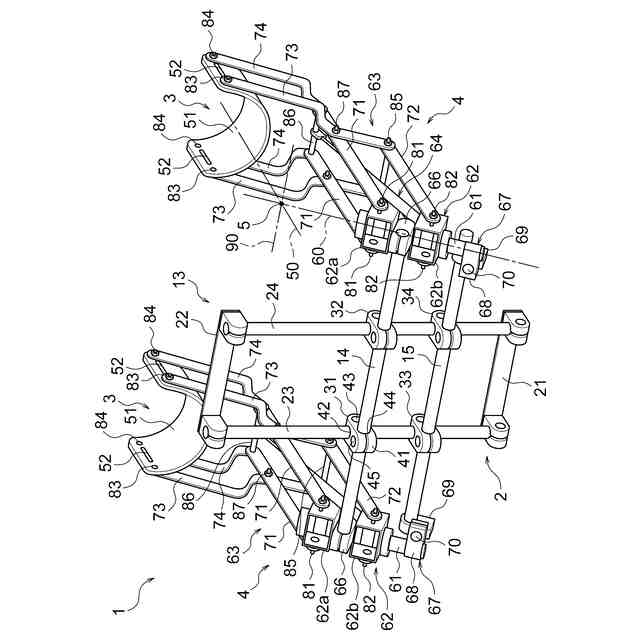
第1実施形態に係る上腕動作補助装置の後方斜視図である。
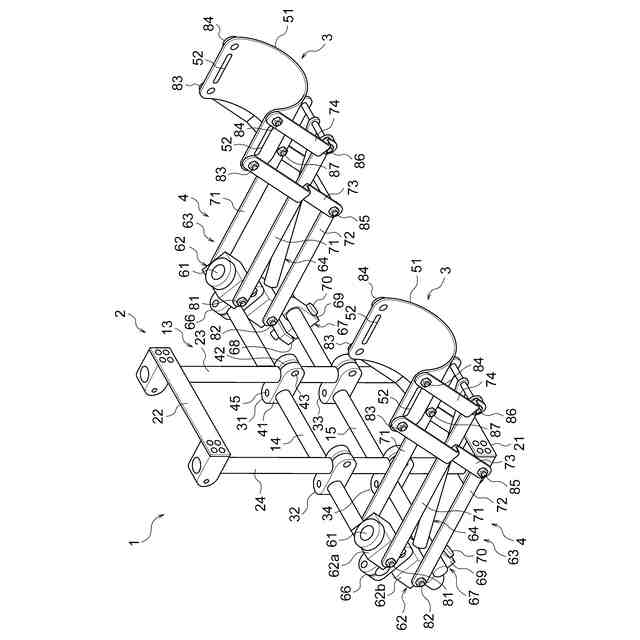
第1実施形態に係る上腕動作補助装置の前方斜視図である。
第1実施形態に係る上腕動作補助装置の側面図である。
弾性部の長さを求める方法を説明する説明図である。
使用者が上腕を下しているときの上腕動作補助装置の状態を示す概略図である。
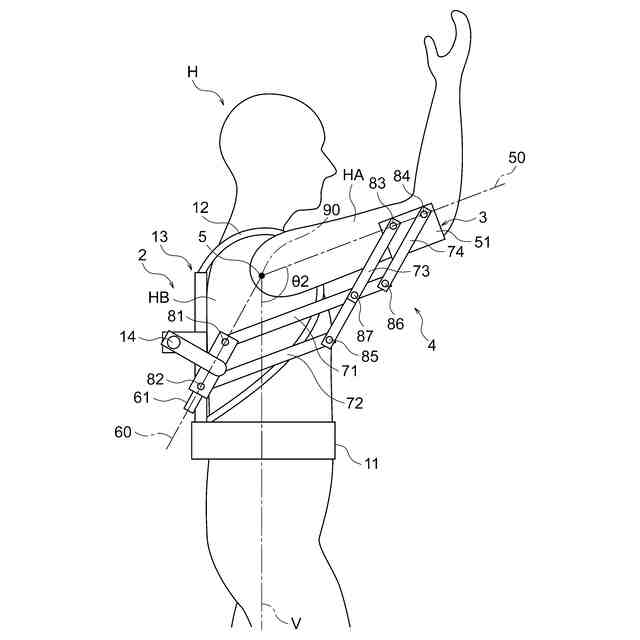
使用者が上腕を上げているときの上腕動作補助装置の状態を示す概略図である。
使用者が上腕をさらに上げているときの上腕動作補助装置の状態を示す概略図である。
使用者が上腕をさらに上げているときの上腕動作補助装置の状態を示す概略図である。
変形例に係る上腕動作補助装置の後方斜視図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明を実施するための形態を説明する。以下の説明及び図面では、共通の構成については共通の符号を付している。共通の符号を付した構成については適宜説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人早稲田大学
上腕動作補助装置
1日前
ENEOS株式会社
メタノールの製造方法及び製造装置
1日前
本田技研工業株式会社
環境表示装置及び環境表示システム
1か月前
学校法人早稲田大学
情報処理方法、情報処理装置、プログラム及び言語能力診断システム
26日前
日本電信電話株式会社
エネルギー関数の最小値探索装置、エネルギー関数の最小値探索方法、及びプログラム。
26日前
大学共同利用機関法人情報・システム研究機構
情報処理システム
8日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
26日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
18日前
株式会社不二越
ロボット
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
川崎重工業株式会社
ロボット
1か月前
東京都公立大学法人
対象物把持装置
1日前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
株式会社デンソー
操縦桿
1か月前
川崎重工業株式会社
制動システム
18日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社イノウ
給油口キャップ用開閉具
19日前
株式会社アイエイアイ
グリッパー
7日前
住友重機械工業株式会社
ロボット
12日前
庄内機械株式会社
釘打装置
5日前
オークラ輸送機株式会社
ハンド装置
今日
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
19日前
アイホン株式会社
ネジ締めカウントシステム
20日前
トヨタ自動車東日本株式会社
搬送治具
5日前
芝浦機械株式会社
双腕ロボット
11日前
トヨタ自動車株式会社
荷姿影響緩和方法
8日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
19日前
パナソニック株式会社
工具
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ